(54) УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания структурных линий рельефа с кодированных географических карт | 1982 |
|
SU1037297A1 |
| Устройство для считывания графической информации | 1980 |
|
SU934511A1 |
| Устройство для считывания картографической информации | 1984 |
|
SU1241270A1 |
| Устройство для считывания графической информации | 1978 |
|
SU705482A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1015406A1 |
| Устройство для считывания рельефа с кодированных географических карт | 1982 |
|
SU1030817A2 |
| Устройство для считывания графической информации | 1983 |
|
SU1164753A1 |
| Устройство для считывания и обработки графической информации | 1976 |
|
SU714433A1 |
| Способ изготовления растрированных печатных форм и устройство для его осуществления | 1979 |
|
SU1463125A3 |
| Устройство для считывания графической информации | 1988 |
|
SU1606980A1 |
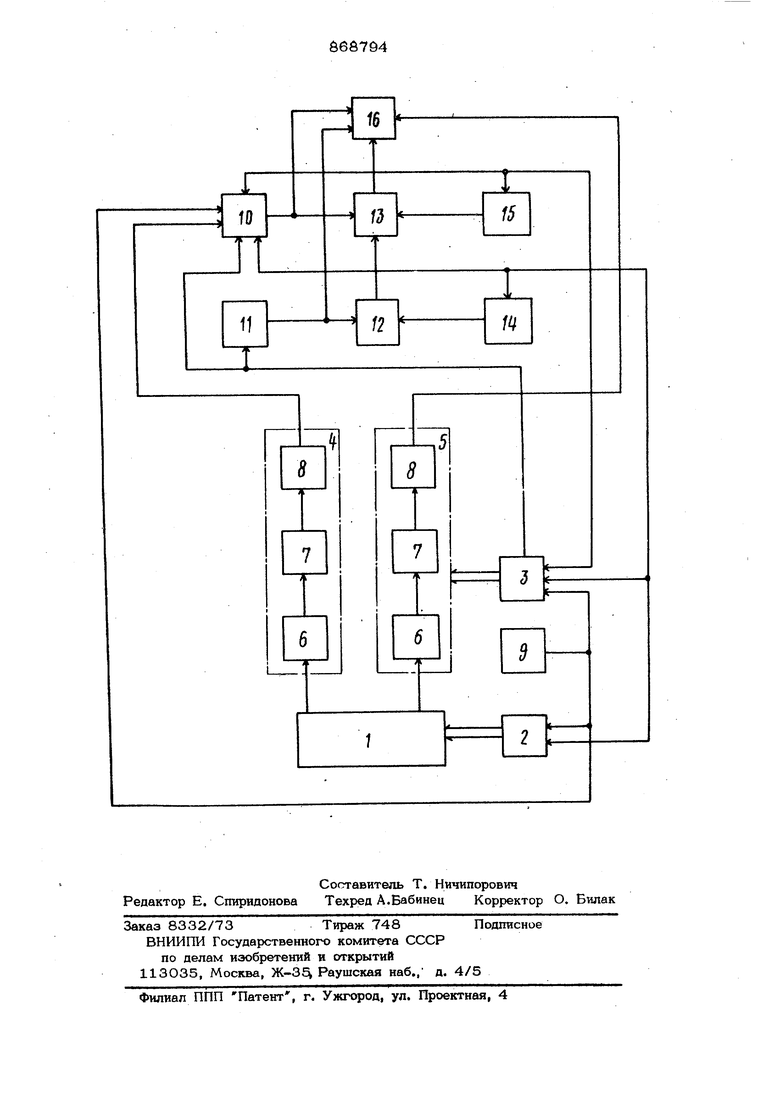
Изобретение относится к автомат11ке и вычислительной технике, в частности к устройствам для считывания графической информации, и может быть исполь зовано для автоматического считывания графической информации с топографических карт. Известны устройства для считывания графической информации l и 2 . Первое из известных устройств содержит блок считывания данных, оптичесди связанный с развертывающим барабаном и соединенный с блоком управления движения барабана, считыванием и перфорацией, блок определения и сравнения координат, входы которого соединены с блоком считы вания данных и блоком управления, а выход - с блоком перфорации Недостаток известного устройства, основанного на использовании шагового привода для вращения барабана, заключается в малом быстродействии и в невысокой разрешающей способности. Наиболее близко к предлагаемому устройство, содержащее развертывающий барабан, оптически связанный с датчиком видеосигналов, привод вращения барабана и привод перемещения второго датчика ви-. деосигналов, входы которых соединены с задающи1у1 генератором, счетчик координат X, подсоединенный к задающему генератору, первому датчику видеосигналов и к блоку регистрации, счетчик координат У, соединенный с приводом перемещения второго датчика видеосигналов, со счетчиком координат X и блоком регистрации, связанным со датчиком видеосигналов, регистры и блоки сравненуш координат 2. Недостаток его - сравнительно невысокая точность. Цель изобретения - повышение точное ти устройства. Поставленная цель достигается тем, что в устройстве, содержащем оптико-механический развертывающий блок, привод которого соединен с задающим генератором, подключенным к первому счетчику коврдинат, первый датчик видеосигналов, оптич&ски связанный с оптико-механическим развертывающим блоком и соедгшенный первым счетчиком координат, подключеннь м к блоку регистрации, второй датчик виде осигнадов, привод которого coeavi.ieH с за дающим генератором и с первым и вторым счетч-щсами координат, при этом вход второго датчика видеосигналов оптически связан с оптико-механ11ческим развертыва ющим блоком, а выход подключен к блоку регистрации, регистры и блоки сравнения, входы блоков сравнения соединены с соот ветствующими регистрами и счетчиками координат, а выходы подключены к первому счетчику координат, к приводу второго датчика видеосигналов и к соответствующим регистрам, при этом первый блок сравнения соединен со вторым блоком сравнения, выход которого подключен к блоку регистрации. На чертеже представлена блок-схема устройства. При этом электрические связи показань сплощными линиями, оптические связи пунктирными, а механические - двойными линиями, Устройства содержит оптико-механичеCKViii развертывающий блок 1, выполненны например, в Е1иде развертывающего бараба на, привод 2 вращения барабана, привод перемещения второго датчика видеосигналов 3, первый и второй 4 и 5 датчики видеосигналов, содержащие фокусирующие элементы 6, фотоприемники 7 и формирователи В видеосигналов,, задающий генера тор 9, первый счетчик 10 координат,, второй счетч 1к 11 координат, первый блок 12 сравнения координат, второй бло 13 сравнения координат, регистры 14 и 15 и блок 16 регистрации. Устройство работает следующим образом, На барабан 1 крепится носитель графической информации (не показан) таким образом, чтобы метка начала координат X в виде тонкой опорной линии, являющейся продолжением оси У, при вращении барабана попадала в поле зрения первого датчика 4 видеосигналов, который по отношению к развертывающему барабану за реплен жестко и в процессе считывания информации остается неподвижным. Втсфо датчик видеосигналов 5, который перемещается по оси У с заданным шагом при помощи шагового привода 3, устанавлива ется оператором в начальную точку считываемой информации, координаты которо . На регистрах 14 и 15 оператором наираются начальные и конечные значения координат, определяющие параметры сканируемой лрямоугольной площади. В приводе перемещения датчика 3 видеосигналов устанавливается выбранное значение величины щага перемещения датчика. Включается вращение развертывающего барабаОтраженный световой поток от поверхности носителя графической информации через фокусирующие элементы 6 попадает на фотоприемники 7, с выхода которых электрические сигналы поступают в формиро ватели 8 видеосигналов, где формируются управляющие импульсы для работы схемы устройства. При номинальных оборотах развертывающего барабана осуи1ествляе1 ся пуск устройства. При этом разрешается работа первого блока 12 сравнения коор-; динат. Если текущая ордината не равна начальной, то по с гналу с блока 12 приводом 3 осуществляется перемещение цат чика 5 видеосигналов с суммированием импульсов с выхода привода 3 в счетчике 11 координат. При равенстве упомянутых ординат по сигналу с первого блока 12 сравнения координат останавливается перемещение датчика видеосигналов 5 и к блоку 12 сравнения координат подключается регистр 14 с записанным значением ординат, а также разрещается работа перього счетчика 10 координат и второго блока 13 сравнения координат. По сигналу с первого датчика 4 видеосигналов, возникающего в момент пересечения оптической осью датчика опорной линии в счетчкз е 10 значения X предварительно сбрасываются в О и происход11Т подсчет и масштабирование импульсов, поступающих на вход счетчика 10 с задающего генератора 9. Во втором блоке 13 сравнения координат происходит сравнение каждого текущего значения координат О, полученных в счетчике 1О, со значением координаты X, записанным в регистре 15. В момент, когда будет выполнено условие равенства координат, в блоке 13 начинается сравнение каждого значения координат X, поступающих на его вход со, счетчика 10, со значением координаты X, записанным в регистре 15, а также разрещается работа блока 16 регистрации. . В этом случае в момент пересечения оптической осью второго датчика 5 видеосигналов линии считьгоаемого графика в блоке 16 регистрации по сигналу с дат чика 5 произойдет регистрация текущих значений координат X и У, поступающих на вход блока 16 со счетчика коораинат, X 10 и счетчика координат 11. Регистрация координат считываемой ин формации будет осуществляться до тех пор, пока не будет выполнено условие ра.венства текущих координат граничным. При наступлении момента равенства по сигнал с блока сравнения координат 13 запрещае ся работа счетчтеа 10 и блока 16. По этому же сигналу дается команда на пере мещение датчика видеосигналов 5 на заданную величину с подсуммированием импульсов с привода 3 в счетчике координат 11. Таким образом завершается считывание информации первой строки. После перемещения датчика видеосигналов 5 по сигналу с привода 3 вновь ргазрешается работа счетчика координат (Х)1О. По сигналу с датчУ1ка видеосигналов 4 значения записанных координат в счетчике 10 сбрасываются в О и начинается формирование новых значений координат X. Когда значение X станет равным начальному значению, разрешается регистрация информации до момента наступления равенства граничному значению координ 1Т. Сравнение , координат производится в блоке 13 сравнения координат таким же образом, как и при считывании информации по первой строке сканирования В дальнейшем работа схемы повторяется. В момент наступления равенства текущих ординат граничным по сигналу с блока 12 сравнения координат У, работа всего устройства прекращается. В итоге в блоке регистрации 16 последовательно будут зарегистрированы все значения координат X и У точек пересечения оптической осью второго датчика 5 видеосигналов с линиями считываемой графической информации на площади, заданной определенными координатами. Введение новых конструктивных связей позволяет не толысо расширить функциональные возможности устройства, но и существенно псюысить его точность. Формула изобретенпа Устройство для считывания графической информации, содержащее оптико-механический развертывакнций блок, привод соединен с задающим генератором, подключенным к первому счетчику координат, первый датчик видеосигналов, оптически связанный с оптико-механическим развертывающим блоком и соединенный с первым счетчиком координат, подключенным к блоку регистрации, второй датчик видеосигналов, привод которетч) соединен с задающим генераторе и с первым и вторым счетчиками координат, при этом вход второго датчика видеосщ налов оптически связан с оптико-механическим развертывающим блоком, а выход подключен к блоку регистрации, регистры и блоки сравнения, отличающееся тем, что, с целью повыщения точ- ности устройства, в нем входы блоков сравнения соединены с соответствующими регистрами и счетчиками координат, а выходы подключены к первому счетчику координат, к приводу второго датчика видеосигналов и к соответствующим регистрам, при этом пермлй блок сравивния соединен со вторым блоком сравнения, выход которого подключен к блоку регистраци:кИсточники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СХСР № 208345, кл. Q Об К 9/00, 1968. 2.Патент Японии № 5О-19144, кл. 97/7/622, опублик. 1975 (прототип).
