(54) ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ФАЗОВЫЙ СДВИГ
1
Изобретение относится к системам автоматического контроля и преобразования перемещений, а именно к преобразователям угла поворота вала в фазовый сдвиг.
Известны преобразователи угла поворота вала в код, содержащие многополюсные вращающиеся трансформаторы, в которых измеряемому сдвигу фазы ставится в соответствие с эталонным сдвиг фазы, полученный с компенсационного фазовраща- , теля (например, имеющего цифровой выход). Сдвиг фазы компенсационного фазо- Q вращателя изменяется до устранения рассогласования между измеряемым и эталонным сдвигами фаз, обнаруживаемого с помощью фазового дискриминатора. Выходной код компенсационного фазовращателя соответствует измеряемому сдвигу фаз 1. 15
Недостатком таких устройств является погрещность, обусловленная эксцентриситетами установки ротора и статора датчика в сочетании с недостаточностью нарезки щлицов и дефектами формы рабочих поверх- 2 ностей ротора и статора. В процессе эксплуатации возможны нерабочие смещения
ротора и статора, что вызывает дополнительную погрещность системы.
Наиболее близким по технической сущности к предлагаемому является преобразователь угла поворота вала в фазовый сдвиг, содержащий многополюсный фазовращательный датчик угла с выходной обмоткой, компенсационный фазовращатель и фазовый дискриминатор в виде ключа и низкочастотного фильтра. Входы фазового дискриминатора подключены к компенсационному фазовращателю и выходной обмотке фазовращательного датчика, а выход - к исполнительному устройству (например, двигателю) компенсационного фазовращателя 2.
Недостатком известной системы явллется ограничение точности допусками на установку и нерабочие смещения ротора и статора многополюсного датчика.
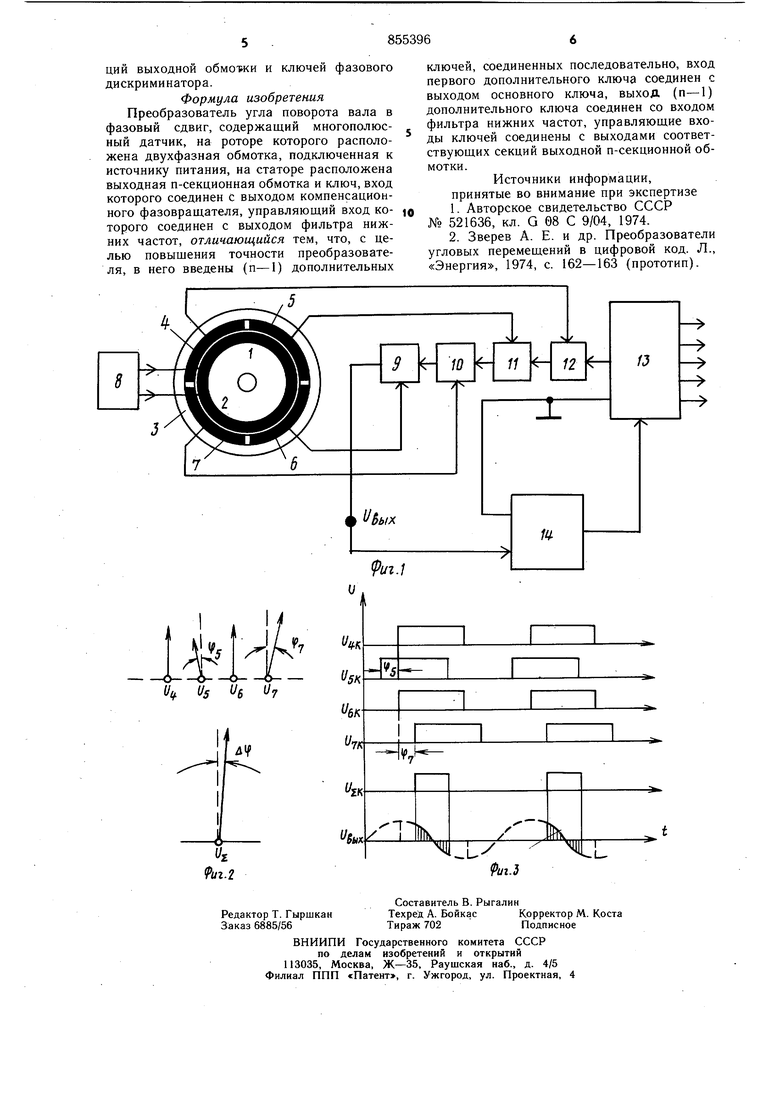
Цель изобретения - повыщение точности преобразователя угла поворота вала в фазовый сдвиг за счет автокомпенсации длиннопериодной погрещности, обусловленной дефектами монтажа ротора и статора йногополюсного фазовращательного датчика. Поставленная цель достигается тем, что в преобразователь угла поворота вала в фазовый сдвиг, содержащий многополюсньш датчик, на роторе которого расположена двухфазная обмотка, подключенная к источнику питания, на статоре расположена выходная П-секционная обмотка и ключ, вход которого соединен с выходом компенсационного фазовращателя, управляющий .вход которого соединен с выходом фильтра нижних частот, введены (п-1) дополнительных ключей, соединенных последовательно, вход первого дополнительного ключа соединен с выходом основного ключа, выход (п-) дополнительного ключа соединен со входом фильтра нижних частот, управляющие входы ключей соединены с выходами соответствующих секций выходной п-секционной обмотки. На фиг. 1 представлена структурная схема преобразователя угла поворота вала в фазовый сдвиг; на фиг. 2 - расположение векторов напряжений на секциях выходной, обмотки; на фиг. 3 - временные диаграммы коммутационных функций с соответствующими погрешностями. Преобразователь угла поворота вала в фазовый сдвиг содержит многополюсный датчик с ротором 1, на котором размещена двухфазная обмотка 2 {показаны зачерненными участками) и статором 3, на котором помещена выходная обмотка, разделенная на п секций (на фиг. 1 обмотка разделена на четыре секции 4, 5, 6 и 7). Двухфазная обмотка 2 ротора подключена соответственно к двухфазному источнику 8 питания. Секции 4, 5, 6 и 7 выходной обмотки многополюсного датчика подключены соответственно к управляемым входам п ключей (на фиг. 1 четыре 9, 10, 11 и 12), которые включены последовательно и представляют собой фазовый дискриминатор, вход ключа 12 подключен к компенсационному фазовращателю 13, а выход через фильтр нижних частот 14 - к исполнительному устройству (например, двигателю) компенсационного фазовращателя 13, С выхода компенсационного фазовращателя 13 снимается цифровой код, эквивалентный углу поворота ротора 1 многополюсного дат.чика. Преобразователь работает следующим образом. При питании обмотки 2 ротора 1 двух фазным напряжением от источника 8 питания с секций 4-7 выходной обмотки снимаются выходные напряжения, фаза которых изменяется пропорционально углу поворота ротора 1 с электрической редукцией р, где р - число пар полюсов многополюсного датчика. Если во время нарезки, например, шлицов статора допущена несоосность центра заготовки с осью щпинделя станка (технологический эксцентриситет), то даже при точной установке ротора и статора датчика в изделие выходные напряжения и, Uj-, Ug и Ur (фиг. 2), снимаемые с секций 4-7 обмотки статора, имеют фазовые (угловые) погрешности /-(ffl, если технологический эксцентриситет статора задан по оси, проходящей через центры секций 4 и 6 (при этом векторы иди и б не имеют фазовых погрешностей). При задании эксцентриситета установки ротора по оси, проходящей через центры секций 5 и 7, амплитуды векторов Uf и UT различны. В результате при суммировании (т. е. последовательном соединении секций) векторов U, Ug, Ue и Ur возникает погрешность Дф углового отклонения суммарного вектора J, которая определяется по формуле .Л. sinoL , 1/0 где If - эксцентриситет установки ротора; to- технологический эксцентриситет статора; U(y - выходной сигнал пары полюсов обмотки при номинальном зазоре между ротором и статором; К - крутизна характеристики зазор-сигнал в точке номинального зазора; at - угол поворота ротора; dcp - средний диаметр зазора между статором и ротором. В данном преобразователе векторы U4, Ug, Us и и/ (фиг. 2) являются векторами коммутаций соответственно ключей 12, 11, 9 и 10. Поскольку данные коммутационные функ-ции не зависят от амплитуды векторов коммутации, а /cps/ /-фтА суммарная коммутационная функция Uji (получающаяся вследствие последовательного соединения ключей) не имеет фазовой (угловой) погрещности. В результате выходные напряжения ключей Овых. (заштрихованные участки фиг. 3) не содержат постоянной составляющей, пропорциональной погрещности Дер в известном. Переменная составляющая ивык. сглаживается фильтром 14. Напряжение с выхода фильтра, пропорциональное рассогласованию между углом поворота фазовращательного датчика и фазовым углом выходного напряжения компенсационного фазовращателя 13, воздействует на исполнительное устройство (например, двигатель) компенсационного фазовращателя. Исполнительное устройство устанавливает соответствие фаз напряжений фазовращательного датчика и компенсационного фазовращателя. При этом код на выходе компенсационного фазовращателя соответствует углу поворота датчика. Точность компенсации длиннопериодной погрещности многополюсного фазовращательного датчика в предлагаемой фазовой следящей системе определяется числом п сек

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угол-фаза | 1977 |
|
SU708141A1 |
| Преобразователь угол-фаза | 1977 |
|
SU734506A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Фазовая следящая система | 1974 |
|
SU552587A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU720452A1 |
| Индукционный датчик угла | 1974 |
|
SU521636A1 |
| Фазовая система преобразования угла поворота в код | 1974 |
|
SU567163A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
