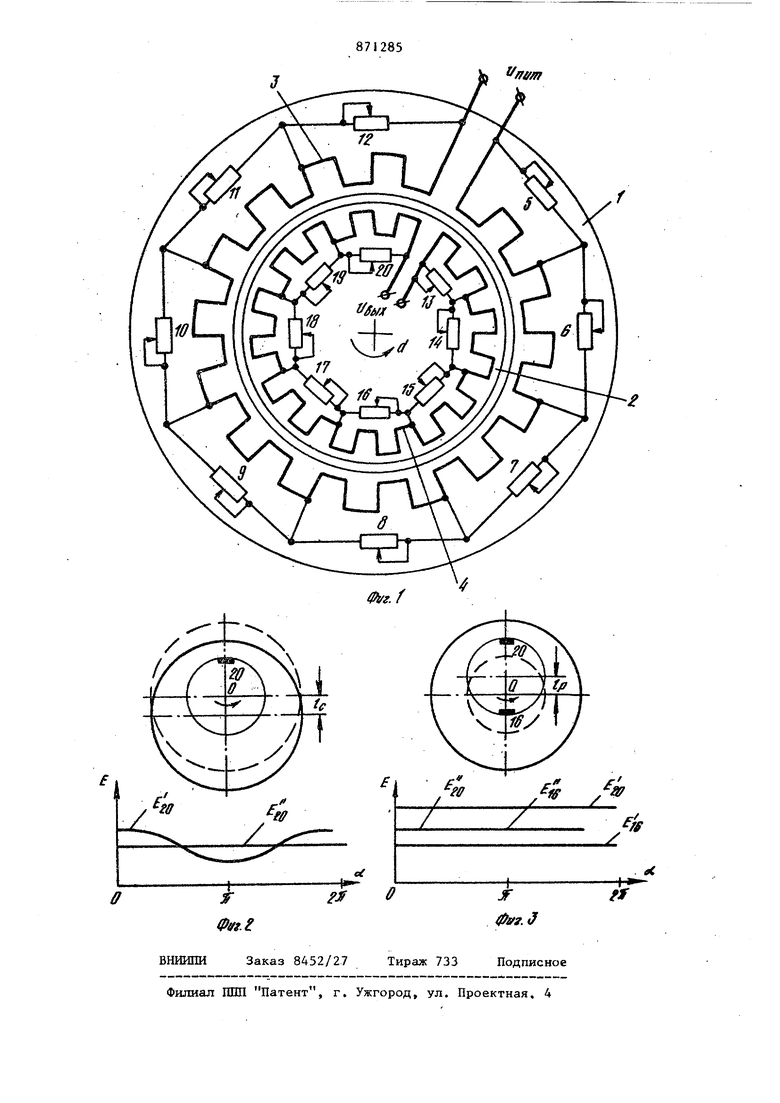
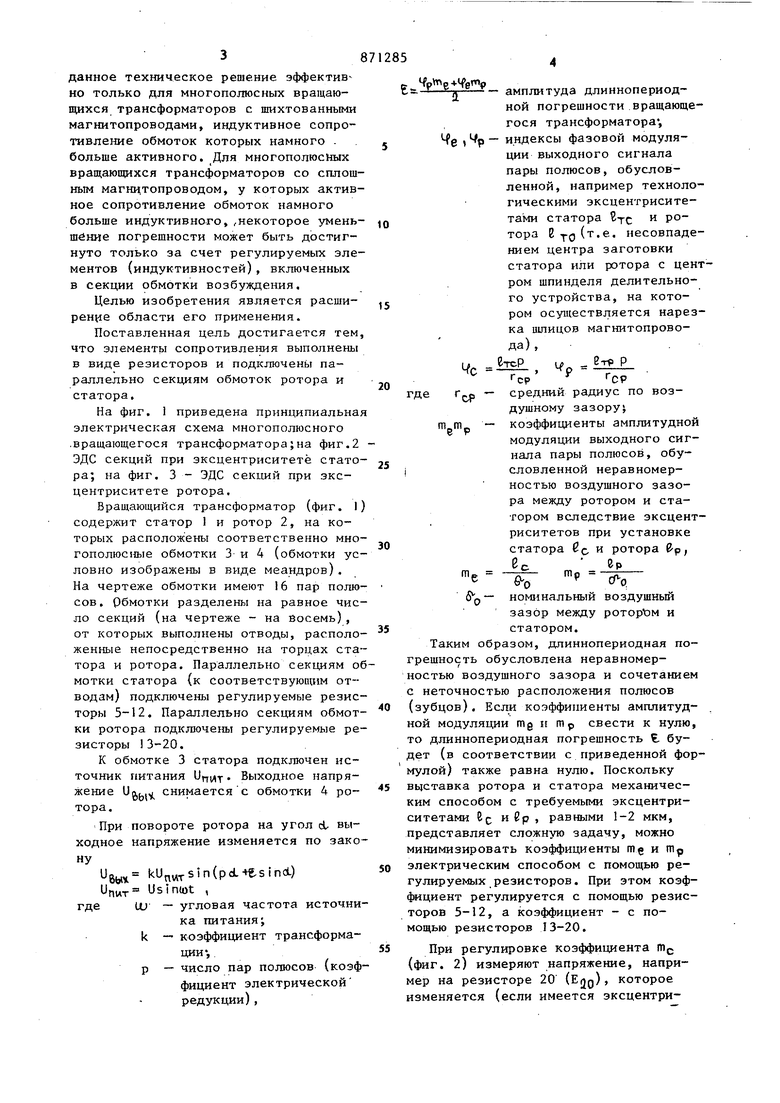
Изобретение относится к автоматике и может быть использовано в высокоточ ных системах измерения и передачи угл поворота. В настоящее время широко известны многополюсные вращающиеся трансформаторы, содержащие зубчатые цилиндрические ротор и. статор, в пазах которых помещены приемные обмотки и обмот ки возбуждения. Основной погрешностью современных вращающихся трансформаторов является погрешность, обусловленная неравномерностью воздушного зазора между ротором и статором и изменяющаяся с периодом оборота ротора (длиннопериодная погрешность). Неравномерность воздушного зазора возникает вследствие эксцентриситетов установки и овальности ротора и статора. Для автокомпенсации длиннопериодной погрешности используется стабилизация выходных сигналов отдельных секций выходной обмотки с последующим сложением стабилизированных сигналов. Устройство Ui характеризуется по вышенной сложностью ввиду большого количества злектронных стабилизаторов. Это ограничивает использование вращающегося трансформатора режимом фазовращателя. Известны также вращающиеся трансформаторы, в которых автокомпенсация длиннопериодной погрешности достигается использованием обмотки возбуждения вращающегося трансформатора, также разделенной на секции, которые подключены параллельно к источнику питания. Последовательно с каждой секцией включены элементы сопротивления, выполненные в виде регулируемых индуктйвностей Г2 . Недостаток данного устройства заключается в том, что автокомпенсация погрешности осуществляется наиболее полно при достаточно высокой добротности обмотки возбуждения. Поэтому 3 данное техническое решение эффективно только для многополюсных вращающихся трансформаторов с шихтованными магнитопроводами, индуктивное сопротивление обмоток которых намного . больше активного. Для многополюсных вращающихся трансформаторов со сплошным магнцтопроводом, у которых активное сопротивление обмоток намного больше индуктивного, ,некоторое уменьшение погрешности может быть достигнуто только за счет регулируемых элементов (индуктивностей), включенных в секции обмотки возбуждения. Целью изобретения является расшиpeHvie области его применения. Поставленная цель достигается тем что элементы сопротивления выполнены в виде резисторов и подключены параллельно секциям обмоток ротора и статора. На фиг. 1 приведена принципиальна электрическая схема многополюсного .вращающегося трансформатора;на фиг.2 ЭДС секций при эксцентриситете стато ра; на фиг. 3 - ЭДС секций при эксцентриситете ротора. Вращающийся трансформатор (фиг. I содержит статор 1 и ротор 2, на которых расположены соответственно мно гополюсные обмотки 3 и 4 (обмотки ус ловно изображены в виде меандров). На чертеже обмотки имеют 16 пар полю сов. Обмотки разделены на равное чис ло секций (на чертеже - на Восемь), от которых выполнены отводы, располо женные непосредственно на торцах ста тора и ротора. Параллельно секциям о мотки статора (к соответствующим отводам) подключены регулируемые резис торы 5-12. Параллельно секциям обмот ки ротора подключены регулируемые ре зисторы 3-20. К обмотке 3 статора подключен источник питания УПИТ Выходное напряжение Ujj,. снимаетсяс обмотки 4 ротора. При повороте ротора на угол d, выходное напряжение изменяется по зако ну Ugy kUnviTsin(pcL+esin(t) -пит Ustnwt , где LU - угловая частота источни ка питания; k - коэффициент трансформации-, р - число пар полюсов (коэф фициент электрической редукции), ЧрЬр+Не р г .г- амплитуда длиннопериодной погрешности вращающегося трансформатора, Че , индексы фазовой модуляции выходного сигнала пары полюсов, обусловленной, например технологическими эксцентриситетами статора Р° тора В YO( несовпадением центра заготовки статора или ротора с центром шпинделя делительного устройства, на котором осуществляется нарезка шлицов магнитопровода) , С. r - средний радиус по воздушному зазоруJ коэффициенты амплитудной модуляции выходного сигнала пары полюсов, обусловленной неравномерностью воздушного зазора между ротором и статором вследствие эксцентриситетов при установке статора Со и ротора &р, Вс n, -Q 0. - номинальный воздушньй зазор между роторЪм и статором. Таким образом, длиннопериодная погрешность обусловлена неравномерностью воздушного зазора и сочетанием с неточностью расположения полюсов (зубцов). Если коэффипиенты амплитудной модуляции mg и гпр свести к нулю, то длиннопериодная погрешность . будет (в соответствии с приведенной формулой) также равна нулю. Поскольку выставка ротора и статора механическим способом с требуемыми эксцентриситетами бр и Ср , равными 1-2 мкм, представляет сложную задачу, можно минимизировать коэффициенты mg и Шр электрическим способом с помощью регулируемых резисторов. При этом коэф(|мциент регулируется с помощью резисторов 5-12, а коэффициент - с помощью резисторов 13-20. При регулировке коэффициента mj. (фиг. 2) измеряют напряжение, например на резисторе 20 (EIJQ) которое изменяется (если имеется эксцентриситет 6t) по синусоидальному закону с периодом оборота ротора 20Г. Регулировкой резисторов 5-12 на статоре добиваются минимального изменения на пряжения Ejp на резисторе 20. При регулировке коэффициента гпр (фиг. 3) измеряют постоянные, независящие от угла поворота напряжения, например на резисторах 16 и 20. В сл чае эксцентриситета &р напряжения E и Ego отличаются по амплитуде. Регулировкой резисторов 16 и 20 и:: устанавливают равными (Е(, E-jp). Таким же образом выравнивают напряжения на остальных резисторах ротора. В результате длиннопериодная погрешность, обусловленная неравномерностью воздушного зазора из-за эксцентриситета установки статора и ротора, компенсируется выравниванием напряжений отдельных секций выходной .обмотки. Эффективность такой компенсации зависит от числа секций обмото Так, при четырех секциях погрешность уменьшается в 5 раз, при восьми в 20 раз. Если у вращающегося трансформатора наряду с одной выходной (синусной обмоткой имеется другая (косинусная) обмотка, то для компенсации длиннопериодной погрешности второй обмотки необходимо ввести дополнительные регулируемые резисторы для каждой секции этой обмотки. Следует отметить, что в отличие от способа автокомпенсации длиннопериодной погрешности, даниое техническое решение -касается обычной компенсации, т.е. эффективно при стабильных эксцентриситетах Сс и Йр . Однако оно не требует сложных электронных стабилизаторов и ряда дополнительных подвижных токосъемных устройств на вращающемся роторе, так как регулируемые резисторы расположены непосредственно на корпусах ротора и статора. Данный многополюсный вращающийся трансформатор обеспечивает повьш1ение точности (при сплошных магнитопрово,дах ротора и статора) в несколько раз относительно простыми средствами без усложнения технологии изготовления. Формула изобретения Многополюсный вращающийся трансформатор, содержащий статор и ротор с ceкциoниpoвaн и lми обмотками и подключенные к обмоткам регулируемые элементы сопротивления, отличающийся тем, что, с целью расширения области его применения, элементы сопротивления выполнены в виде резисторов и подключены параллельно секциям обмоток. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 708141, кл. G О В 7/10, 1977. 2.Авторское свидетельство СССР по заявке № 2745020/24-07, кл. Н 02 К 24/00, 1979.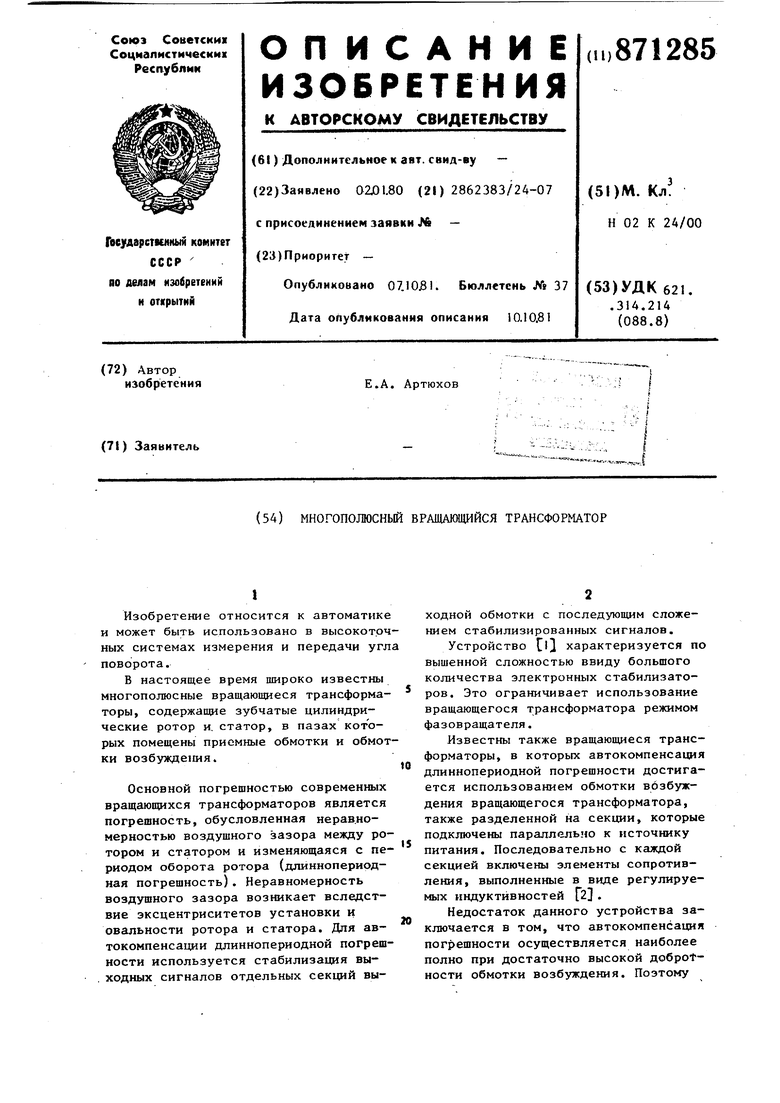
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угол-фаза | 1977 |
|
SU734506A1 |
| Многополюсный вращающийся трансформатор | 1980 |
|
SU898565A2 |
| Многополюсный вращающийсяТРАНСфОРМАТОР | 1979 |
|
SU799084A1 |
| Преобразователь угол-фаза | 1977 |
|
SU708141A1 |
| Преобразователь угла поворота вала в фазовый сдвиг | 1979 |
|
SU855396A1 |
| Индукционный датчик угла | 1974 |
|
SU521636A1 |
| Многополюсный вращающийся трансформатор | 1981 |
|
SU1001343A1 |
| Многополюсный вращающийся трансформатор | 1977 |
|
SU692012A1 |
| Многополюсный вращающийся трансформатор | 1981 |
|
SU961056A1 |
| Двухканальный датчик угловыхпЕРЕМЕщЕНий | 1979 |
|
SU853377A2 |