I
Изобретение относится к области весоизмерительной техники.
Известно устройство управления весовым порционным дозатором, содержащее весоизмерительную систему, датчики грубого и точного веса, блок управления, блоки контроля времени набора грубого и точного веса, состоящие из злементов памяти и задатчиков времени р.
Это устройство не обеспечивает требуемую точность набора порции, так как не учитывает ряд факторов, влияющих на результат дозирования скорости поступления материала, время срабатывания затвора и т.д.
Ближайшим по технической сущностипрототипом изобретения является весовой порционный дозатор, содержащий грузоприемный бункер, установленный на силоизмерительные датчики, подключенные к входу блока измерения сигнала, и блок самообучения, входы которого подключены к выходам блока
определения скорости загрузки, блока определения величины и знака ошибки текущего цикла дозирования, блока определения времени закрытия затвора и задатчика массы порции, а выходы - к первому входу блока определения времени закрытия затвора и входу формирователя выходного сигнала задатчика порции, выход которого подключен к первому входу узла
10 сравнения, своим выходом соединенного со вторым входом блока определения времени закрытия затвора и с входом блока управления затвором, соединенного с приводом затвора пи15тателя 2.
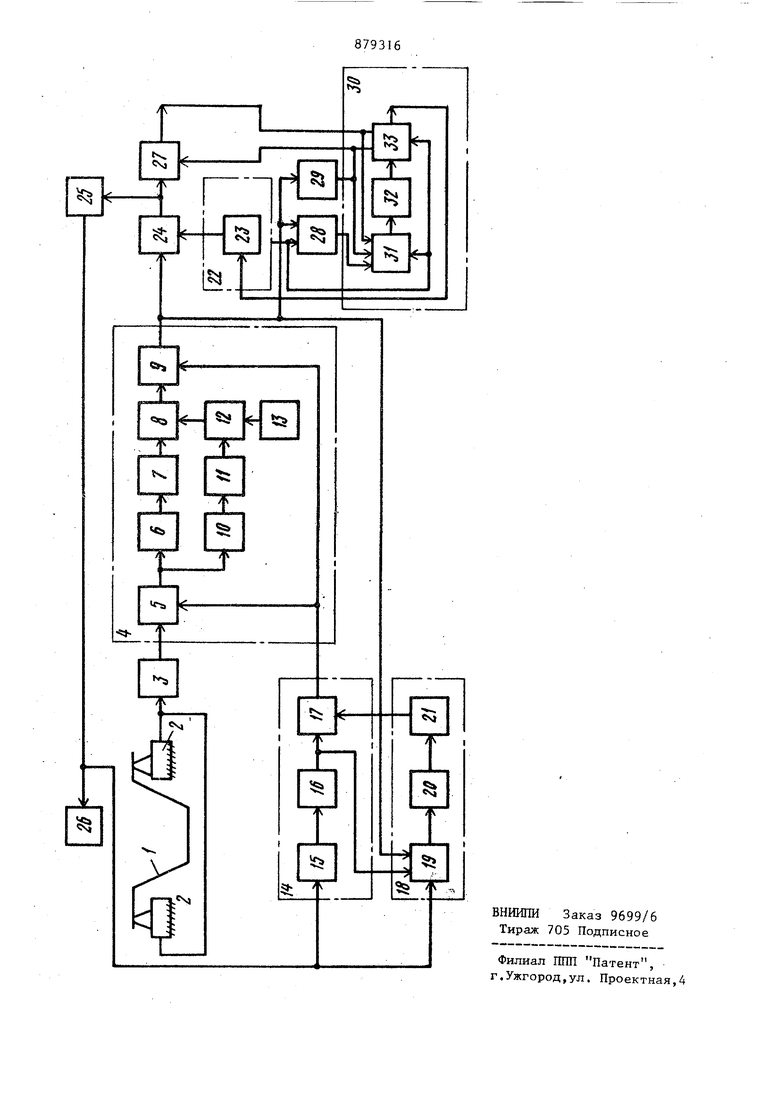
Одним из недостатков этого дозатора является то, что он не обеспечивает требуемую надежность порционного дозирования, так как не предус20матиривается возможность автоматического управления дозированием в случае отказа в процессе набора силоизмерительных датчиков или блока из3мерения сигнала, что необходимо хотя бы для завершения цикла дозирования. Другой недостаток заключается в следующем. Блок самообучения позволя ет наиболее, эффективно устранить вли яние случайных факторов только при нормальном (гауссовом) распределении ошибок дозирования ДР. Однако сигналы, получаемые на выходе применяемых в промышленности измерителей, содержат, помимо случайных, также и нерегулярные составляющие типа выбросов, обусловленные помехами импульсного характера. 1Эти помехи приводят к существенным ошибкам в определении момента закрытия затвора и, соответственно, к значительным погрешностям дозирования. Следствием последних являются систематические ошибки в оценивании коэффициентов модели и в последующем ошибки прогнозирования ДР (n-t-l). Все это снижает точность дозирования. Целью изобретения является повьш1е ние надежности порционного дозатора и повышение точности дозирования. Цель достигается тем , что в порционный дозатор введены блок оценки текущего значения массы, блок выработки программы изменения массы в процессе ее набора и блок коррекции оценки средней скорости набора массы причем блок оценки текущего значения массы выполнен в виде последовательно соединенных вычитателя, усилителя с насьш(ением. фильтра низкой часто ты, ключа и сумматора и элемента сра нения, первый вход которого через реле и узел определения длительности отказа датчиков соединен с выходо вычитателя, второй вход связан с задатчиком длительности отказа, а выход - с ключем, блок выработки программы изменения массы в процессе ее набора вьтолнен в виде последовател но соединенных ключа, узла определения длительности набора и умножителя, а блок коррекции оценки средней скорости набора выполнен в виде посл довательно coeдиfceнныx делителя, фи тра низкой частоты и узла запоминания, при этом первый вход вычитателя блока оценки текущего значения массы подключен к выходу блока измерв ния сигнала, второй вход вычитания и вход сумматора подключены к выходу умножителя блока выработки программы изменения массы при ее наборе, а выход сумматора подключен к второ64му входу узла сравнения, к блокам определения скорости загрузки и определения величины и знака ошибки текущего цикла дозирования и к первому входу делителя блока коррекции оценки средней скорости набора массы, второй вход которого соединен с выхо,дом узла определения длительности набора блока выработки программы изменения массы в процессе ее набора , ключ которого и третий вход делителя подключены к выходу блока управления затвором, а выход узла запоминания блока коррекции оценки средней скорости набора массы подключен к входу умножителя блока выработки программы изменения массы при ее наборе. Введение в порционный I дозатор блока оценки текущего значения массы, бло-; ка выработки программы изменения массы в .процессе набора и блока коррекции оценки средней скорости набора позволяет повысить, по сравнению с прототипом, точность дозирования благодаря повьщ1ению точности оценива ния текущих значений массы за счет контроля достоверности выходного сигнала блока измерения и отбраковки больших ошибок измерения (недостоверных значений), а также за счет фильтрации обычных ошибок измерения. Кроме того, повышается надежность порци-i онного дозатора по сравнению с прототипом, так как в случае отказа датчиков или каких-то других нарушений в измерительных цепях предусматривается возможность управления дозированием в соответствии с программой изменения массы в процессе набора; при этом обеспечивается приемлемая точность дозирования на достаточно большом количестве циклов набора, что достигается благодаря коррекции оценки средней скорости набора с учетом тенденции ее изменения . . На чертеже показана блок-схема описываемого дозатора. Порционный дозатор содержит грузоприемный бункер 1, силоизмерительные датчики 2, блок 3 измерения сигнала датчиков 2, блок 4 оценки текущего значения массы, состоящий из вычита-теля 5, усилителя с насьш1ением 6, Ф11льтра низкой частоты , выполненного , например, в виде интегратора, охваченного отрицательной обратной связью, ключа 8, сумматора 9, двух oзициoннoгo реле 10,реле 11 опре5деления длительности отказа, элемента сравнения 12, задатчика 13 пре дельно допустимой длительности отказа, блок 14 выработки программы изме нения массы в процессе ее набора, состоящий из ключа 15, узла 16 определения длительности набора текущего цикла и умножителя 17, блок I8 ко рекции оценки средней скорости набора, состоящий из делителя 19 фильт ра низкой частоты 20 и узла 21 запом нания, задатчик 22 с блоком 23 форми рования выходного сигнала, узел сравнения 24, блок 25 управления зат вором питающего узла 26, блок 27 опр деления времени закрытия затвора, блок 28 определения величины и знака опшбки текущего цикла дозирования, блок 29 определения скорости загрузки, блок 30 самообучения, вклю чаняций узел 31 решения системы уравнений, интегратор 32 и узел 33 моделирования . Устройство работает следующим образом. При поступлении материала в грузоприемный бункер 1 сигналы силоизме рительных датчиков 2, пропорциональные массе материала в бункере 1, подаются на вход блока 3 измерения. Оц нивание текущего значения массы ма териала в грузоприемном бункере 1 осуществляется в блоке 4. Из текущего значениясигнала на выходе блока 3 в вычитателе 5 вычитается сигнал, пропорциональный программному значению массы P(t,n + l) на теку1ций момент времени. Сигнал с выхода вычитателя 5, про порциональный отклонению AP(t,n+l) текущего значения сигнала на выходе блока 3 от программного значения мас сы P(t,n+l ) поступает на вход усилителя с насьщением 6, имеющего коэффициен усиления, равный единице. Величина ограничения (насыщения) выбирается, исходя из наибольшей величины сигнала с вычитателя 5 при нормальном функционировании датчиков 2 и блока 3. Если абсолютная величина этого сигнала превышает заданные ограничения, на вход фильтра низ кой частоты 7 поступает сигнал, равный по величине ограничению, а по знаку совпадающий со знаком разностного сигнала с выхода вычитателя 5. Одновременно включается реле 10 и в узле 11 фиксируется общее время, в 6 . 6 течение которого сигнал с выхода бл9ка 3 на текущем (п+1)-м цикле имеет недостоверное значение, (длительность отказа). Если длительность отказа не превьшает предельно допусти-мой величины, задаваемой задатчиком 13, то ключ 8 замкнут, и сигнал с выхода фильтра 7 поступает на вход сумматора 9, а сигнал оценки текущего значения массы материала формируется путем суммирования в сумматоре 9 сигналов с выхода умножителя 17 и с выхода фильтра 7. Если же рштельность отказа превышает допустимую величины, то по сигналу элемента сравнения 12 размыкается ключ 8. В этом случае сигнал на выходе сум матора 9 равен сигналу с умножителя 17, ив качестве текущей оценки значения принимается программное значение P(). Сигнал, пропорциональный значению P(t,n+l), формируется на выходе умножителя 17 блока 14. По сигналу открытия затвора замыкается ключ 15 и запускается узел 16 определения длительности набора. Сигнал с выхода узла 16, пропорциональный длительности набора, подается на (здин из входов умножителя 17, на второй вход которого подается сигнал с выхода блока 18, пропорциональный прогнозируемой на текущий (о+,1)-ый цикл дозиро вания скорости набора. Сигнал на выходе умножителя I7 пропорционален значению массы материала в бункере в текущий момент времени дозирования (программной массе P(t,n + 0) в предположении, что набор материала в бункер производится с постоянной средней скоростью. Программное значение массы рассчитьгеается в блоке 14 путем умножения оценки средней скорости набора К (n+l) на текущем (п+1)-м цикле на величину интервала времени , (n+l) , определяемого узлом 16 с момента начала набора t() на, текущем цикле, то есть Р (t,n+l) K(n+l).t-tj,(n + l) Узел 16 запускается и отключается ключом 15 по сигналу на открытие и закрытие затвора с выхода блока 25. Оценивание средней скорости набора осуществляется в блоке 18, где величи7
на набранной массы материала на цикле дозирования делится в делителе 19 на величину интервала времени, в течение которого велся набор на этом цикле. Запуск блока 18 осуществляется по сигналу закрытия затвора. Информация о набранной массе поступает на вход делителя 19 с выхода сумматора 9, а информация о длительности набора поступает с узла 16. Получаемый на выходе делителя 19 сигнал оценки средней скорости пропускается через фильтр низкой частоты 20 с целью усреднения с учетом оценок, полученных на предшествующих циклах, и запог минается в узле 21.
Сигнал с выхода сумматора 9, пропорциональный величине оценки массы, поступает на один из входов узла сравнения 24, на другой вход которого с блока 23 подается скорректированг-j ный сигнал задания Р.(п + 1) пропорциональный значению массы материала в грузоприемном бункере, по достижении которого подается сигнал на закрытие затвора.
(п + О Р(п + 1) - Р(п + 1),
)ь
где РЧП + О- задание на массу порции
на текущем (п+1)-м цикле, формируемое на выходе задатчика 22, ДР(п+0 величина коррекции на текущем цикле, формируемая узлом моделирования 33.
При равенстве сигналов на входе уз ла сравнения 24 в блоке 25 формируется команда на закрытие затвора питающего узла 26, и запускается блок 27 определения времени закрытия затвора. Работа блока 27 заканчивается по сигналу с блока 29 о прекращении поступления материала в грузоприемный бункер.
По сигналу закрытия затвора размы кается ключ 15, и заканчивается рагрота узла 16. Одновременно с этим запускается делитель 19, который осуг ществляет деление сигнала с выхода блока 4, пропорционального массе материала в бункере в момент закрытия затвора, на сигнал с выхода узла 16, пропорциональный длительности набора На выходе делителя 19 формируется сигнал, пропорциональный средней скорости набора на завершившемся цикле дозирования. Значение средней скорое ти прогнозируется на следующий цикл
168
с помощью низкочастотного фильтра 20 и запоминается в узле 21.
По окончании цикла дозирования в блоке 28 формируется сигнал ошибки, пропорциональный разности
ЛР(п)р (п)-рЧп) ,
где Р (п) - фактическое значение массы дозы после полного закрытия затвора и прекращения поступления материала в грузоприемный бункер.
Процесс самообучения осуществляется блоком 30. Проводится п, последовательных циклов дозирования, по результатам которых (п-2) раз последовательно рншается система уравнений вида
лРСм-2)--а(к(и-а)Ъ(и-2}4С Р(м-2),
PCM-i)(v -i}4b t:()(n-i),
г.(У1)(и)(и)+СиРСи),
где 7/ - время закрытия затвора в соответствующем цикле I
К- скорость загрузки. В ходе каждого из циклов дозирования блоками 27, 28, 29 определяются соотгетствукицие значения t ,&Р, к которые вместе с Р поступают на входы узла 31 решения системы уравнений и блока 33 моделирования. В узле 31 полученная система уравнений решается относительно коэффициентов а.., Ь. Cj, .которые затем поступают на интегратор 32, На выходе интегратора 32 формируются осредненные по N предшествующим циклам дозирования значения коэффициентов а, Ь, Су,. По этим значениям коэффициентов, по значениям к(п+1) иР{п4-1) текущего (п+Г)го цикла и по величине t/ {п) предшествующего цикла прогнозируется значение АР(п+1) по модели
ДР(ИИ)-а(И-н)(и). Вычисленное значение ЛР (,п+ j поступает на вход блока-23 формирования выходного сигнала задатчика,Информация, полученная в (n+l)-M цикле дозирования.,используется для уточнения коэффициентов ЗУ,, ti c, то есть производится их усреднение с учетом этой информации. Количество N осредняемых результатов определяется требуемой точностью дозир.ования и характеристиками дeйcтвyюш x на систему возмущений. Усреднение всегда осуществда.ртгя по N последним результатам 5 дозирования. По получении ()-ro результата, первый результат отбрасывается . Таким образом, в процессе оценивания текущих значений массы осущес ляется контроль достоверности выходного сигнала блока измерения, исключение недостоверных значений сигнала и фильтрация обычных ошибок измерения, что позволяет повысить точность оценивания текущих значений массы. Дополнительное повьппение точности оценивания обеспечивается центрированием в блоке А текущих значений сигнала блока 3 измерения относительно нестационарного значе ния P(t, n+l). задаваемого программой изменения массы в процессе набора и формируемого в блоке 14, что позволяет существенно снизить динамическую ошубку фильтрации, так как более полно соблюдаются предпосы ки функционирования фильтра 7 низкой частоты. Фотэмиоование поогоаммы измерения массы материала в процесс набора на основе оценки средней ско рости дозирования, корректируемой с учетом предшествующих циклов, поз воляет в случае отказа силоизмерительных датчиков или блока измерения сигналов осуществлять дозирование с приемлемой точностью, что обеспечи вает высокую надежность дозатора. Формула изобретения Весовой порционный дозатор, содер жащий грузоприемный бункер, установленный на силоизметзительные датчики подключенные к входу блока измерения сигнала, и блок самообучения, входы которого подключены к выходам блока определения скорости загрузщ блока определеняи величины и знака ошибки текущего цикла позирования, блока определения времени закрытия затвооа и задатчика массы порции, а выходы - к первому входу блока определения времени закрытия затвора и входу Формирователя выходного сигнала задатчика пориии, выход которого подключен к пеовому ВХОДУ узла сравнения, своим выходом соединенного со вторым входом блока определе ния времени закрытия затвооа и с входом блока управления затвором со единенного с -приводом затвора питателя, отлич ающийся тем. 10 что, с целью повышения его надежности и точности дозиосванмя, в него введены блок оценки текущего значе-. ния массы, блок выработки программы изменения массы в процессе ее набора и блок коррекции оценки средней скорости набора массы| причем блок оценки текущего значения массы выполнен в виде последовательно соединенных вычитателя, усилителя с насыщением, бэильтра низкой частоTb j ключа и сумматора, и элемента сравнения, первый вхоп которого через реле и узел определения длительности отказа датчиков соединен с выходом вычитателя второй вход связан с задатчиком длительности отказа, а выход - с ключеМр блок выработки программы изменения массы в процессе ее набора выполнен в виде последовательно соединенных кдюча, узла определения длительности набора и умножителя, а блок коррекции оценки средней скорости набора выполнен в виде последовательно соединенных делителя, «Ьильтра низкой часто ты и узла запоминания, при этом первый вход вычитателя блока оценки текущего значения массы подключен к выходу блока измерения сигнала второй вход вычитателя и вход сумматора подключены к выходу умножителя блока выработки программь: изменения массы при ее наборе, а выход сумматора подключен к ВТОРОМУ входу узла сравнения, к блокам определения скорости загрузки и определения величины и знака ошибки текущего цикла дозирования и к первому входу делителя блока коррекции оценки средней скорости набора массы, ВТОРОЙ вход которого соединен с выходом узла определения длительности набора блока выработки программы изменения массы в процессе ее набора, ключ которого и третий вход делителя подключены к выходу блока управления затвором, а выход узла запоминания блока коррекции оценки средней скорости набора масся подключен к входу умножителя блока выаботки программы изменения массы ри ее наборе. Источники информации, ринятые во внимание ПРИ экспертизе 1.Авторское свидетельство СССР 532769, кл. G 01 G 13/18. 1975/ 2.Авторское свидетельство СССР 515947, кл. G 01 G i3/28, 1975. (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для весового порционного дозирования | 1978 |
|
SU697832A1 |
| Весовой порционный дозатор с цифровым управлением | 1989 |
|
SU1688124A1 |
| Устройство управления весовым порционным дозатором | 1984 |
|
SU1191746A2 |
| Устройство для весового многокомпонентного порционного дозирования например, компонентов шихты доменного процесса | 1975 |
|
SU520516A1 |
| Устройство для весового порционного дозирования | 1988 |
|
SU1582026A1 |
| Автоматический порционный дозатор | 1988 |
|
SU1534330A1 |
| Весовой порционный дозатор | 1977 |
|
SU648847A1 |
| Устройство управления весовым порционным дозатором | 1982 |
|
SU1035427A2 |
| Устройство для дозирования компонентов шихты доменного процесса | 1980 |
|
SU935883A1 |
| Устройство для определения количества однотипных предметов в партии | 1990 |
|
SU1783316A1 |