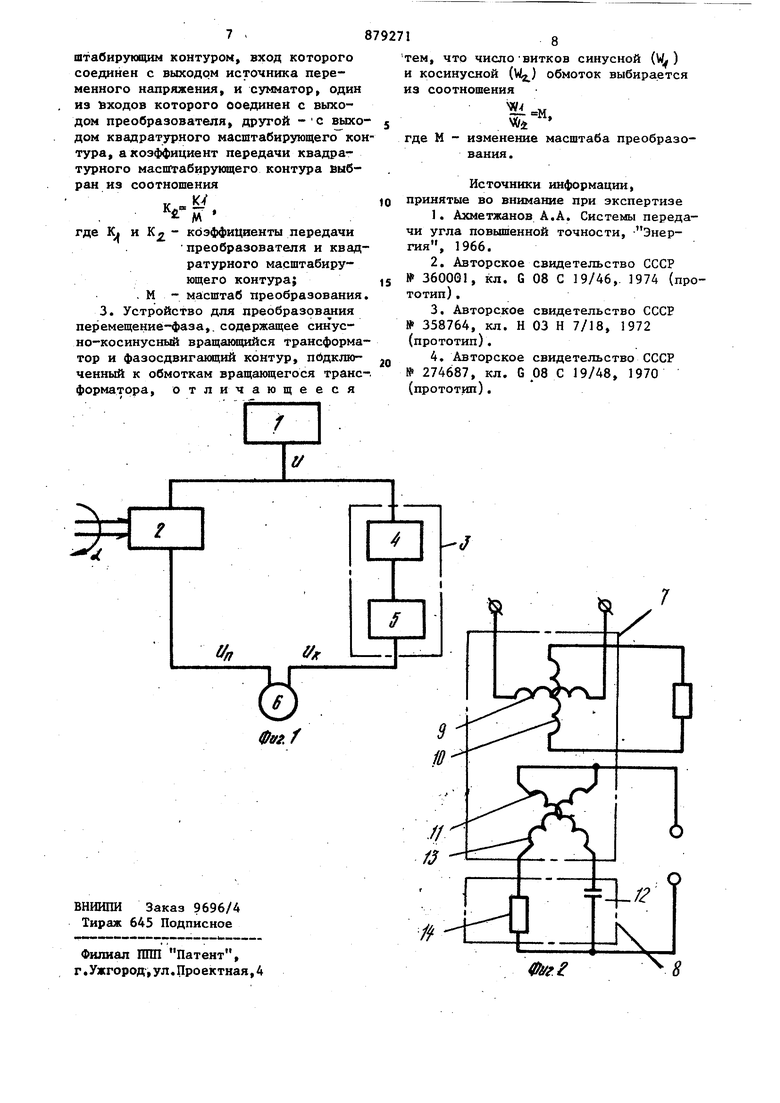
Изобретение относится к автоматическому контролю и регулированию и может быть использовано при создании устройства ввода информации в цифровые вычислительные машины. Известш 1й способ преобразования перемещение-фаза р заключается в формировании и подведении к квадратурным входным обмоткам ВТ двух квад ратурных сигналов, одинаковых по амплитуде. Оба эти сигнала модулируют по амплитуде в функции перемещений, ротора путем изменения взаимоиндукции между каждой входной и выходной обмоткой. Сигналы, индуктируемые каж дои из входных квадратурных обмоток, геометрически суммируются на выходно обмотке, а о перемещении ротора судят по фазе результирующего выходного сигнала. В этом способе преобразования уго фаза точность преобразования угла в фазу обусловлена точностью ВТ. Умень шение погрешностей, вносимых ВТ, может быть достигнуто увеличением его числа пар полюсов. Однако в существующих ВТ для увеличения числа пар полюсов требуется значительно увеличить его габариты, что часто является недопустимым. Наиболее близким к изобретению является способ преобразования перемещение-фаза f2j, заключающийся в том, что фор-щруют равные по амплитуде квадратурные сигналы, модулируют оба эти сигнала по амплитуде в функции перемещения и геометрически суммируют эти сигналы. Для повышения точности преобразования периодически переключают квадратурные сигналы между собой, ввделяя на выходе преобразователя ошибку от неравенства амплитуд зтих сигналов, которую затемисключают. Определяют перемещение по фазе результирующего сигнала. Известно устройство-ДЛЯ преобразования перемещение-фаза, содержащее последовательно соединенные источник 3 деременного напряжения и преобразователь Дз. Известно также устройство.для пре образования перемедаение-фаза, содерж щее синусно-косинусный вращающийся трансформатор и фазосдвигающий контур 4 . Недостатком известных технических решений является невысокая точность преобразования. Цель изобретения - повышение точности преобразования. Эта цель достигается тем, что в известном способе амплитуды квадратурных сигналов выбирают таким образом, что их отношение равно заданному увеличению масштаба преобразова ния . В устройстве, содержащем последовательно соединенные источник переменного напряжения и преобразователь цель достигается путем снабжения квадратурным масштабирующим контуром вход которого соединен с выходом источника переменного напряжения, и сумматор, один из входов которого соединен с выходом преобразователя, другой - с выходом квадратурного масштабирующего контура, а коэффигщент передачи квадратурного мас штабирующего контура выбран из соотношения : V м где К, и Кл - коэффициенты передачи преобразователя и квад ратурного масштабирующего контура; М - масштаб преобразования В устройстве, содержащем синуснокосинусный вращающийся трансформатор и фазосдвигающий контур, цель достигается тем, что число витков синусной (Wj) и косинусной (Wo) обмоток выбирается из соотношения М, где М - изменение масштаба преобразования. Способ преобразования перемещение-фаза заключается в том, что формируют два сигнала, смещенные по фазе на 90°, амплитуды этих сигналов выбирают таким образом, что их отношение равно заданному увеличению масштаба преобразования. По меньшей мере один из сигналов модулируют по амплитуде в функции измеряемого пере мещения. Далее геометрически суммируют эти сигналы. Величину перемеще14ния определяютпо фазе результирующего сигнала. На фиг. 1 представлена схема устройства для преобразования перемещение-фаза, реализующего способ и выполненного на основе индукционного преобразователя и квадратурного масштабирующего контура, на фиг.2 схема устройства-ДЛЯ преобразования перемещение-фаза, реализующего способ и выполненного на основе синусно-косинусного вращающегося трансформатора. Устройство на фиг.. содержит однофазный источник J переменного напряжения, выход которого соединен с преобразователем 2 и с квадратурным масштабирующим контуром 3, состоящем из последовательно включенного фазосдвигающего звена 4 и масштабирующего звена 5. Выходы преобразователя и квадратурного масштабирующего контура соединены с входом сумматора 6, с выхода которого снимается выходное напряжение устройства. В качестве преобразователя 2 может использоваться вращающийся трансформатор, индукционный потенциометр или другое индукционное устройство, обеспечивающее в малом угловом диапазоне поворота ротора линейное изменение выход- ного напряжения. Фазосдвигающее звено 4 представляет собой КС-цепи или грубый фазовращатель, а масштабирующее звено - масштабный трансформатор или делитель напряжения. Устройство на фиг; 2 содержит синусно-косинусный вращающийся трансформатор (,БТ ) 7 и фазосдвигающий контур 8. На обмотку 9 возбуждения ВТ подается напряжение от однофазного источника переменного тока. Квадратурная обмотка 10 служит для выполнения первичного симметрирования. Выходная обмотка 11 ВТ соединена с реактивным сопротивлением 12, а обмотка 1 3 - с активньпу сопротивлением 14. Выходные клеммы устройства подключены к точке соединения квадратурных обмоток 11 и 13 и к точке соединения сопротивлений 12 и 14. Обмотка 11 (синусная) вращающегося трансформатора 7 выполнена с числом витков W/i равным числу витков W обмотки 13 (косинусной) увеличенному на коэффициент повьшения масштаба преобразования угла в фазу (м). Способ осуществляется с помощью устройства по фиг. 1 следующим образом. При подведении напряжения питания от источника 1 на вход преобразователя 2, на вторичной обмотке преобразователя индуктируется ЭДС Uy, которая в малом диапазоне углов поворота ротора равна U KUa6, где К коэффициент, пропорциональности, о6угол поворота ротора. На выходе квад ратурного масштабирующего контура 3 создается напряжение Uj, амплитуда которого определяется передаточными функцияйи фазосдвигающего и масштаби рующего звеньев. Фаза напряжения Уцс ломощью фазосдвигающего звена 4 см щается на 90 относительно фазы напряжения LL . Напряжение на выходе квадратурного масштабирующего контура равно U|x j К, ). Угол сдвига фазы сигнала на выходе сумматора 6 определяется выражением tg f; - у, которое при малых значениях углов Ч равно i7V« Следовательно масштаб пре образова:ния угла оС ь фазу V определяется отношением коэффициентов пере дачи преобразователя (К ) и квадрату ного масштабирующего контура ( 1C) Способ осуществляется с помощью устройства по фиг. 2 следующим образом. При подключении обмотки возбуждения; 9 к источнику питания, на обмотках 11 и 13 индуктируются квадратурные ЭДС, зависяшряе от угла поворота и равные w.NWo U KU - siMRoi. и и,ки - cospo где Uu - напряжение питания; W - число витков обмотки возбуждения 9; W - числа витков вторичных обмо ток 11 и 13. При малых значениях углов поворота ротора (оО и сдвига фазы (Р) выходное напря;счение устройства имеет сдвиг фазы, равный: Следовательно масштаб преобразова ния угла в фазу в новом устройстве увеличен по сравнению с существующим преобразователями в W /Wpasa. Использование нового способа преобразования перемещение-фаза в малом угловом диапазоне обеспечивает по сравнению с существующими способами увеличение масштаба преобразования 16 при сохранении числа пар полюсов вращающегося трансформатора. Это дает пропорциональное повьшение точности преобразования перемещение-фаза без повьшзения требований к точности вращающегося трансформатора. При осуществлении способа устройством, состояш 1м :из индукционного преобразователя, квадратурного масштабирующего контура и сумматора, высокая точность преобразования перемещения в фазу обеспечивается при использовании однофазного источника питания и широко применяемых в приборостроении элементов с низкими точностными показателями. Все элементы устройства серийно вьтускаются отечественной промышленностью. Устройство дает возможность в широких пределах регулировать масштаб преобразования угла в. фазу, а следовательно, и его точность. Осуществление способа устройством, состоящим из синусно-; косинусного вращаклцегося трансформатора с разным числом витков вторичных квадратурных обмоток и фазосдвигающих цепей, обеспечивает повьш1ение точности преобразования при максимальном сокращении числа используемых элементов. Кроме того, увеличение масштаба и связанное с ним повышение точности преобразования в этом устройстве производится без увеличения габаритов и точности изготовления вращающегося трансформатора. Формула изобретения 1.Способ преобразования перемещение-фаза, заключающийся в том, что формируют квадратурные сигналы, по меньшей мере один из сигналов модули-. )уют по амплитуде в функции перемещения, геометрически суммируют эти сигналы, а о перемещении судят по фазе результирующего сигнала, отличающийся тем, что, с целью повьш ения точности преобразования, амплитуды квадратурных сигналов выбирают таким образом, что их отношение равно заданному увеличению масштаба преобразования. 2.Устройство для преобразования перемещение-фаза, содержащее последовательно соединенные источник переменного напряжения и преобразователь, отличающееся тем, что оно снабжено квадратурным мае-
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угол-код | 1978 |
|
SU886027A1 |
| Преобразователь угла поворота вала в фазовый сдвиг | 1984 |
|
SU1182680A1 |
| Однофазный фазовращатель | 1987 |
|
SU1458944A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU579642A1 |
| Фазовая система преобразования угла поворота в код | 1974 |
|
SU567163A1 |
| Двухотсчетный вращающийся трансформатор | 1988 |
|
SU1594657A1 |
| Двухотсчетный вращающийся трансформатор | 1982 |
|
SU1034130A1 |
| Многополюсный синусно-косинусный вращающийся трансформатор | 1983 |
|
SU1141524A2 |
| Двухканальный датчик угловыхпЕРЕМЕщЕНий | 1979 |
|
SU853377A2 |
| Способ контроля погрешностей круговых шкал | 1979 |
|
SU868337A1 |
