Группа изобретений относится к измерительной технике и может быть использована в оптическом приборостроении, точном машиностроении, метрологии.
Традиционная схема автоколлиматора для определения углового положения объекта содержит осветитель, марку, находящуюся в фокальной плоскости объектива, светоделитель, объектив, контрольный отражающий элемент (отражатель) в виде плоского зеркала или отражающей призмы, расположенный на контролируемом объекте, фотоэлектрический приемник в виде ПЗС-линейки или ПЗС-матрицы, находящийся в плоскости, сопряженной с плоскостью марки [1].
Измерение угловой подвижки отражателя относительно визирной оси автоколлиматора осуществляется путем регистрации величины сдвига центра тяжести изображения марки в плоскости приемника относительно положения его фоточувствительных пикселей.
В некоторых применениях требуется измерение угла лишь по одной координате. В этом случае целесообразнее в качестве приемника использовать ПЗС-линейку, обладающую более высокими быстродействием и надежностью, меньшими тепловыделением и тепловыми искажениями геометрии фоточувствительного прибора в процессе измерений, меньшим временем готовности к измерениям, более простым алгоритмом обработки информации, а также имеющую в сравнении с ПЗС-матрицей меньшую стоимость.
Основные параметры автоколлиматора: диапазон и точность угловых измерений, - взаимосвязаны и зависят от фокусного расстояния объектива, его аберраций, диаметра входного зрачка, размеров пикселей приемника, дистанции до зеркала. Обычно чем шире диапазон, тем больше допустимая погрешность измерений. Однако для решения некоторых практических задач требуется универсальный широкодиапазонный автоколлиматор с повышенной точностью измерений в центральной части диапазона. Такой автоколлиматор может иметь объектив с дискретным изменением фокусного расстояния для реализации двух режимов работы: предварительная наводка на отражатель в широком диапазоне через короткофокусный объектив и окончательная наводка с высокой точностью угловых измерений через длиннофокусный объектив [2], либо относительно короткофокусный объектив для реализации широкого диапазона измерений. При этом для повышения точностных характеристик используются специальные форма марки и алгоритм обработки измерительных сигналов [3], либо длиннофокусный объектив, обеспечивающий высокую точность измерений в относительно небольшом диапазоне, а для расширения диапазона измерений используется отражатель в виде многогранного зеркала [4], либо длиннофокусный объектив и отражатель в виде уголкового отражателя с малым отклонением одного из двухгранных углов от 90° и дополнительным отражающим покрытием на передней гране призмы, при отражении от которого в плоскости приемника формируются автоколлимационные изображения марки с разными коэффициентами преобразования углового смещения в линейное [5].
Перечисленные варианты обладают рядом недостатков: сложностью конструктивной реализации автоколлимационного устройства в целом или его составных частей, либо невысокой точностью измерений, в том числе и по центру углового диапазона.
Известен способ измерения перемещений изображения марки, выбранный в качестве прототипа по решаемой задаче [Пат. РФ №2602414, МПК G01B 11/26, G02B 27/30, приор. 10.06.2015 г.], включающий формирование в плоскости многоэлементного приемника излучения изображения марки в виде линейчатого растра, ширину боковых штрихов которого выбирают равной ширине элементов приемника излучения, а ширину центрального штриха выбирают равной удвоенной ширине остальных штрихов растра, далее измеряют сигналы с засвеченных элементов, запоминают их, фиксируют элемент, на котором сигнал отсутствует, на основе полученных данных вычисляют приближенное перемещение марки, определяют положение энергетического центра тяжести изображения линейчатого растра и с учетом полученного положения энергетического центра тяжести определяют величину перемещения изображения марки. Технический результат заключается в повышении точности за счет увеличения диапазона измерений и упрощении конструкции устройства.
Проблемами описанного способа является:
- большая вероятность потери информации вследствие высокой пространственной частоты линейчатого растра, которая при увеличении измеряемого угла и (или) расстояния до отражателя с учетом конечных аберраций реального объектива может привести к «заплыванию»1 (1 Под термином «заплывание» мы понимаем превышение величины сигналов с чувствительных элементов линейки некоего заранее установленного порогового уровня.) промежутков между сигналами приемника, а значит к искажению или к полной потере информации о положении экранируемого пикселя;
- небольшой диапазон измерения перемещений изображения марки, ограниченный условием «невыхода» изображения затененного участка изображения марки за пределы ПЗС-линейки;
- несоответствие измеренного перемещения марки истинному углу поворота отражателя вследствие конечных аберрационных искажений изображения марки реальным объективом при больших измеряемых углах и расстояниях до отражателя, т.е. сами измерения являются некорректными.
Известно фотоэлектрическое автоколлимационное устройство, выбранное в качестве прототипа по решаемой задаче (Авторское свидетельство СССР №1737264А1, МПК G01B 11/26, приор. 05.04.1990 г.). Устройство включает осветитель, оптически сопряженную с фотоприемником через промежуточные плоское и кольцевое зеркала щелевую диафрагму, выполненную в виде набора щелевых диафрагм, расположенных по обе стороны от центральной щелевой диафрагмы и имеющих разную ширину, на величину δ и Δ относительно центральной диафрагмы, основной объектив, размещенный на контролируемом объекте отражательный элемент, дополнительный объектив и два промежуточных плоских зеркала. Шаг между центрами щелевых диафрагм выполнен таким, чтобы шаг между центрами изображений диафрагм на линейке был немного меньше размера ПЗС-линейки. В исходном положении центральная щелевая диафрагма проецируется на линейке приемника в центре (на центральном приемном элементе). Блок опроса ПЗС и электронный блок в виде микропроцессора обрабатывают полученные сигналы с ПЗС-линейки и регистрируют положение изображения диафрагмы с высокой точностью. При рассогласовании контролируемого объекта с оптическим устройством контроля его положения происходит пропорциональное смещение изображения центральной щелевой диафрагмы вдоль линейки ПЗС-фотоприемника, которое при определенной величине рассогласования будет превышать геометрическую длину линейки. Но в момент выхода изображения центральной щелевой диафрагмы за пределы светочувствительной линейки ПЗС-приемника на другом ее конце появится изображение первой дополнительной щелевой диафрагмы. Если за пределы линейки приемника выйдет изображение первой дополнительной диафрагмы, то появится изображение второй дополнительной диафрагмы. Блок опроса ПЗС-линейки и микропроцессор идентифицируют и вычисляют расстояние между изображениями диафрагм и с их учетом выдают результаты определения угла поворота отражателя. Все это повышает чувствительность устройства на 30%, а пределы контролируемого параметра смещения отражателя (объекта) - в два раза.
Проблемами описанного устройства являются:
- значительные ошибки определения угла поворота отражателя по координатам изображения лишь одной из набора щелевых диафрагм с учетом конечных аберраций объективов;
- сложность конструкции в целом вследствие значительного числа оптических элементов на дистанции от щелевой диафрагмы до ПЗС-приемника, приводящего к росту ошибки позиционирования изображения марки на приемнике даже при весьма незначительных (по отдельности) вариациях положений элементов в оптическом тракте (например, вследствие неизбежных температурных колебаний геометрии корпуса прибора).
Мной в процессе исследований было установлено, что использование марки в виде растра из N+1 прозрачных щелей с равномерным распределением их центров вдоль марки и монотонным дискретным изменением их ширин, например, на ширину пикселя ПЗС-линейки, позволяет выбрать из отдельных изображений щелей марки на приемнике наименее искаженное аберрациями объектива изображение, положение центра тяжести которого на ПЗС-линейке наиболее близко соответствует углу поворота отражателя. Для осуществления этого необходимо: выбрать минимальные ширину щели и расстояние между соседними щелями в несколько раз больше размера пикселя, а общий размер растра щелей приблизительно равным размеру линейки;
- идентифицировать изображения щелей на ПЗС-линейке и определить конкретную щель на марке, световые лучи от которой падают на отражатель с минимальным углом относительно его нормали;
- выделить из общего изображения марки на приемнике изображение от найденной конкретной щели;
- использовать сдвиг выделенного изображения на ПС3-линейке в качестве индикатора угла поворота отражателя.
Используя выделенное изображение на ПЗС-линейке для определения угла поворота отражателя с применением корректирующей поправки, определяемой индивидуальными геометрическими и аберрационными параметрами объектива автоколлиматора, можно существенно (в несколько раз) увеличить диапазон угловых измерений автоколлиматора по сравнению с автоколлиматором с маркой из одиночной щели, и значительно (в несколько раз) уменьшить ошибку определения угла поворота отражателя по всему диапазону угловых измерений.
Решаемой проблемой заявленной группы изобретений является увеличение диапазона однокоординатных угловых измерений и обеспечение высокой точности измерений.
Поставленные задачи решаются тем, что
- в способе, включающем формирование изображение марки в виде растра штрихов в плоскости многоэлементного приемника излучения, новым является то, что марку выбирают в виде растра из N+1 прозрачных параллельных щелей с монотонным дискретным изменением их ширин, ширину растра выбирают не более размера ПЗС-линейки, минимальные ширину щели и расстояние между соседними щелями выбирают в несколько раз больше размера пикселя ПЗС-линейки, идентифицируют изображения щелей марки на ПЗС-линейке2 (2 Под термином идентификация мы подразумеваем установление однозначного соответствия между щелями марки и их изображениями на ПЗС-линейке.), по положениям центров тяжести изображений щелей для каждого k-го изображения щели марки вычисляют ориентировочный угол ϕk разворота отражателя по формуле:

где:
δk - сдвиг k-й щели в марке относительно ее центра, мм;
ЦТk - положение центра тяжести изображения3 (3 Подходы к определению ЦТ изображения на линейке известны.) k-й щели на ПЗС-линейке относительно ее центра при развороте отражателя на угол ϕ относительно визирной оси АК, мм;
F - фокусное расстояние объектива АК, мм;
для вычисленных ориентировочных углов разворота отражателя определяют среднее значение угла  , по величине сдвига δi, ближайшей к произведению F tan
, по величине сдвига δi, ближайшей к произведению F tan  , определяют i-ю щель в марке, угол падения световых лучей от которой на отражатель относительно его нормали наиболее близок к 0, вычисленное в соответствии с (1) значение угла ϕi для найденной щели марки используют в качестве величины измеренного угла, для уточнения этой величины применяют корректирующую поправку, определяемую индивидуальными геометрическими и аберрационными параметрами объектива автоколлиматора;
, определяют i-ю щель в марке, угол падения световых лучей от которой на отражатель относительно его нормали наиболее близок к 0, вычисленное в соответствии с (1) значение угла ϕi для найденной щели марки используют в качестве величины измеренного угла, для уточнения этой величины применяют корректирующую поправку, определяемую индивидуальными геометрическими и аберрационными параметрами объектива автоколлиматора;
- в устройстве, содержащем осветитель, марку в виде растра щелевых диафрагм, объектив, отражатель, установленный на контролируемом объекте, ПЗС-линейку, блок опроса ПЗС и электронный блок, новым является то, что растр щелевых диафрагм выбран в виде растра из Ν+1 прозрачных параллельных щелей с монотонным дискретным изменением их ширин, размер растра выбран не более размера ПЗС-линейки, минимальные ширина щели и расстояние между соседними щелями выбраны в несколько раз больше размера пикселя ПЗС-линейки, блок опроса ПЗС и электронный блок выполнены в виде блока управления и обработки сигналов, определяющего величину измеряемого угла поворота отражателя с учетом корректирующей поправки, заложенной в его память.
Сущность изобретения поясняется чертежами.
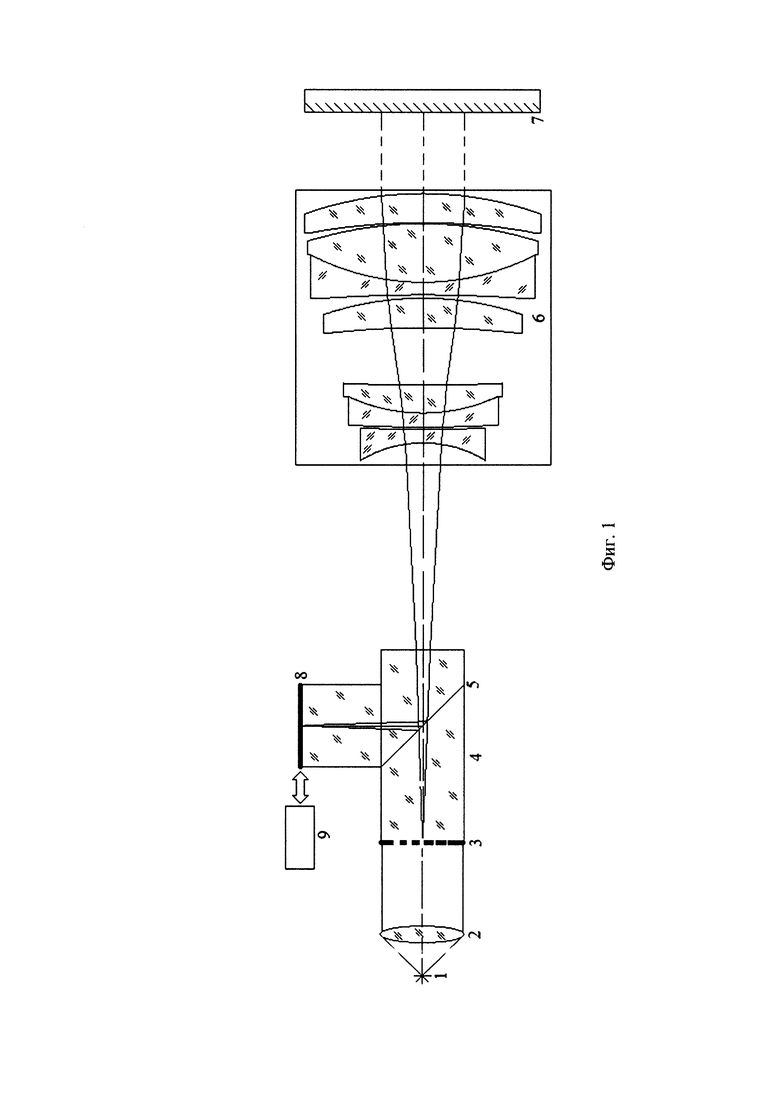
На фиг.1 представлена блок-схема автоколлимационного устройства, где последовательно установленные вдоль оптической оси источник 1 излучения, конденсор 2, марка 3 в виде растра прозрачных параллельных щелей с монотонным дискретным изменением их ширин, призменный блок 4 со светоделительной гранью 5, объектив 6, установленный на контролируемом объекте отражатель 7, например в виде плоского зеркала, многоэлементный приемник 8 излучения, например, в виде ПЗС-линейки, блок управления и обработки сигналов 9. Марка 3 и многоэлементный приемник 8 излучения установлены в фокальных сопряженных плоскостях объектива 6; двунаправленная стрелка  между блок управления и обработки сигналов и ПЗС-линейкой обозначает обмен управляющими и измерительными сигналами.
между блок управления и обработки сигналов и ПЗС-линейкой обозначает обмен управляющими и измерительными сигналами.
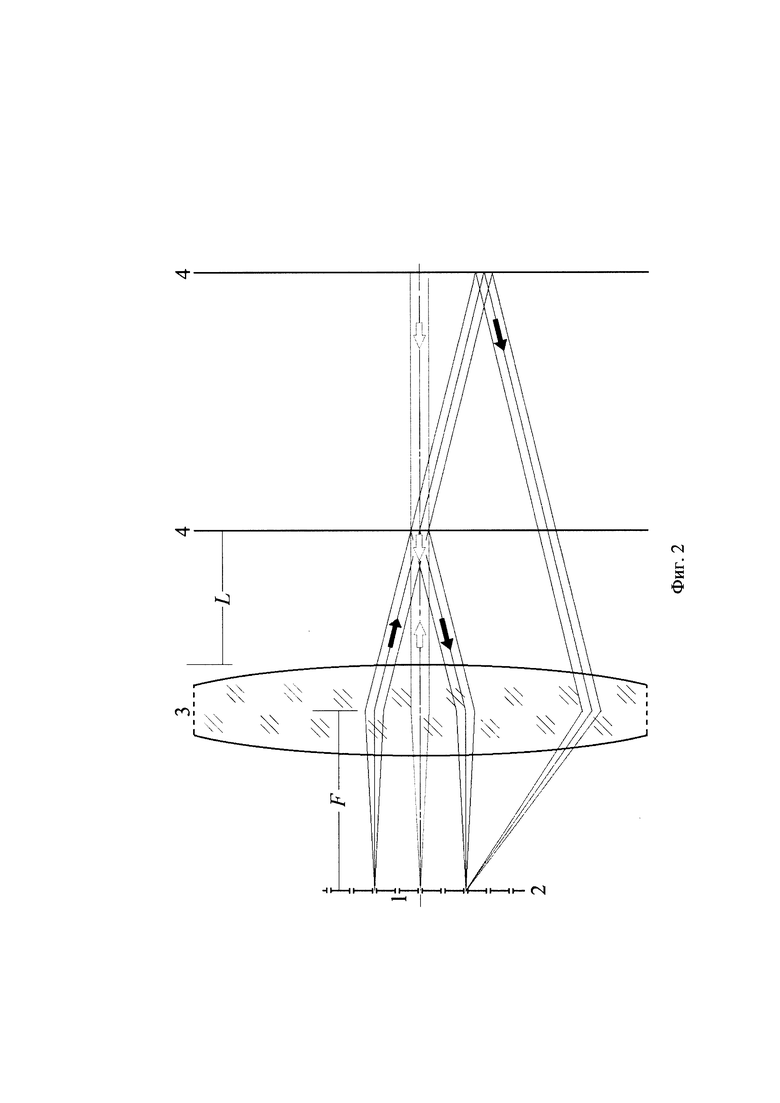
На фиг.2 представлена схема автоколлиматора с прорисовкой хода лучей от прозрачных щелей 1 марки через объектив 2 до ПЗС-линейки 3 с промежуточным отражением от нормально расположенного относительно визирной оси автоколлиматора отражателя 4, где полые стрелки обозначают ход лучей от центральной щели марки, а сплошные стрелки - ход лучей от одной из периферийных шелей, F - фокусное расстояние объектива, L - расстояние от объектива до зеркала.
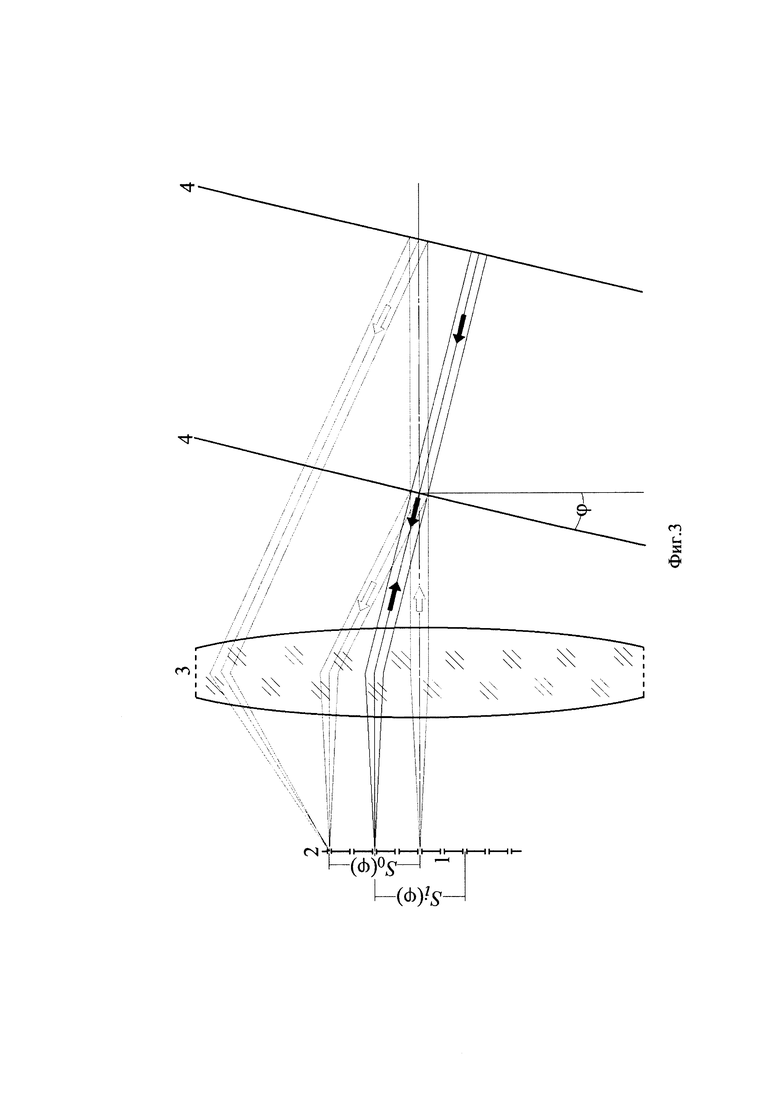
На фиг.3 представлена условная схема автоколлиматора с прорисовкой хода лучей от прозрачных щелей 1 марки через объектив 2 до ПЗС-линейки 3 с промежуточным отражением от развернутого на угол ϕ отражателя 4, где полые стрелки обозначают ход лучей от центральной щели марки, а сплошные стрелки - ход лучей от одной из периферийных шелей, ϕ - угол разворота отражателя, S0(ϕ) и Si(ϕ) - смещение центров тяжести изображений центральной и i-ой щелей при развороте отражателя, соответственно.
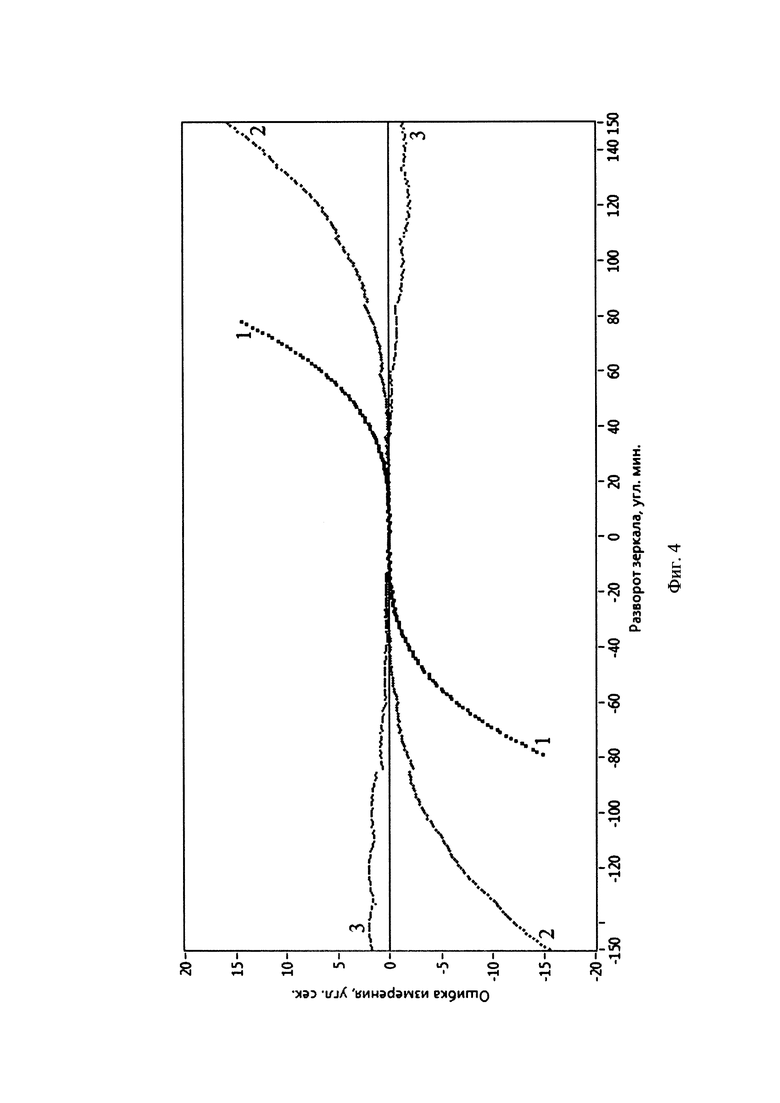
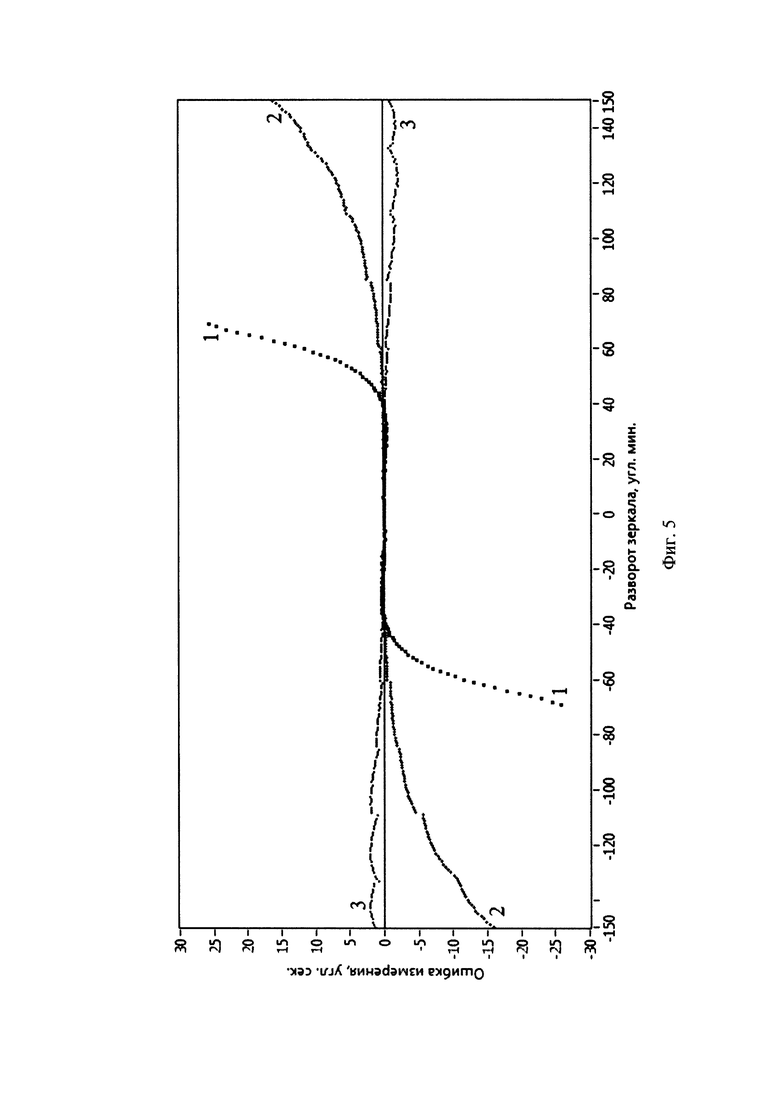
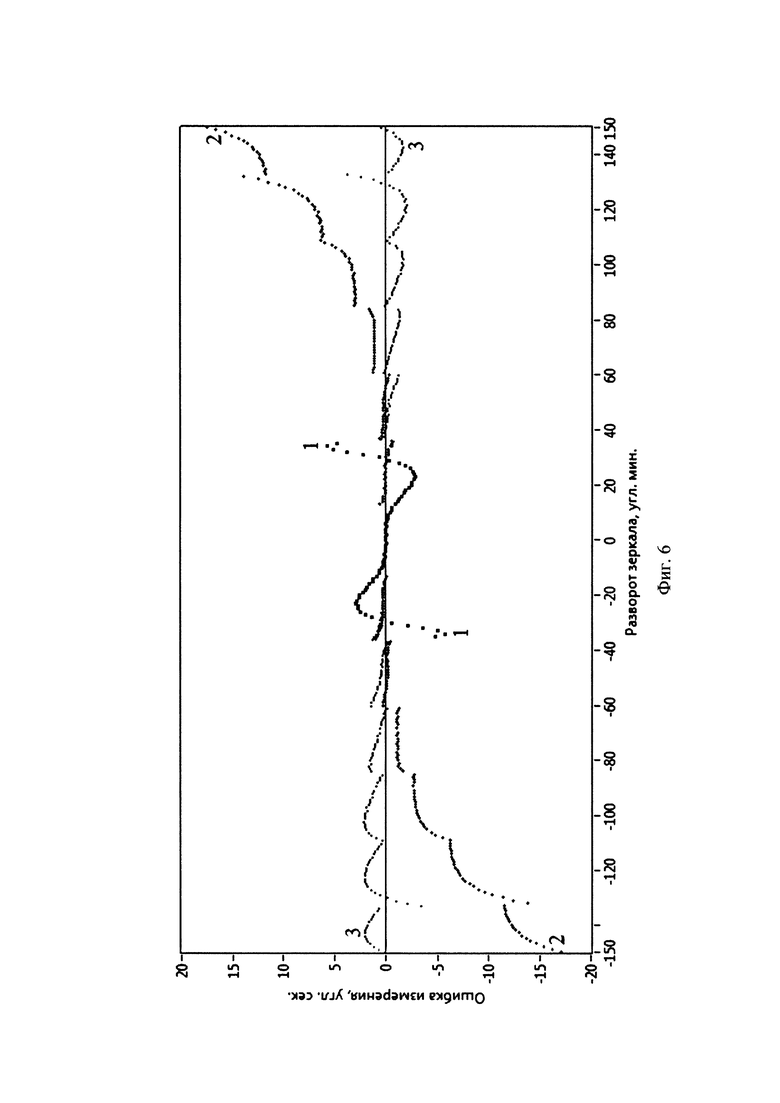
На фиг.4, 5, 6 представлены результаты расчетов систематических ошибок угловых измерений для автоколлиматора, описанного в [7], для двух реализаций формы марки: одиночная прозрачная щель (массив точек 1-1) или растр прозрачных параллельных щелей (массив точек 2-2 и 3-3), при расстояниях до отражателя 50, 500 и 1000 мм, соответственно.
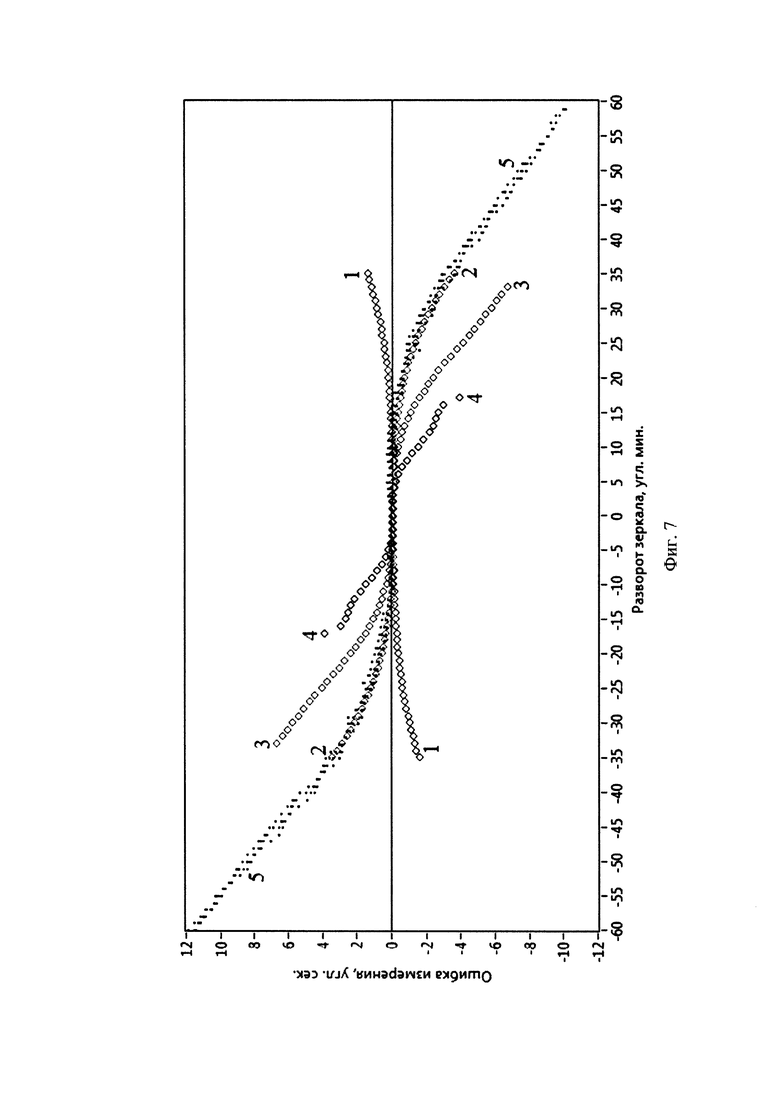
На фиг.7 представлены результаты расчетов систематических ошибок угловых измерений для автоколлиматора с 3-х линзовым телеобъективом, описанного в [8] (задача 19.2), для двух реализаций формы марки: одиночная прозрачная щель (массивы крупных полых точек 1-1, 2-2, 3-3 и 4-4 при расстояниях до отражателя 50, 500, 1000 и 2000 мм, соответственно) или растр прозрачных параллельных щелей (массив мелких точек 5-5 для дистанций до отражателя от 50 до 2000 мм).
Суть заявляемого способа измерения перемещения марки заключается в следующем. При малом расстоянии до нормально расположенного зеркала (L~F) (фиг.2) лучи от щелей марки, показанных на рисунке в виде точечных диафрагм (вид сверху), строят изображения щелей на приемнике практически без искажений, поскольку лучи проходят вблизи центра объектива и под небольшими углами относительно его оси.
При увеличении расстояния L лучи от периферийных щелей после отражения сдвигаются к краю объектива и углы «изломов» траекторий при его прохождении растут. Аберрации наклонных пучков приводят к заметным искажениям изображений щелей марки, причем в общем случае чем дальше от оси расположена щель, тем сильнее искажения ее изображения. Искажения изображения центральной щели остаются минимальными и практически не зависящими от расстояния. Таким образом, фиксацию нулевого угла разворота зеркала следует проводить по анализу изображения центральной щели.
Ситуация меняется при развороте зеркала. Допустим, зеркало развернуто относительно оси объектива на угол ϕ (фиг.3). Положение центра тяжести изображения центральной щели смещается в плоскости приемника на величину S0(ϕ). При увеличении расстояния L отраженные от зеркала лучи центральной щели сдвигаются к краю объектива, аберрации наклонных пучков растут и искажают проекцию щели в плоскости приемника. Это приводит к изменению величины S0(ϕ) и росту ошибки измерения угла ϕ. Предположим, что для данного угла ϕ лучи от i-й щели марки падают на зеркало нормально, т.е. отраженные лучи накладываются на исходные. Тогда траектории прохождения лучей через объектив слабо зависят от расстояния до зеркала и смещение проекции щели Si(ϕ) (относительно ее условного начального изображения в идеальной, безаберрационной оптической системе) остается почти неизменным. Таким образом, данный конкретный угол ϕ с точки зрения погрешности его автоколлимационного измерения следует определять по анализу изображения i-й щели в плоскости приемника, т.е. по смещению Si(ϕ). При произвольном угле разворота зеркала измерения целесообразно проводить по анализу изображения той из щелей, угол падения лучей от которой на зеркало наиболее близок к π/2. Адекватные результаты измерения в полном диапазоне разворота зеркала будут иметь место при адаптивном выделении из всех проекций щелей нужного для анализа изображения. Очевидно, что в этом случае щели в марке должны быть «окрашенными», т.е. различаться по ширине таким образом, чтобы их изображения надежно идентифицировались в плоскости приемника. Например, ширины щелей марки дискретно изменяются на ширину пикселя линейки. При эквидистантном положении на марке центров щелей расстояния между щелями также дискретно меняются на эту же величину, что также способствует правильной идентификации изображений щелей марки на линейке.
Расчет характеристик автоколлиматора (АК) с использованием предложенного способа измерений проведем для описанного в [7] АК с 7-ми линзовым телеобъективом с фокусным расстоянием и диаметром входного зрачка 142 и 43 мм. В качестве приемника в [7] использовалась ПЗС-линейка из 1024 пикселей с шириной/высотой вдоль линейки 13/150 мкм. Для измерения угла в горизонтальной плоскости использовался одиночный прозрачный штрих марки шириной 140 мкм. В диапазоне угловых измерений ±10' экспериментально измеренная ошибка не превышала ±0,7''.
Для параметров используемого в АК телеобъектива методом Монте-Карло путем случайной трассировки лучей через все оптические элементы был проведен расчет возможных систематических ошибок угловых измерений вследствие конечных аберрационных искажений световых пучков при прохождении по оптическому тракту АК с промежуточным отражением от дистанционно установленного отражателя.
Результаты моделирования реакции АК с маркой из 13 прозрачных штрихов с дистанциями между центрами 1 мм, шириной от 100 до 220 мкм, шагом дискретизации 10 мкм, для разных алгоритмов обработки измерительных сигналов при дистанции до зеркала L=50 мм представлены на фиг.4. Отражатель расположен вертикально и разворачивается в горизонтальной плоскости в диапазоне ±150' через 1'. Массив точек 1-1 отражают результаты при обработке изображения только центрального штриха марки и соответствуют реакции типичного АК с маркой в виде одиночного штриха. Массив точек 2-2 соответствуют способу определения угла с адаптивным выделением из всех проекций штрихов нужного для анализа изображения i-го штриха, и, соответственно, нужного значения вычисленного угла ϕi. Как видно из рисунка, в диапазоне выдачи угловой информации по изображению центрального штриха (диапазон точек 1-1) использование метода с адаптивным выделением оптимального для анализа изображения приводит примерно к десятикратному снижению систематической ошибки измерений при одновременном, почти двукратном расширении общего диапазона измерений (точки 2-2). Для частичной коррекции ошибок по краям расширенного диапазона может быть использована дополнительная поправочная функция. В частности, для моделируемого объектива хороший результат дает замена в выражении (1) суммы арктангенсов от аргументов на арктангенс от суммы аргументов:

Массив точек 3-3 рисунка отражает результат при осуществлении указанной коррекции.
Поскольку, как отмечалось выше, положение центра тяжести изображения оптимального i-го штриха слабо зависит от расстояния до отражателя, то выражение (2) может быть использовано для коррекции систематической ошибки и на других дистанциях. На фиг.5 и 6 представлены результаты моделирования для дистанций до отражателя L=500 мм и L=1000 мм, соответственно.
При увеличении дистанции до зеркала выигрыш в части кратности расширения диапазона измерений при использовании адаптивного алгоритма растет, поскольку вследствие виньетирования обратно отраженного пучка диапазон выдачи угловой информации по центральному штриху падает с ±79' до±35'.
Систематическая ошибка при обработке изображения центрального штриха составляет ±26'', но в диапазоне ±35' она для всех дистанций не превышает ±7'', при этом в диапазоне ±10' она менее ±1'' (что коррелирует с параметрам АК в [7]), а в диапазоне ±6' - менее ±0,1''. В диапазоне ±150' систематическая ошибка измерений по скорректированному адаптивному алгоритму для всех дистанций не превышает ±4''. В диапазоне ±12' угловая информация определяется по изображению центрального штриха с соответствующими ошибками.
Таким образом, применение предложенного способа измерений перемещений изображения марки позволяет для анализируемого АК в диапазоне расстояний до отражателя от 50 до 1000 мм расширить диапазон угловых измерений в 150735' ≈ 4,3 раза при уменьшении систематической погрешности в 2674''=6,5 раз, при сохранении исходной высокой точности измерений по центру углового диапазона.
Аналогичное расчетное моделирование было проведено для АК с 3-х линзовым телеобъективом с параметрами, описанными в [8] (задача 19.2), при расстоянии до отражателя от 50 до 2000 мм, в диапазоне угловых измерений ±60' (фиг.7). Фокусное расстояние объектива 320 мм, световой диаметр положительной склейки линз при моделировании принимался равным 42 мм, отрицательной линзы - 14 мм. В качестве марки при моделировании использовался растр из 27 прозрачных штрихов шириной от 40 до 300 мкм с шагом дискретизации 10 мкм и расстоянием между центрами штрихов 500 мкм. На рисунке представлены результаты моделирования систематических ошибок АК. Массивы крупных полых точек 1-1, 2-2, 3-3 и 4-4 отражают, соответственно, результаты моделирования систематической ошибки с вычислениями по центральному штриху марки при расстоянии до отражателя 50, 500, 1000 и 2000 мм, массив мелких точек 5-5 отражает варьирование результатов измерений на четырех дистанциях с вычислениями по оптимальным (с использованием адаптивного алгоритма) штрихам марки.
Как видно из рисунка, для данного объектива результаты вычисления угла по центральному штриху ближе к истине при минимальном расстоянии L, однако при его увеличении адаптивный алгоритм показывает более адекватные результаты. Поскольку типичный допустимый диапазон расстояний до КЭ при измерениях превышает, по крайней мере, в несколько раз фокусное расстояние объектива, использование адаптивного алгоритма в целом и в этом случае оказывается предпочтительным. Обратим внимание на хорошее совпадение результатов угловых вычислений по адаптивному алгоритму для разных дистанций (отличия в пределах 1''), что подтверждает сделанный ранее вывод о возможности применения общей поправки для адаптивного алгоритма с целью нивелирования ошибки по краям расширенного диапазона. Вид поправки определяется геометрическими и аберрационными параметрами объектива, т.е. для каждого объектива она индивидуальна. Для данного объектива использование корректирующей поправки позволит уменьшить систематическую ошибку во всем диапазоне до уровня ±0,5".
Для АК с описанным 3-х линзовым телеобъективом применение предложенного способа измерений перемещений изображения марки позволяет при расстоянии до отражателя от 50 до 2000 мм расширить диапазон угловых измерений в 60717' ≈ 3,5 раза при уменьшении систематической погрешности в 7''/0,5''=14 раз, при сохранении исходной высокой точности измерений по центру углового диапазона.
Таким образом, применение распределенной марки из растра прозрачных штрихов, ширины которых меняются известным дискретным образом, в сочетании с адаптивным алгоритмом обработки сигналов позволяет существенно расширить диапазон угловых измерений АК - кратность расширения диапазона в зависимости от дистанции до отражателя может составлять до нескольких раз, при обеспечении высокой точности измерений в центральной части диапазона. Неизменный, практически независящий от расстояния до отражателя характер систематической ошибки, позволяет для конкретного объектива АК вводить индивидуальную поправку для уменьшения в несколько раз систематической ошибки угловых измерений в расширенном диапазоне.
На нашем предприятии выпущен комплект рабочей документации для изготовления высокоточного однокоординатного автоколлиматора с расширенным диапазоном угловых измерений.
Литература.
1. Высокоточные угловые измерения / Под ред. Ю.Г. Якушенкова, М.: Машиностроение, 1987. 480 с.
2. Скляров С.Н., Семенов О.Б., Щеглов С.Н. Автоколлимационное измерительное устройство. Патент РФ №2491586, приор. от 23.01.2012 г.
3. Солдатов В.П. Способ для измерения перемещений изображения марки в цифровых автоколлиматорах и устройство для его осуществления. Патент РФ №2602414, приоритет от 10.06.2015 г.
4. Бурмистренко В.А., Богданович Э.М., Ванюрихин А.И., Гайлиш Э.П. Устройство для контроля точности автоколлиматоров. Авторское свидетельство СССР №560135, приоритет от 21.07.1975.
5. Коняхин И.Α., Ворона A.M. Экспериментальные исследования широко-диапазонного автоколлиматора // Научно-технический вестник СПбГУ ИТМО, выпуск 18, 2005, стр. 224-227.
6. Пинаев Л.В., Тихомирова Н.Л., Фирсов Н.Т., Пинаева Т.Д., Бакуев А.А. Фотоэлектрическое автоколлимационное устройство. Авторское свидетельство СССР №1737264А1, приоритет от 05.04.1990.
7. Жуков Ю.П., Ловчий И.Л., Пестов Ю.И., Сергеев В.А., Страдов Б.Г. Малогабаритный двухкоординатный цифровой автоколлиматор // Оптический журнал, т.86, 2019, №8, стр. 29-35.
8. Авенко М.И., Запрягаева Л.А., Свешникова И.С. Задачник по прикладной оптике: Учеб. пособие. - М.: Высш. шк., 2003. - 591 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| Фотоэлектрическое автоколлимационное устройство | 1990 |
|
SU1737264A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| Оптическое фотоэлектрическое устройство | 1990 |
|
SU1753444A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2602414C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
Изобретение относится к измерительной технике и может быть использовано в оптическом приборостроении, точном машиностроении, метрологии. Способ измерения перемещений изображения марки в цифровых автоколлиматорах включает в себя формирование изображения марки в виде растра из N+1 прозрачных параллельных щелей с монотонным дискретным изменением их ширин, идентификацию изображения щелей марки на приемнике, определение щели в марке, угол падения лучей от которой на отражатель относительно его нормали наиболее близок к 0, определение угла разворота отражателя по положению центра тяжести изображения этой щели на приемнике, коррекцию найденного угла разворота отражателя с использованием поправки, определяемой индивидуальными геометрическими и аберрационными параметрами объектива автоколлиматора. Технический результат заключается в многократном расширении диапазона измерений однокоординатного автоколлиматора с одновременным многократным снижением систематической погрешности измерений. 2 н.п. ф-лы, 7 ил.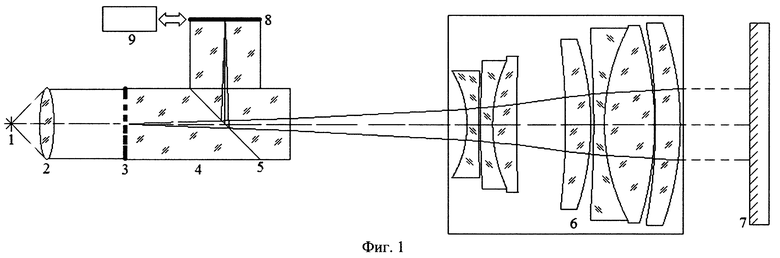
1. Способ измерения перемещений изображения марки в цифровых автоколлиматорах (АК), заключающийся в том, что изображение марки в виде растра штрихов формируют в плоскости многоэлементного приемника излучения, например ПЗС-линейки, отличающийся тем, что марку выбирают в виде растра из N+1 прозрачных параллельных щелей с монотонным дискретным изменением их ширин, ширину растра выбирают не более размера ПЗС-линейки, минимальные ширину щели и расстояние между соседними щелями выбирают в несколько раз больше размера пикселя ПЗС-линейки, идентифицируют изображения щелей марки на ПЗС-линейке, по положениям центров тяжести изображений щелей для каждого k-го изображения щели марки вычисляют ориентировочный угол ϕk разворота отражателя по формуле
где:
δk - сдвиг k-й щели в марке относительно ее центра, мм;
ЦТk - положение центра тяжести изображения k-й щели на ПЗС-линейке относительно ее центра при развороте отражателя на угол ϕ относительно визирной оси АК, мм;
F - фокусное расстояние объектива АК, мм,
для вычисленных ориентировочных углов разворота отражателя определяют среднее значение угла  , по величине сдвига δi, ближайшей к произведению F tan
, по величине сдвига δi, ближайшей к произведению F tan  , определяют i-ю щель в марке, угол падения световых лучей от которой на отражатель относительно его нормали наиболее близок к 0, вычисленное в соответствии с формулой значение угла ϕi для найденной щели марки используют в качестве величины измеренного угла, для уточнения этой величины применяют корректирующую поправку, определяемую индивидуальными геометрическими и аберрационными параметрами объектива автоколлиматора.
, определяют i-ю щель в марке, угол падения световых лучей от которой на отражатель относительно его нормали наиболее близок к 0, вычисленное в соответствии с формулой значение угла ϕi для найденной щели марки используют в качестве величины измеренного угла, для уточнения этой величины применяют корректирующую поправку, определяемую индивидуальными геометрическими и аберрационными параметрами объектива автоколлиматора.
2. Устройство для измерения перемещений изображения марки в цифровых автоколлиматорах, содержащее осветитель, марку в виде растра щелевых диафрагм, объектив, отражатель, установленный на контролируемом объекте, ПЗС-линейку, блок опроса ПЗС и электронный блок, отличающееся тем, что растр щелевых диафрагм выбран в виде растра из N+1 прозрачных параллельных щелей с монотонным дискретным изменением их ширин, размер растра выбран не более размера ПЗС-линейки, минимальные ширина щели и расстояние между соседними щелями выбраны в несколько раз больше размера пикселя ПЗС-линейки, блок опроса ПЗС и электронный блок выполнены в виде блока управления и обработки сигналов, определяющего величину измеряемого угла поворота отражателя с учетом корректирующей поправки, заложенной в его память.
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| Фотоэлектрический автоколлиматор | 1974 |
|
SU568034A1 |
| Автоколлимационное фотоэлектрическое устройство | 1980 |
|
SU968614A1 |

