(54) ПРЕОБРАЗдВДТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ИНТЕРПОЛЯТОР ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ | 1973 |
|
SU369423A1 |
| Оптическое фотоэлектрическое устройство | 1990 |
|
SU1753444A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| СКАНИРУЮЩИЙ ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2002 |
|
RU2264595C2 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| Фотоэлектрический автоколлиматор | 1980 |
|
SU953458A1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
Изобретение относится к измерительной технике и может быть примене но для измерения перемещений .различных объектов. Известен преобразователь линейных перемещений объекта, содержащий свет делитель, две растровые решетки, одна из которых - основная - закреплен на контролируемом объекте, а другая решетка-индекс - выполнена подвижной фотоприемники, оптический компенсато установленный перед решеткой-индексом, следующую систему и цифровой отсчетный блок 13В указанном устройстве погрешнос совмещения оси колебаний подвижной решетки с осью штрихов основной решетки снижает точность измерения пе ремещений. Крс)ме .того, на точности измерения сказывается наличие мертвого хода и ошибок в механической системеперемещения компенсатора. Наиболее близким по технической сущности и достигаемс лу результату к предлагаемому является преобразователь линейных п.еремещений, содержёцций измерительный и опорный каналы, каждый из которых включает опти чески связанные осветитель, растровую решетку, объектив и фотопрйемник, а растровая решетка измерительного канала предназначена для установки на контролируемом o6beKTeL2j. В известном устройстве достижение высокой точности измерения ограничено требованием равенства шагов всех решеток между собой при малой величине линейного шага растра, что вызывает значительные технологические трудности. Цель изобретения - повышение точности измерения. Поставленная цель достигается тем, что преобразователь линейных перемещений снабжен отражательным элементом с плоскими попарно параллельньми отражающими поверхностями, установленными с возможностью углового перемещения в плоскости, перпендикулярной плоскости штрихов растровых решеток, в каждом канале осветитель, растровая решетка, объектив, одна из отражающих поверхностей отражательного элемента и фотоприемник установлены по автоколлимационной схеме, а отношение фокусных расстояний объективов прямо пропорционально отношению шагов соответствующих растровых решеток.
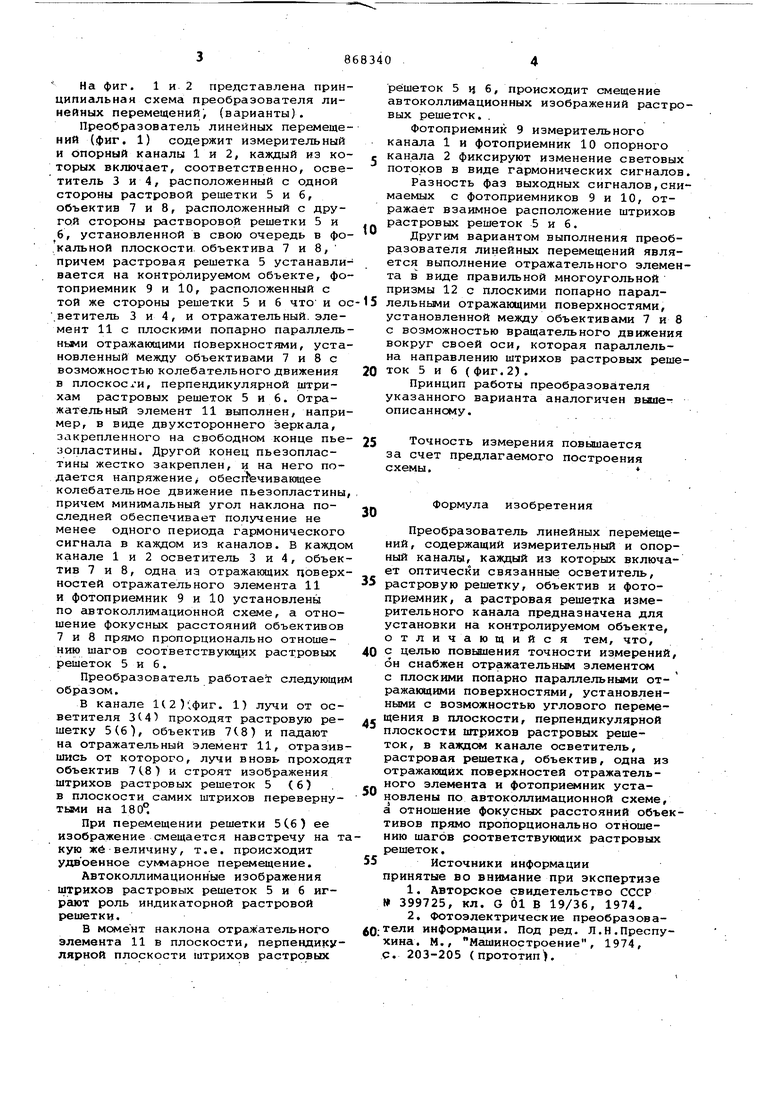
На фиг. 1 и 2 представлена принципиальная схема преобразователя линейных перемещений, (варианты).
Преобразователь линейных перемещений (фиг. 1) содержит измерительный и опорный каналы 1 и 2, каждый из которых включает, соответственно, осветитель 3 и 4, расположенный с одной стороны растровой решетки 5 и 6, объектив 7 и 8, расположенный с другой стороны растворовой решетки 5 и 6, установленной в свою очередь в фокальной плоскости объектива 7 и 8, причем растровая решетка 5 устанавливается на контролируемом объекте, фотоприемник 9 и 10, расположенный с той же стороны решетки 5 и 6 что и оветитель 3 и 4, и отражательный, элемент 11 с плоскими попарно параллельными отражающими поверхностями, установленный между объективами 7 и 8 с возможностью колебательного движения в плоскости, перпендикулярной штрихам растровых решеток 5 и 6. Отражательный элемент 11 выполнен, например, в виде двухстороннего зеркала, закрепленного на свободном конце пьезопластины. Другой конец пьезопластины жестко закреплен, и на него подается напряжениеj обестечивающее колебательное движение пьезопластины причем минимальный угол наклона последней обеспечивает получение не менее одного периода гармонического сигнала в каждом из каналов. В каждо канале 1 и 2 осветитель 3 и 4, объектив 7 и 8, одна из отражающих поверхностей отражательного элемента 11 и фотоприемник 9 и 10 установлены по автоколлимационной схеме, а отношение фокусных расстояний объективов 7 и 8 пропорционально отношению шагов соответствующих раст.ровых решеток 5 и 6.
Преобразователь работает следующи образом.
В канале 1(2);фиг. 1) лучи от осветителя 3(4) проходят растровую решетку 5(6), объектив 7 (.8) и падают на отражательный элемент 11, отразившись от которого, лучи вновь проходя объектив 7 (.8 ) и строят изображения штрихов растровых решеток 5 (6) в плоскости самих штрихов перевернутыми на 180°
При перемещении решетки 5 Сб) ее изображение смещается навстречу на ткую же величину, т.е. происходит удвоенное суммарное перемещение.
Автоколлимационные изображения штрихов растровых решеток 5 и 6 играют роль индикаторной растровой решетки.
В мсмент наклона отражательного элемента 11 в плоскости, перпендикулярной плоскости 111ТРИХОВ растровых
решеток 5 ч 6, происходит смещение автоколлимационных изображений растровых решеток..
Фотоприемник 9 измерительного канала 1 и фотоприемник 10 опорного с канала 2 фиксируют изменение световых потоков в виде гармонических сигналов.
Разность фаз выходных сигналов,сни маемых с фотоприемников 9 и 10, отражает взаимное расположение штрихов растровых решеток 5 и 6.
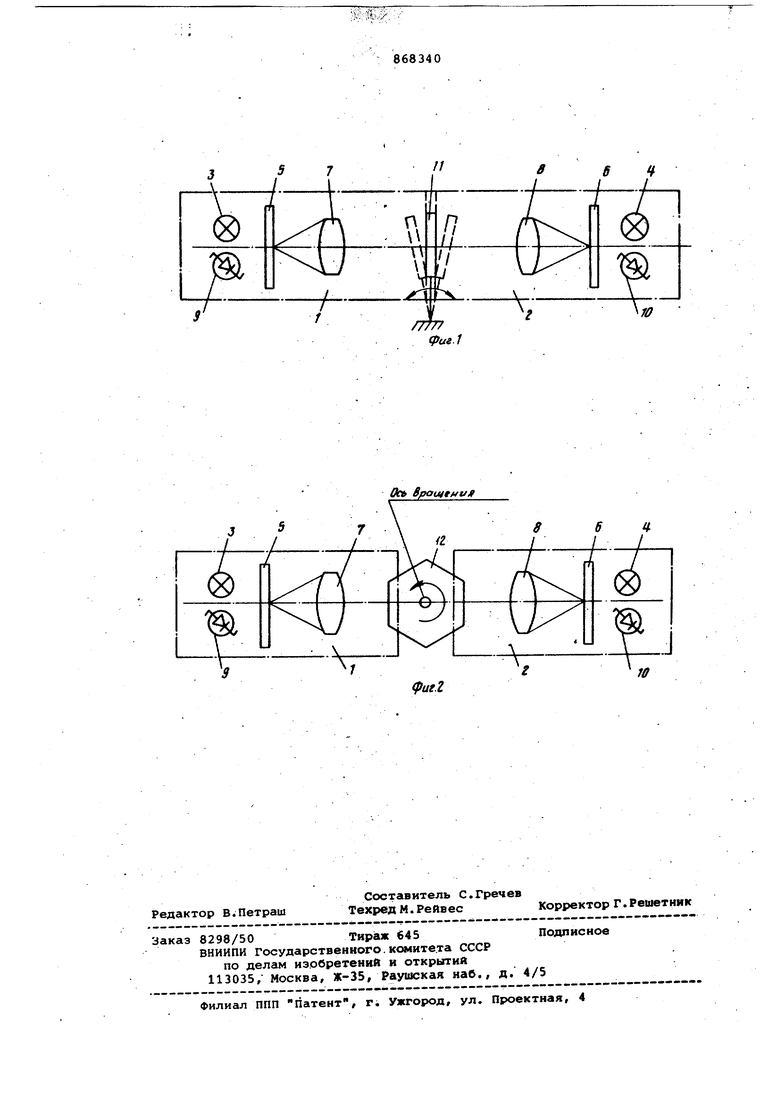
Другим вариантом выполнения преобразователя линейных перемещений является выполнение отражательного элемента в виде правильной многоугольной призмы 12 с плоскими попарно парал5 лельннми отражающими поверхностями, установленной между объективами 7 и 8 с возможностью вращательного движения вокруг своей оси, которая параллельна направлению штрихов растровых решеток 5 и 6 ( фиг.2).
Принцип работы преобразователя указанного варианта аналогичен выше-г описанному.
5 Точность измерения повышается за счет предлагаемого построения схемы.
Формула изобретения
Преобразователь линейных перемещений, содержащий измерительный и опорный каналы, каждый из которых включает оптически связанные осветитель, растровую решетку, объектив и фотоприемник, а растровая решетка измерительного канала предназначена для установки на контролируемом объекте, отличающийся тем, что, с целью повьниения точности измерений он снабжен отражательным элементом с плоскими попарно параллельными отражающими поверхностями, установленными с возможностью углового перемещения в плоскости, перпендикулярной плоскости штрихов растровых решеток, в каждом канале осветитель, растровая решетка, объектив, одна из отражающих поверхностей отражательного элемента и фотоприемник установлены по автоколлимационной схеме, а отношение фокусных расстояний объетивов прямо пропорционально отношению шагов соответствующих растровых решеток.
Источники информации принятые во внимание при экспертизе
С. 203-205 (прототип).
//
s ч
IJT О BpouftMve
