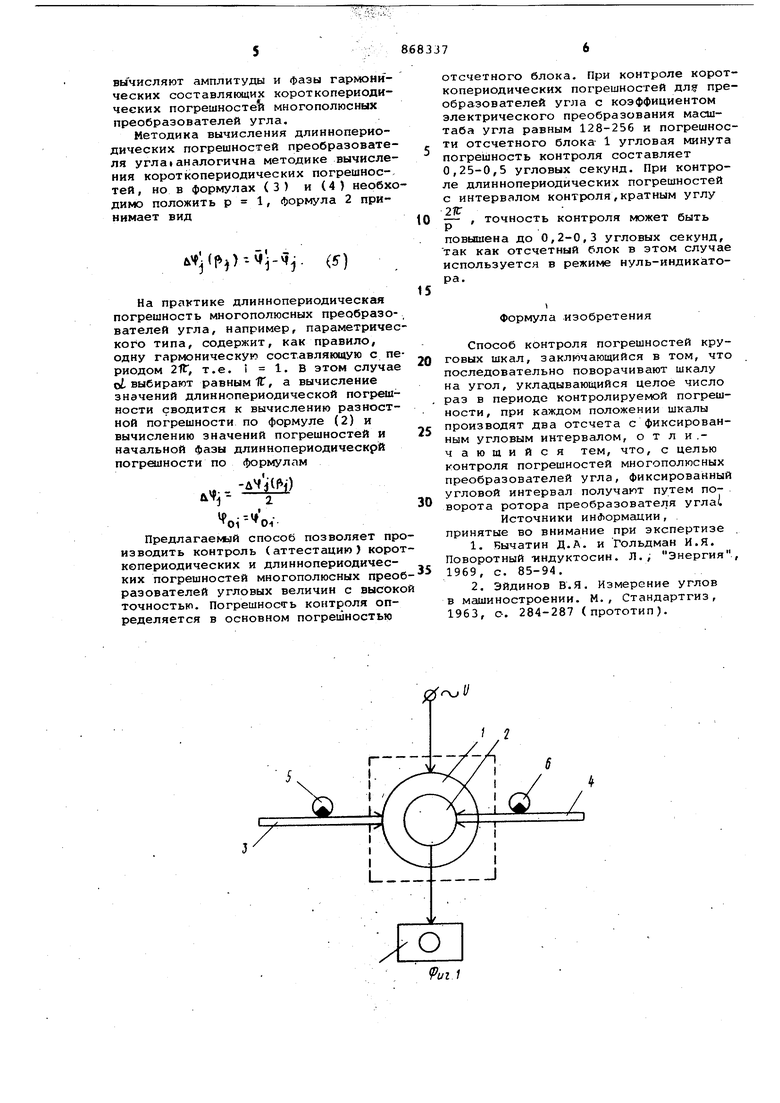
1 -. Изобретение относится к измерительной технике и может быть использовано для контроля погрешностей прецизионных многополюсных преобразо вателей угловых величин. Известен способ равных интервалов для контроля погрешностей много полюсных преобразователей угла, заключающийся в том, что сравнивают параметры (например, Фазы) выходных напряжений преобразователя угла и эталонного устройства при последовательном повороте ротора преобразов теля угл и производят отсчет углрвого положения ротора посредством высокоточного угломерного устройства. Погрешность преобразователя угла определяют как разность отсчитанного значения угла и расчетного значения 13-. Недостатками способа являются ограниченность его использования, так как он не позволяет измерять длиннопериодическую погрешность многбпрлюс ного преобразователя угла, и малая точность измерения, так как.в погрешность измерения входит погрешност .угломерного устройства. Наиболее близким к предлагаемому является способ контроля погрешности круговых шкал, заключающийся в том, что последовательно поворачивают шкалу на угол, укладывающийся целое число раз в периоде контролируемой погрешности, при каждом положении шкалы производят два отсчета с фиксированным угловым интервалом, по полученной серии отсчетов вычисляют погрешности шкалы 2. Недостатком известного способа, является невозможность его использования при контроле погрешностей многополюсных преобразователей угла. Цель изобретения - контроль погрешностей многополюсных преобразователей угла. Поставленная цель достигается тем, что фиксированный угловой интервал получают путем поворота ротора преобразователя угла. На фиг. 1 изображена блок-схема устройства, реализующего способ; на фиг. 2 - кривые идеальной и реальной функций преобразования многополюсного преобразователя угла. Устройство содержит статор 1, к обмоткам которого подведено напряжение и питания переменного тока, и ротор 2 контролируемого преобразователя, приводы 3 и 4 поворота статоf)a и ротора соответственно, отсчетные школы 5 и б углов поворота приподов 3 и 4, отсчетный блок 7, по ко торому производят отсчет значения функции преобразования преобразовате ля. В качестве отсчетного блока прк контроле многополюсного преобразователя угла, работающего в режиме фазовращателя, можно использовать электронные фазометры или он может быть выполнен в виде синусно-косинусного вращающего трансформатора, установленного в угломерный прибор, первичные обмотки которого подключены к выходным обмоткам ротора 2 контролируемого преобразователя, а вторичные обмотки через фазосдвигающие контуры к фазовому нуль-индикатору. При контроле многополюсного пре образователя угла, работающего в амплитудном режиме, отсчетный блок мож но выполнять в виде синусно-косинусного вращающегося трансформатора, ус тановленного в угломерный прибор, с первичными обмотками, подключенными к выходным обмоткам ротора 2 контро лируемого преобразователя, и вторич ными обмотками - к нуль-индикатору или вольтметру. На Лиг. 2- по оси абсцисс отложен углы ро ,N , Ра--РГ- - угол, значение которого укла дывается целое число раз в периоде. контролируемой погрешности и на кот рый послеДовательно поворачивают статор, по оси ординат отложены зна чения функции преобразования Ч V-J и Vlj, vf,% и l, - значения идеальной и реальной функции преобразования в у ловых положениях статора относитель но ротора многополюсного преобразователя угла, равных PJИ р +af., р коэффициент электрического преобразования масштаба, численно равный ч лу пар полюсов преобразователя угла максимальное значение функции преобразования, OL - фиксированный угловой интервал, на который повора чивается ротор преобразователя. Способ осуществляется следующим образом. Ротор 2 с помощью привода 4 пово рачивают до положения, при котором на шкале 6 устанавливается нулевой отсчет. Статор 1 с помощью привода поворачивают до положения, при кото ром по шкале отсчетного блока 7 устанавливается нулевое значение Функ ции . преобразования - первый отсчет «f(J. Шкалу 5 устанавливают в нулевое положение. Приводом 4 по шкале б ротор 2 поворачивают на фиксированный угловой интервалов , производят второ отсчет значения функции преобразова ния Q ПО шкале отсчетного блока 7 и возвращают ротор в исходное полож ние по шкале 6. Приводом 3 по шкале 5 статор 1 поворачивают на угол и производят третий отсчет f по шкале отсчетного устройства 7. Приводом 4 по шкале 6 ротор 2 поворачивают на угловой интервал Х/, производят четвертый отсчет по шкале отсчетного блока 7 и возвращают ротор в исходное положение по шкале 6. Проводят описанные операции п раз до поворота статора 1 на угол -- -р при измерении короткопериодических погрешностей, период которых равен или меньше угла 2 , и 21С - 1% при измерении длиннопериодических погрешностей, период которых больше угла или равен 2/Г. . Р При измерении короткопериодических погрешностей фиксированный угловой интервал Сб выбирают равным или мень1Гшим . Например, если короткопериодическая погрешность состоит из одной гармоники с периодом целесообразно принять равным При измерении длиннопериодических погрешностей фиксированный угловой интервал cL выбирают равным или меньшим It. Например, если длиннопериодическая погрешность состоит из одной гармоники с периодом 27С, то с целесообразно принять равным It. По результатам испытаний получают серию отсчетов функции преобразования мрогополюсного преобразователя угла fo о - fi V2.Vi ...- , ... (J,, (fj, , по которым вычисляют значения короткопериодических или длиннопериодических погрешностей следующим образом. Для вычисления гармоник короткопериодической погрешности по полученной серии отсчетов (1 вычисляют значения погрешностей AV jTft,), равных разности истинных погрешностей преобразователя угла в положениях р; и//% статора 1, по формуле л(1%)(), Полученную экспериментальную функцию (2) разлагают в ряд Фурье и определяют амплитуды Л -и начальные Ьа1пГ1зы 4 гармонических составляющих разностной погрешности. По формулам А - .У - 251Hi{Pa/2) f .--ч --1 . rvJ г.. т л т си 01 вычисляют амплитуды и фазы гармонических составляющих короткопериодических погрешностей многополюсных преобразователей угла. Методика вычисления длиннопериодических погрешностей преобразовате ля угла аналогична методике вычисления короткопериодических погрешноетей, но в формулах (3) и (4) необхо димо положить р 1, формула 2 принимает вид ;(). (5) На практике длиннопериодическая погрешность многополюсных преобразователей угла, например, параметричес кого типа, содержит, как правило, одну гармоническую составляющую с пе риодом 21f, т.е. i 1. В этом случае ot выбирают равным иг, а вычисление значений длиннопериодической погрешности сводится к вычислению разностной погрешности по формуле (2) и вычислению значений погрешностей и начальной фазы длиннопериодическрй погрешности по формулам .. 2 Предлагаемой способ позволяет пр изводить контроль (аттестацию) коро копериодических и длиннопериодических погрешностей многополюсных прео разователей угловых величин с высок точностью. Погрешность контроля определяется в основном погрешностью отсчетного блока. При контроле короткопериодических погрешностей дл преобразователей угла с коэффициентом электрического преобразования масштаба угла равным 128-256 и погрешности отсчетного блока 1 угловая минута погрешность контроля составляет 0,25-0,5 угловых секунд. При контроле длиннопериодических погрешностей с интервалом контроля,кратным углу 2Г - , точность контроля может быть повышена до 0,2-0,3 угловых секунд, так как отсчетный блок в этом случае используется в режиме нуль-индикатора. Формула изобретения Способ контроля погрешностей круговых шкал, заключающийся в том, что последовательно поворачивают шкалу на угол, укла,цывающийся целое число раз в периоде контролируемой погрешности, при каждом положении шкалы производят два отсчета с фиксированным угловым интервалом, о т л и .чающийся тем, что, с целью контроля погрешностей многополюсных преобразователей угла, фиксированный угловой интервал получают путем поворота ротора преобразователя угла . Источники инд)0рмации, принятые во внимание при экспертизе 1.Бычатин Д.А. и Гольдман И.Я. Поворотный индуктосин. Л.; Энергия, 1969, с. 85-94. 2.Эйдинов В.Я. Измерение углов в машиностроении. М., Стандартгиз, 1963, о. 284-287 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля погрешностей круговых шкал | 1982 |
|
SU1060937A2 |
| Устройство для проверки преобразователей угол-код | 1976 |
|
SU743005A1 |
| Способ контроля многополюсного вращающегося трансформатора | 1988 |
|
SU1647787A1 |
| Поворотное устройство | 1985 |
|
SU1332259A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ УГЛОМЕРНОЕ УСТРОЙСТВО ПОВОРОТНОГО ТИПА С ОПТИЧЕСКИМ УКАЗАТЕЛЕМ НА ОСНОВЕ МНОГОЗНАЧНОЙ МЕРЫ И ФОТОЭЛЕКТРОННЫМ РЕГИСТРАТОРОМ | 2007 |
|
RU2377498C2 |
| Многофазный многополюсный вращающийся трансформатор | 1983 |
|
SU1069082A2 |
| СПОСОБ КАЛИБРОВКИ ГРУППЫ СРЕДСТВ ИЗМЕРЕНИЙ ПЛОСКОГО УГЛА С СУММАРНЫМ ДИАПАЗОНОМ ШКАЛ НЕ МЕНЕЕ 360° | 2007 |
|
RU2377499C2 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |

5
