(54) РЕГУЛЯТОР ДАВЛЕНИЯ
1
Изобретение относится к регуляторам давления прямого действия и может быть использовано для регулирования давления, например, в электрохимическом генераторе тока.
По основному авт.св. № 346%J3 известен регулятор давления, содержащий расположенные в корпусе регулирующий клапан, соединенный с подпружиненньм чувствительным элементом, входной и выходной патрубки, постоянный магнит и подвижной якорь, через шток связанный с чувствительным элементом 1.
Недостатком известного регулятора давления является сложности и неудобство настройки регулятора при изменении жесткости пружин в партии регуляторов с одинаковыми номинальными размерами пружин, что обусловлено допускаемыми отклонениями от номинальных размеров пружин при их изготовлении. Жесткость пружин определяется следующей формулой
J G-d С„р-- X ; и
где Срр - жесткость пружины; d - диаметр проволоки; D - средний диаметр пружины;
и - число витков пружины; Q - модуль упругости первого
рода;
X - эластичность пружины. Разме{%1 d и D имеют колебания в пределах поля допуска на изготовление. Учитывая это, можно сделать вывод, что величина С„р для партии регуляторов с одинаковыми номиналь10ными размерами пружин будет различной после изготовления. Для того, чтобы выдержать соотношение при , исходя из того, что
(СПР-СМ)
15
,Р-F
где лР - изменение выходного давления;
С - жесткость магнитной системы; 20 СПР - жесткость пружины;
I) - перемещение клапана; F - эффективная площадь действия выходного давления необходимо для каждого регулятора в 25 пapти регуляторов с одинаковыми номинальными размерами регулировать жесткость магнитной системы (С) при настройке регулятора.
Цель изобретения - повышение точности регулятора.
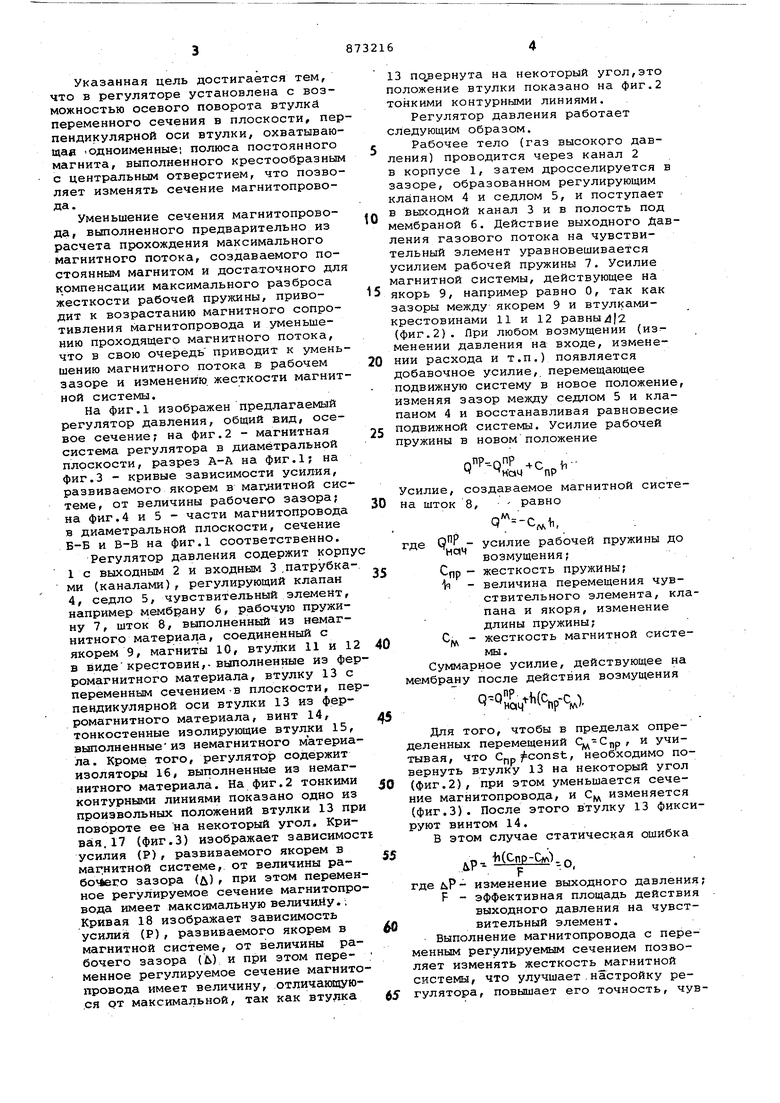
Указанная цель достигается тем, что в регуляторе установлена с возможностью осевого поворота втулка переменного сечения в плоскости, перпендикулярной оси втулки, охватывающая Одноименные полюса постоянного магнита, выполненного крестообразным с центральным отверстием, что позволяет изменять сечение магнитопровода.
Уменьшение сечения магнитопровода, выполненного предварительно из расчета прохождения максимального магнитного потока, создаваемого постоянным магнитом и достаточного для компенсации максимального разброса жесткости рабочей пружины, приводит к возрастанию магнитного сопротивления магнитопровода и уменьшению проходящего магнитного потока, что в свою очередь приводит к уменьшению магнитного потока в рабочем зазоре и изменению, жесткости магнитной системы.
На фиг.1 изображен предлагаемый регулятор давления, общий вид, осевое сечение; на фиг.2 - магнитная система регулятора в диаметральной плоскости, разрез А-А на фиг.1; на фиг.З - кривые зависимости усилия, развиваемого якорем в маглитной , от величины рабочего зазора; на фиг.4 и 5 - части магнитопровода в диаметральной плоскости, сечение Б-Б и В-В на фиг.1 соответственно.
Регулятор давления содержит корпу 1 с выходным 2 и входным 3 .патрубками (каналами), регулирующий клапан 4, седло 5, чувствительный элемент, например мембрану 6, рабочую пружину 7, шток 8, выполненный из немагнитного материала, соединенный с якорем 9, магниты 10, втулки 11 и 12 в видекрестовин,-выполненные из ферромагнитного материала, втулку 13 с переменным сечением-в плоскости, перпендикулярной оси втулки 13 из ферромагнитного материала, винт 14, тонкостенные изолирующие втулки 15, выполненные из немагнитного материала. Кроме того, регулятор содержит изоляторы 16I выполненные из немагнитного материала. На фиг.2 тонкими контурными линиями показано одно из произвольных положений втулки 13 при повороте ее на некоторый угол. Кривая, 17 (фиг.З) изображает зависимос усилия (Р), развиваемого якорем в магнитной системе, от величины рабo teгo зазора (д), при этом переменное регулируемое сечение магнитопровода имеет максимальную величийу.. Кривая 18 изображает зависимость усилия (Р), развиваемого якорем в магнитной системе, от величины рабочего зазора (Ь) и при этом переменное регулируемое сечение магнитопровода имеет величину, отличающуюся QT максимальной, так как втулка
13 повернута на некоторый угол,это положение втулки показано на фиг.2 тонкими контурНЕлми линиями.
Регулятор давления работает следующим образом.
Рабочее тело (газ высокого давления) проводится через канал 2 в корпусе 1, затем дросселируется в зазоре, образованном регулирующим клапаном 4 и седлом 5, и поступает в выходной канал 3 и в полость под мембраной б. Действие выходного Давления газового потока на чувствительный элемент уравновешивается усилием рабочей пружины 7. Усилие магнитной системы, действующее на якорь 9, например равно О, так как зазоры между якорем 9 и втулкамикрестовинами 11 и 12 равны/1|2 (фиг.2). При любом возмущении (из менении давления на входе, изменении расхода и т.п.) появляется добавочное усилие, перемещающее подвижную систему в новое положение изменяя зазор между седлом 5 и клапаном 4 и восстанавливая равновесие подвижной системы. Усилие рабочей пружины в новом положение
дПр-.рПр .. НЪМ ПР
Усилие, создаваемое магнитной систена шток 8, равно
- 11где усилие рабочей пружины до
возмущения; СПР - жесткость пружины;
1ч величина перемещения чувствительного элемента, клпана и якоря, изменение длины пружины;
CNS жесткость магнитной системы.
Суммарное усилие, действующее на мембрану после действия возмущения
,P-C).
Р fA
Для того, чтобы в пределах определенных перемещений , и учитывая, что Cfjpfconst, необходимо повернуть втулку 13 на некоторый угол (фиг.З), при этом уменьшается сечение магнитопровода, и С изменяется (фиг.З). После этого втулку 13 фиксируют винтом 14.
В этом случае статическая ошибка
др-.1(Мл.О.
где Р - изменение выходного давления F - эффективная площадь действия выходного давления на чувствительный элемент. Выполнение магнитопровода с переменным регулируемым сечением позволяет изменять жесткость магнитной системы, что улучшает.настройку регулятора, повышает его точность, чув

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1972 |
|
SU346713A1 |
| КЛАПАН ПЕРЕПУСКНОЙ С МАГНИТНОЙ ФИКСАЦИЕЙ И АВАРИЙНЫМ СБРОСОМ | 2006 |
|
RU2329427C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН ДЛЯ ГИДРОУПРАВЛЯЕМОЙ ТОПЛИВНОЙ ФОРСУНКИ | 2011 |
|
RU2541483C1 |
| КЛАПАН ПЕРЕПУСКНОЙ ДИСКРЕТНОГО ДЕЙСТВИЯ С МАГНИТНОЙ ФИКСАЦИЕЙ, РАЗГРУЗКОЙ И КОНТРОЛЕМ ПОЛОЖЕНИЯ | 2009 |
|
RU2424461C1 |
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 1997 |
|
RU2133546C1 |
| КЛАПАН МАГНИТОРЕГУЛИРУЕМЫЙ (ВАРИАНТЫ) | 2005 |
|
RU2307279C2 |
| Электромагнитный регулятор расхода | 1981 |
|
SU1024884A1 |
| КЛАПАН ЭЛЕКТРОМАГНИТНЫЙ НОРМАЛЬНО ЗАКРЫТЫЙ | 2020 |
|
RU2752959C1 |
| Регулятор давления | 1979 |
|
SU840834A1 |
| Регулятор давления | 1976 |
|
SU636590A1 |
