изобретение относится к медицинекой технике, а именно, к устройствам ДЛЯ психофизиологических исследований, диагностики нарушений и тренировки оптимальных усилий человека, направленных на органы ручного управ пения. Известно устройство для исследова ния и тренировки мьппечных усилий, которое содержит рукоятку с чувствительным элементом. Изменение давлени рабочего воздуха в чувствительном злементе передается одновременно на тензометрический датчик усилия, преобразукиций давление воздуха в пропорциональный ему электрический сигнал, и на один из входов дифференциального датчика давления и регулируемый клапан. С выхода регулируемого клапана сигнал поступает на второй вход дифференциального датчика давления, который преобразует давление (В электрический сигнал. С вькхода тензо- метрического датчика усилия и дифференциального датчика давления электри ческие сигналы поступают на два регистрирунндих прибора . Однако это устройство ,не обеспе-. чивает автоматическое исследование и тренировку испытуемого на оптимальное (минимально необходимое усилие, вызывающее перемещение органа управления. Известно также устройство для исследования и тренировки мьш1ечных усилий, которое содержит датчик мышечных усилий, чувствительный элемент, регулировочный клапан, дифференциальный датчик давления, амплитудный детектор, усилитель и коьс мутатор, соединенный с датчиком мышечных усилий, и два регистрирукнщх прибора, соединенные с датчиком мышечных усилий и дифференциальным датчиком давления соответственно 2}. Однако известное устройство не обеспечивает исследование и предупреждение 1ФШ1ечной напряженности
при механических перемещениях органов управления, что снижает функциональную эффективность устройства. Цель изобретения - исследование и предупреждение мышечной напряженности при механических перемещениях органов управления.
Поставленная цель достигается тем что в устройстве для исследования и тренировки мьшечных усилцй, содержащем последовательно соединенные дат чик мышечных усилий, чувствительный элемент, регулировочный клапан, дифференциальный датчик давления, амплитудный детектор, усилитель и коммутатор, соединенный с датчиком мышечных усилий и два регистрирующих прибора, соединенные с датчиком мышечных усилий и дифференциальным датчиком давления соответственно, имеются последовательно соединенные блок программирования мышечных усилий,схема сравнения, усилитель и тормозной механизм, механически соединенный с органом управления, и третий регистрирующий прибор, соединенный с выходом схемы сравнения, причем второй вход схемы сравнения соединен с выХ.ОДОМ коммутатора.
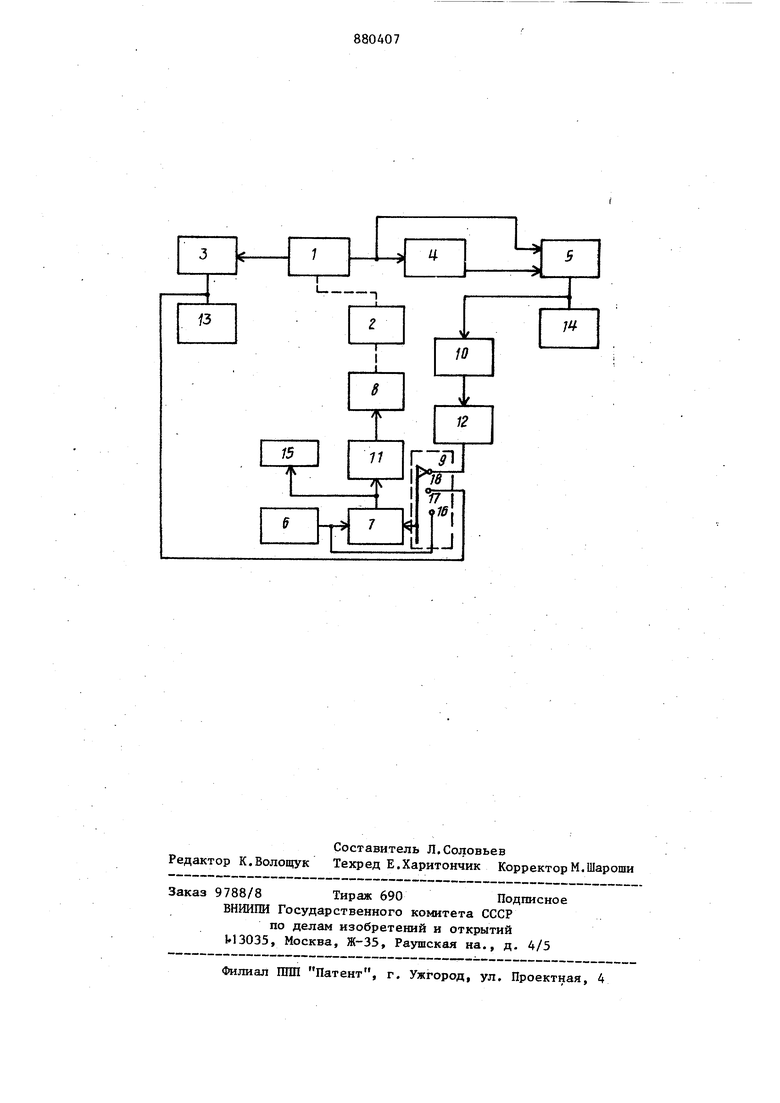
На чертеже изображена структурная схема устройства для исследования и тренировки мышечных усилий.
Устройство содержит чувствительный элемент 1, расположенный на рукоятке 2 органа ручного управления, датчик 3 мьшхечного усилия сжатия рукоятки, регулировочный клапан 4,дифференциальный датчик 5 давления, бло 6 программирования мышечных усилий, схему 7 сравнения, тормозной механиз 8, создаюш;ий противодействующее усилие (торможение движению рукоятки 2 органа ручного управления, коммутатор 9, амплитудный детектор 10, усилители 1 и 12 постоянного тока, регистрирукнцие приборы 13-15. Причем коммутатор 9 снабжен контактами 16, 17 и 18. Первый вход схемы 7 сравнения соединен с выходом блока 6 программирования, второй вход соединен через коммутатор 9 с выходом датчика 3 усилия непосредственно и с выходом дифференциального датчика 5 давления через усилитель 12постоянного тока и амплитудный детектор 10 Выход схемы 7 сравнения подключен к регистрирующему прибору 15 и через усилитель 11 постоянного тока к тормозному механизму 8, кинематически
;вязанному с рукояткой 2 органа ручного управления.
Устройство работает следующим образом.
Первоначально устройство приводится экспериментатором в исходное состояние путем установления коммутатора 9 в положение замыкания контакта 16. Это состояние работы устройства характеризуется тем, что оператору дается задание начать выполнение какого-либо элемента движения рукояткой 2 органа ручного управления. При выполнении оператором заданного движения рукояткой 2 в чувствительном.элементе I, находящемся на рукоятке, происходит измене ние давления рабочего воздуха, которое обуславливается усилием сжатия и усилием, вызываемым тремором пальцев. Изменение давления рабочего воздуха в чувствительном элементе 1 передается одновременно к датчику
3усилия сжатия, регулировочному клапану 4 и на один из входов дифференциального датчика 5 давления. Датчик 3 преобразует давление воздуха в пропорциональный ему электрический сигнал, который поступает на регистрирующий прибор 13 и на контакт 17 коммутатора 9. Регулировочный клапан
4пропускает только изменения давления, вызванные усилием сжатия рукоятки 2 органа ручного управления, и непропускает изменений давления, вызванных тремором пальцев, которые значительно, меньше по амплитуде, но выше по частоте усилий, вызванных сжатием рукоятки 2. С выхода регулировочного клапана 4 сигнал поступает на второй вход дифференциального дат чика 5 давления, который преобразует давление в электрический сигнал, пропорциональный разности давлений, действующих на его входах,т.е. с выхода дифференциалы1ого датчика давления на вход регистрирующего прибора 14 и амплитудного детектора 10 поступает электрический сигнал, пропорциональный изменению усилия, вызванного тремором пальцев, С выхода датчика 5 изменяющийся по айшпстуде электрический сигнал с частотой тремора детектируется амплитудньш детектором 10 и на вход усилителя 12
5 постоянного тока поступает сигнал, пропорциональный изменению амплитудных значений усилия, вызванному тремором пальцев, т.е. выделяется огиающая электрического сигнала усилия, ызванного тремором пальцев. После силения по напряжению сигнал постуает на контакт 18 коммутатора 9. Таим образом, в исхолном состоянии работы устройства приборы 13 и 14 регистрируют соответственно произвольные усилия, вызванные сжатием рукоятки 2, и усилия, вызванные тремором пальцев, в процессе выполнения оператором заданного элемента движения рукоятки.
Далее экспериментатор, не прерывая процесса выполнения оператором заданного элемента движения рукоятки, с помощью блока 6 оперативно программирует для оператора задание: закон изменения усилия, вызванного сжатием рукоятки или тремором пальцев (в зависимости от того, в каком положении находится коммутатор 9) . При нахождении коммутатора 9 в положении замыкания контакта 17 с помощью схемы 7 сравнения вырабатывается сигналу превышения (рассогласования текущего значения усилия сжатия рукоятки 2, поступающего с выхода датчика 3, над сигналом задания, формируемого блог ком 6. Сигнал рассогласования регистрируется прибором 15 и одновременно усиливается по напряжению и мощности с помощью усилителя 11 постоянного тока, коэффициент усиления которого может быть изменен в широком диапазоне по желанию экспериентатора. Выход усилителя II нагружен на тормозной механизм 8. В качестве тормозного механизма применен двигатель постоянного тока с параллельным возбуждением в режиме динамического торможения., Тормозной механизм 8 кинематически связан с рукояткой 2, вследствие чего оператор испытывает кожно-мышечным чувством нротиводействукяцее усилие (тормозящий момент движению рукоятки в случае, если усилие сжатия рукоятки превышает по величине сигнал задания. При равенстве усилия сжатия и усилия задания тормозявщй момент исчезает, что соответствует достижению оператором оптимального усилия сжатия рукоятки реагирующим органом. Динамика поиска и достижения оператором оптимального усилия в процессе тренировки (путем многократного повторения заданного элемента движения рукоятки отображается приборами 13 и 15, шкалы которых проградуированы
ведикицах сипы. Аналогично работает устройство и при тренировке операто,ра на оптимальное усилие,вызванное тремором пальцев. При этом коммутатор 9 переводится в положение замыкания контакта 18 и дальнейший процесс работы устройства аналогичен (описанному. При проведении эксперимента оператор занимает свое рабо0чее место. Задача оператора состоит в том, чтобы, перемещая рукоятку органа ручного управления сжимай при этом чувствительный элемент, произвести выбор усилия сжатия (или уси ЛИЯ, вызванного тремором), при котором отсутствует противодействие движению рукоятки.
Таким образ.ом, конструкция устрой ства. обеспечивает исследования и предупрелодение мьтечной напряженности при механических перемещениях органов управления, что расширяет область использования устройства.
25
Формула изобретения
Устройство для исследования и тренировки мышечных усилий, содержащее последовательно соединенные датчик а1Ш1ечных усилий, чувствительный элемент, регулировочный клапан, дифференциальный датчик давления, амплитудный детектор, усилитель и коммутатор, соединенный с датчиком мышечных усилий, и два регистрирующих прибора, соединенные с датчиком мышечных усилий и дифференциальным датчиком давления соответственно,
40отличающееся тем, что, с целью исследования и предупреждения . мьшечной напряженности примеханических перемещениях органов упраления, S нем имеются последовательно
45 соединенные блок программирования
мышечных усилий, схема сравнения, усилитель и тормозной механизм, механи.чески соединенный с органом управления, и третий регистрирующий прибор,
50 соединенный с выходом схемы сравнения, причем второй вход схемы сравнения соединен с выходом коммутатора.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР. №556352, кл. G 01 L 1/02, 1977.
2. Авторское свидетельство СССР № 354447, кл. G 09 К 9/08, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования и тренировки мышечных усилий | 1981 |
|
SU1050660A1 |
| ЭРГОМЕТР | 1990 |
|
RU2015684C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ И НАПРАВЛЕННОЙ ТРЕНИРОВКИ НЕРВНО-МЫШЕЧНОГО АППАРАТА ЧЕЛОВЕКА | 1993 |
|
RU2107463C1 |
| Устройство для измерения усилий | 1975 |
|
SU556352A1 |
| Тензометрический кистевой динамометр | 1988 |
|
SU1706651A1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР И СИСТЕМА ПИСТОЛЕТ-МИШЕНЬ ДЛЯ НЕГО | 2008 |
|
RU2378600C1 |
| СПОСОБ ИССЛЕДОВАНИЯ СУСТАВНОГО ТРЕМОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2445922C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ СУСТАВНОГО ТРЕМОРА | 2009 |
|
RU2414853C1 |
| СПОСОБ ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195869C2 |
| СПОСОБ КОНТРОЛЯ РАДИОАКТИВНОГО ОБЛУЧЕНИЯ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2112993C1 |