(54) ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД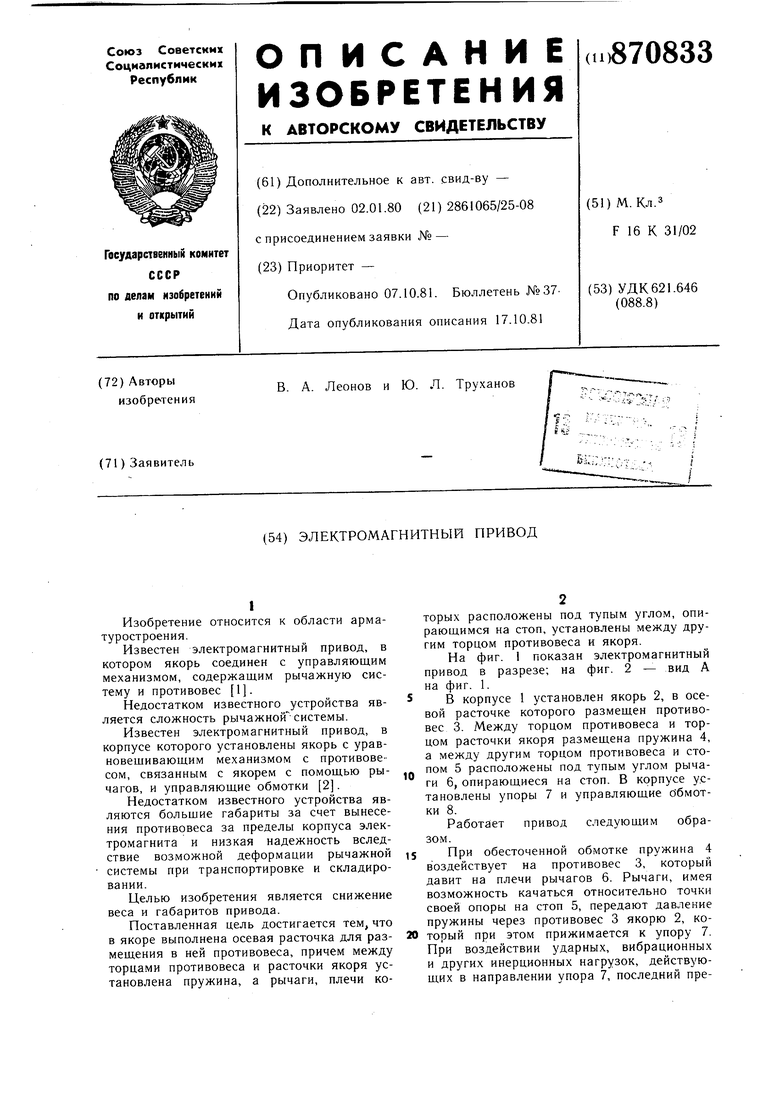
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАН | 1992 |
|
RU2046239C1 |
| Распределитель с электромагнитным приводом | 1988 |
|
SU1605073A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2002 |
|
RU2227237C2 |
| ЭЛЕКТРОПНЕВМОКЛАПАН | 1999 |
|
RU2159383C1 |
| ЭЛЕКТРОПНЕВМОКЛАПАН | 2001 |
|
RU2205312C2 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2366065C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН ПНЕВМОРАСПРЕДЕЛИТЕЛЯ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242663C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАН | 1992 |
|
RU2046238C1 |
| КОНТАКТОР ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2488907C2 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН ДЛЯ ДОЗИРОВАНИЯ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2198316C2 |
1
Изобретение относится к области арматуростроения.
Известен электромагнитный привод, в котором якорь соединен с управляющим механизмом, содержащим рычажную систему и противовес 1.
Недостатком известного устройства является сложность рычажной системы.
Известен электромагнитный привод, в корпусе которого установлены якорь с уравновешивающим ме.ханизмом с противовесом, связанным с якорем с помощью рычагов, и управляющие обмотки 2.
Недостатком известного устройства являются большие габариты за счет вынесения противовеса за пределы корпуса электромагнита и низкая надежность вследствие возможной деформации рычажной системы при транспортировке и складировании.
Целью изобретения является снижение веса и габаритов привода.
Поставленная цель достигается тем,что в якоре выполнена осевая расточка для размещения в ней противовеса, причем между торцами противовеса и расточки якоря установлена пружина, а рычаги, плечи которых расположены под тупым углом, опирающимся на стоп, установлены между другим торцом противовеса и якоря.
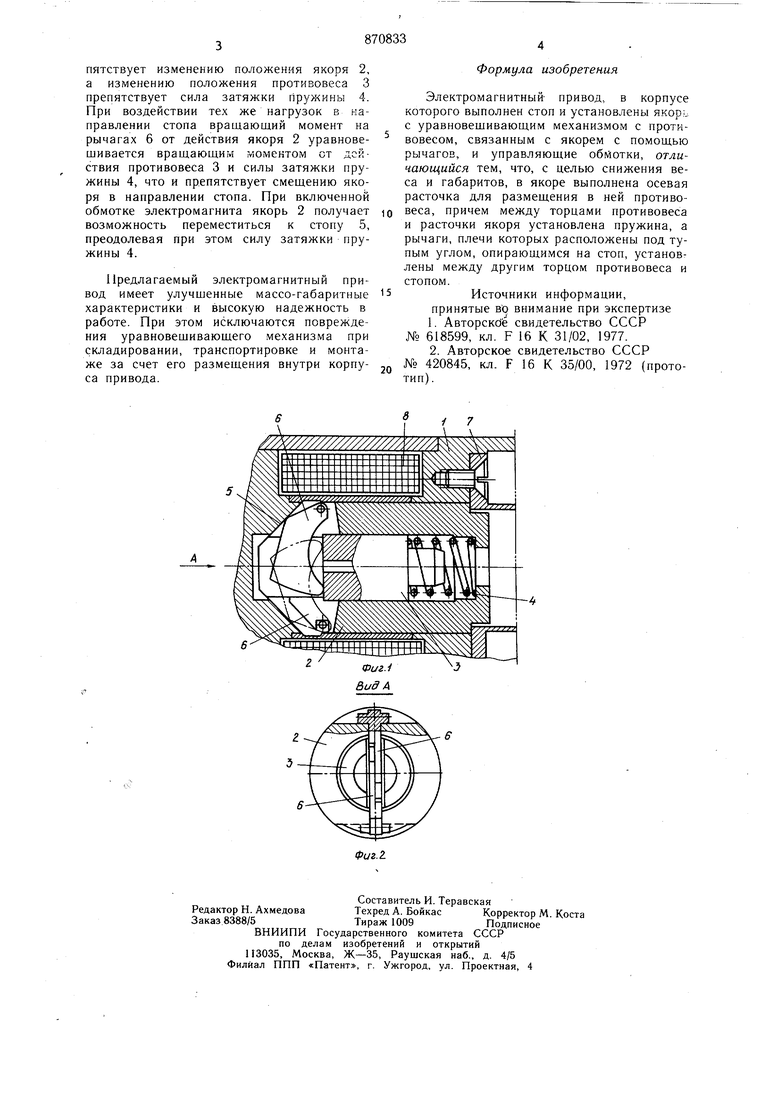
На фиг. 1 показан электромагнитный привод в разрезе; на фиг. 2 - вид А на фиг. 1.
В корпусе 1 установлен якорь 2, в осевой расточке которого размещен противовес 3. Между торцом противовеса и торцом расточки якоря размещена пружина 4, а между другим торцом противовеса и стопом 5 расположены под тупым углом рыча10ги 6, опирающиеся на стоп. В корпусе установлены упоры 7 и управляющие Обмотки 8.
Работает привод следующим образом.
При обесточенной обмотке пружина 4
15 воздействует на противовес 3, который давит на плечи рычагов 6. Рычаги, имея возможность качаться относительно точки своей опоры на стоп 5, передают давление пружины через противовес 3 якорю 2, который при этом прижимается к упору 7. При воздействии ударных, вибрационных и других инерционных нагрузок, действующих в направлении упора 7, последний пре
