Изобретение относится к спорту, к приспособлениям для оценки работоспособности спортсменов-пловцов.
Известно устройство для тренировки пловцов, содержащее установленную на основании тележку, несущую блоки, закрепленные под ее платформой, амортизатор, связывающий тележку с основанием, и рукоятки, при этом оно имеет ось, закрепленную в основании и две подпружиненных между собой штанги, один конец каждой из которых установлен свободно на оси, а на другом закреплена рукоятка, при этом блоки установлены с возможностью взаимодействия со штангами, а ось закреплена на основании под тележкой, блоки расположены с внешней стороны штанг, а ось установлена в основании перед тележкой, а блоки размещены между штангами (см. а.с. N 633534, кл. А 63 В 69/10, БИ N 23, 1978).
Недостаток этого устройства в том, что оно непригодно для тренировки пловцов, плавающих спортивным способом плавания кроль на груди и на спине, так как средство приложения усилий рук в нем не приспособлено для этой цели, а средство для движений ногами вообще отсутствует. К тому же устройство не содержит регитратора нагрузки.
Известно устройство для тренировки пловцов, содержащее установленную на раме опору для тела пловца, состоящую из горизонтального участка с ремнями для крепления пловца и наклонного к нему участка и средство для создания нагрузки на руки и ноги, при этом опора представляет собой двуплечий рычаг, ось поворота которого расположена перпендикулярно продольной оси устройства, плечи рычага подпружинены, один из ремней закреплен на свободном конце горизонтального участка опоры, а средство для создания нагрузки на руки содержит закрепленные на передней стойке рамы два амортизатора с захватами для кистей рук, а средство для создания нагрузки на ноги содержит рамку, смонтированную на задней стойке рамы и петли для размещения стоп, связанные с рамой через противоположно расположенные пружины (см. а.с. N 961723, кл. А 63 В 69/10, БИ N 36, 1982).
Недостаток этого устройства в том, что оно пригодно только для плавания способом баттерфляй (дельфин). Имитация нагрузки на руки и ноги далека от требований реального плавания, так как пружины в средстве для создания нагрузки на руки и на ноги воссоздают только нарастающую нагрузку. В реальном плавании динамика нагрузки иная - сначала она возрастает, а затем, после достижения максимума, падает. К тому же нагрузка в водной среде на гребущую конечность возрастает с ростом скорости движения конечности, а в устройстве эта зависимость не реализована.
Известно устройство для проведения эргометрических исследований, содержащее тренажер по а.с. N 768391, в котором дополнительно введены по следовательно соединенные вычислитель, блок сравнения, блок рекомендаций, блок выдачи данных, второй вход которого подключен к выходу блока сравнения, а третий вход - к выходу вычислителя, а также дополнительный блок памяти, включенный между входом блока индикации и вторым входом блока сравнения, при этом первый вход вычислителя соединен с выходом блока измерения нагрузки, а второй вход - с выходом блока выделения физиологических параметров (см. а.с. N 1149938, кл. А 61 В 5/22, БИ N 14, 1985).
Недостаток этого устройства в том, что оно не содержит средств приложения усилий, характерных для плавания в водной среде по параметрам спортивных стилей плавания.
Известна заявка Франции N 2356921, ИЗР, 1978 - эргометр с устройством передачи эффективного усилия, в котором имеется преобразователь, измеряющий момент вращения, создаваемый пользователем и преобразователь, имеющий скорость вращения. Перемножающее устройство определяет по этим двум параметрам приложенную на выходе прибора мощность.
Недостаток этого эргометра тот же, что и остальных - он способен реконструировать лишь усилия, прикладываемые к вращающимся педалям, т.е. основан на базе велотренажера, а это, как известно, не подходит для измерения и оценки работы и мощности пловцов, у которых движения не вращающиеся, а гребковые, при этом мускульная энергия затрачивается не только на работу ног, но и на работу рук.
В качестве прототипа принят велоэргометр, содержащий раму, педальный привод в виде ведущей и ведомой звездочек с расположенной в них цепью, имеющей нагруженную и свободную ветви, а также установленные на раме измерительный узел и связанные с ними контрольные приборы, при этом рама снабжена связанным с педалями приводом колес, измерительный узел выполнен в виде закрепленного на раме кронштейна, на котором с возможностью поворота установлена подпружиненная пластина с двумя роликами по краям, причем нагруженная ветвь цепи расположена между роликами и контактирует с их боковыми поверхностями, а один из роликов и подпружиненная пластинка связаны с контрольными приборами.
Недостаток прототипа в том, что он непригоден для измерения и оценки работоспособности пловцов, так как не имеет нагружателей для рук, а нижние педали его не позволяют моделировать гребковые движения пловца, измерительный узел не приспособлен для гребковых движений пловца руками и ногами.
Целью изобретения является повышение точности оценки физической работоспособности пловца путем измерения автономных усилий его каждой конечности в условиях, максимально приближенных к реальному плаванию.
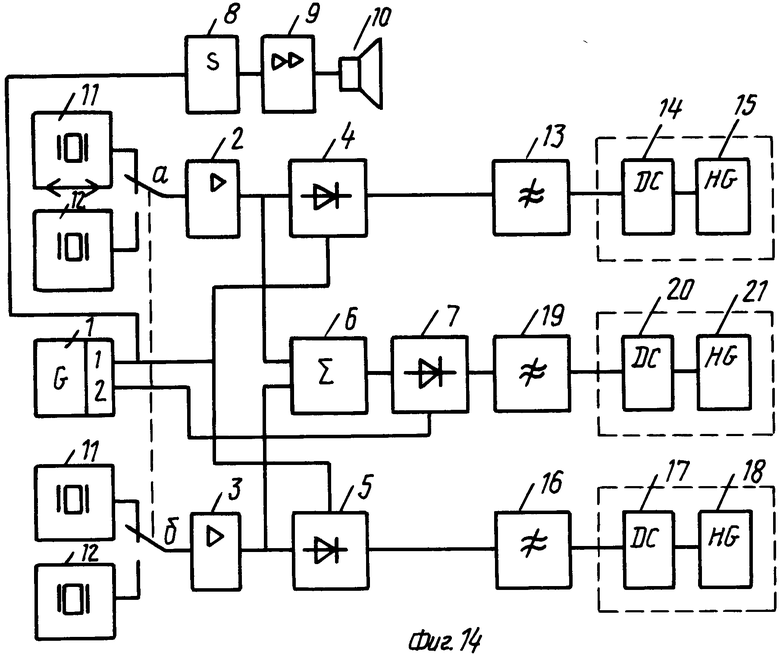
Цель достигнута тем, что в устройстве, содержащем основу со средством приложения усилий конечностей и связанный с ним измерительный узел, согласно предлагаемому изобретению закреплена шарнирно и подпружинена к основе двойная платформа для расположения пловца, а средство приложения усилий конечностей содержит нагружатель рук в виде имеющих рукоятки гибких тяг, подвешенных посредством двойных пружин и блоков к установленному на платформе трубчатому кронштейну, закрепленных и намотанных на подпружиненные посредством амортизационных жгутов барабаны, соосно смонтированные с помещенными в наполненные жидкостью емкости крыльчатки, и нагружатель ног в виде установленных на основе посредством подпружиненных кулачков телескопических штанг держателей стоп, при этом на трубчатом кронштейне установлен подголовник и блок измерительного узла, связанный с датчиками усилий рук, смонтированных в двойной проушине трубчатого кронштейна и с датчиками усилий ног, смонтированных на стыках телескопических частей штанг держателей стоп, а блок измерительного узла содержит таймер, первый выход которого подключен через одновибратор и усилитель мощности к звукоизлучающему устройству, и коммутатор с параллельными цепями, каждая из которых включает последовательно подсоединенные усилитель напряжения, одним входом амплитудный детектор, дешифратор и символьный индикатор, а выходы амплитудных детекторов объединены сумматором, выход которого через блок выборки-хранения и дешифратор подключен к выходу индикатора суммарной нагрузки, а второй выход таймера подсоединен к другому выходу блока выборки-хранения, а первый выход таймера соединен с другим выходом амплитудного детектора.
Существенными отличиями предлагаемого является то, что в этом устройстве достигнута имитация движения, а нагрузка рук и ног пловца наиболее приближена к реальному плаванию, а также обеспечено измерение усилий, прилагаемых пловцами к нагружателям рук и ног как автономно, от каждой конечности, так и суммарно от всех звеньев тела пловца. Важным качеством является также возможность без существенной переналадки не только обследования на данном эргометре пловцов любой спортивной специализации: кролистов, брассистов и баттерфляистов (дельфинистов), но и тренировки их, а также использование эргометра в силу его облегченной конструкции и возможности быстрой разборки и сборки не только в стационарных условиях обследования пловцов, но и на выезде - в местах тренировки, соревнований и обследований.
На фиг. 1 изображен эргометр, общий вид; на фиг.2 - стойка, продольный разрез; на фиг. 3 - кронштейн с подголовником и рукоятками, вид сбоку; на фиг. 4 - кронштейн с рукоятками, вид спереди; на фиг.5 - то же вид сверху с разрывами кронштейна и гибких тяг; на фиг.6 - ручной гидротормоз, вид снизу; на фиг. 7 - то же, поперечный разрез; на фиг.8 - то же верхний правый тормоз - открыт, нижний (левый) - схематично показаны тяги; на фиг.9 - ножной тормоз, продольный разрез; на фиг. 10 кулачок ножного тормоза, вид сбоку; на фиг.11 - то же, вид сзади, на фиг.12 - трубка нижнего тормоза, продольный разрез; на фиг.13 - держатель стопы, вид сбоку; на фиг.14 - электросхема эргометра; на фиг.15 - диаграмма работы.
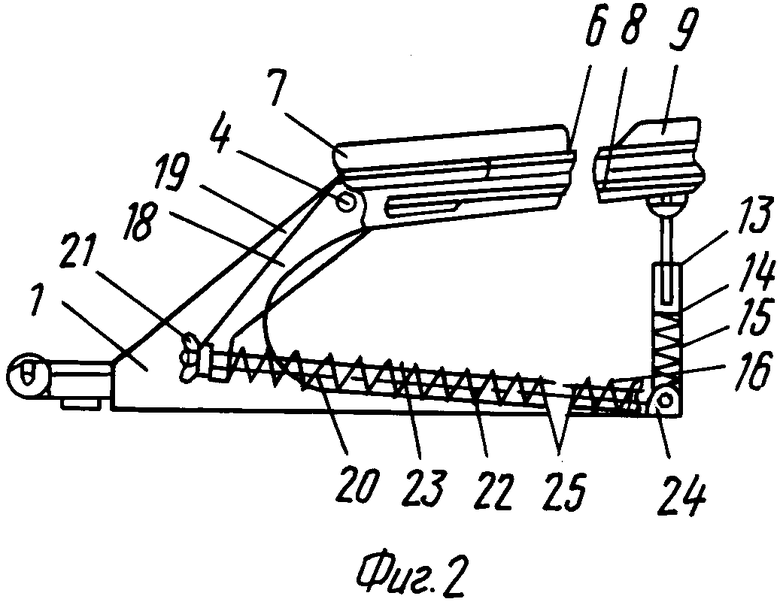
Конкретно эргометр содержит тренажер пловца и аппаратуру регистрации параметров физической нагрузки. Тренажер пловца имеет расположенную на основе стойку 1 стойку 2 с пружиной 3, с помощью которой посредством оси 4 к стойке присоединена обойма 5, в которой закреплен трубчатый кронштейн 6 в виде трубы, на которой сверху закреплена тазовая платформа 7 и насажена своей трубкой 8 грудная 9 платформа, зафиксированная зажимным винтом 10. На трубке грудной платформы, снизу имеется пружина 11, к которой крепится посредством чеки 12 телескопический амортизатор 13, состоящий из двух трубок с пружиной 14. Нижняя трубка 15 снизу проушиной 16 соединена осью 17 с основой, так что в нерабочем положении телескоп отбрасывается вперед - на пол (см. фиг.1).
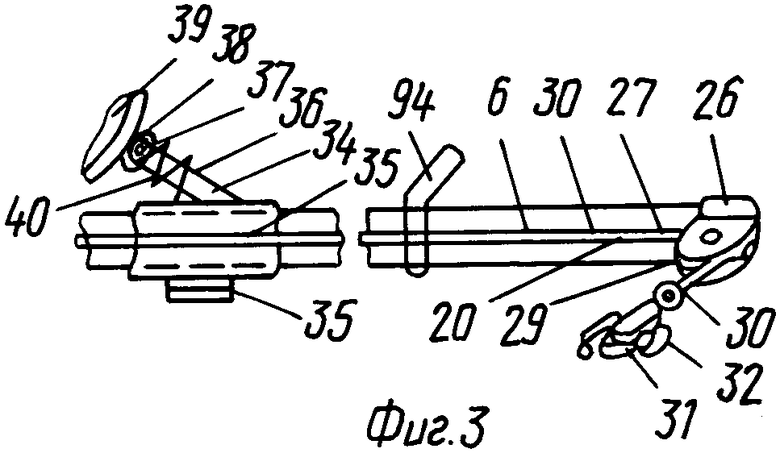
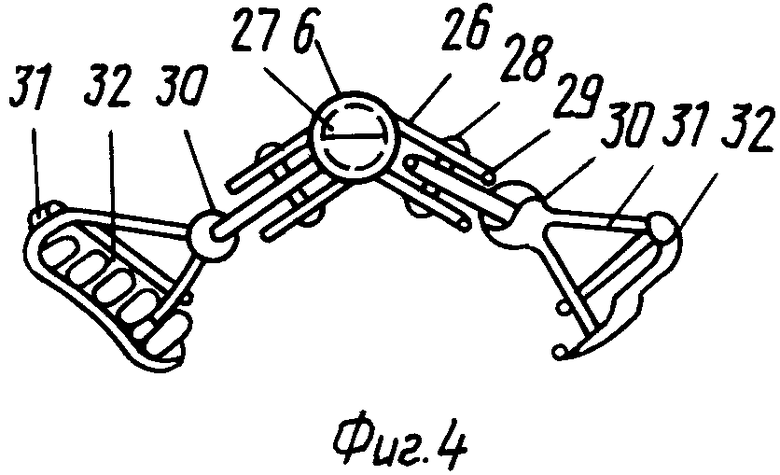
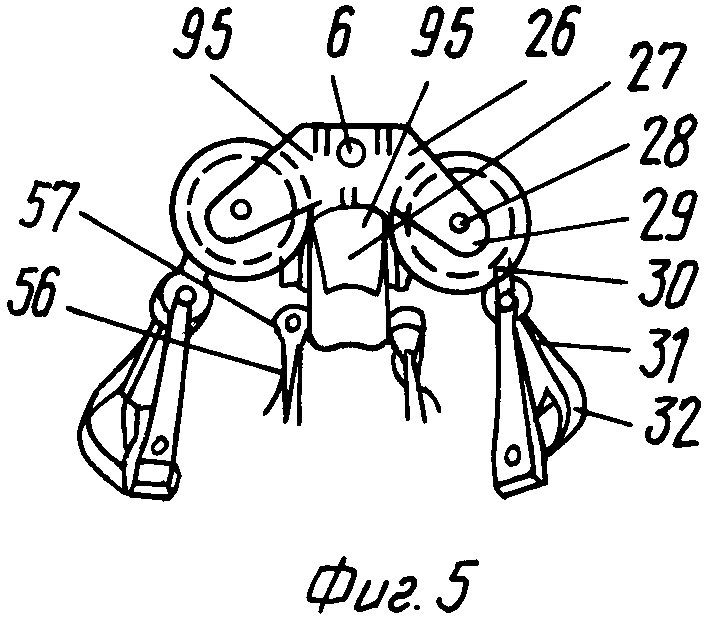
Трубчатый кронштейн сзади имеет хвостовик 18, в котором сверху имеется отверстие для оси (4) и снизу - второе - продольно для стержня 20 амортизатора. На конце стержня на резьбе навинчена опорно-регулировочная гайка 21. Стержень пропущен через пружину 22, закрепленную на основе и имеющую вертикальный вырез для стержня. Между хвостовиком и этой пружиной помещена пружина сжатия 23 (слабая), а между этой же пружиной и другой опорно-регулировочной гайкой 24 помещена (тоже насажена на стержень) другая пружина сжатия 25 (сильная). Спереди кронштейн имеет двойную пружину 26, помещенную своей цилиндрической основой 27 в торец трубы кронштейна с возможностью поворота вокруг продольной оси. В двойной пружине на осях 28 закреплены блоки-ролики 29, через которые перекинуты гибкие тяги 30, снабженные на концах рукоятками 31, с держателями 32 кистей в виде резиновых жгутов. На кронштейне насажена своей трубкой основой 33 стойка подголовника 34 с пружинным винтом 35. Стойка имеет на конце пружину 36, которая осью 37 соединена аналогичной пружиной 38, имеющейся на корпусе 39 подголовника, подпружиненного к стойке пружиной 40, имеющего мягкое покрытие.
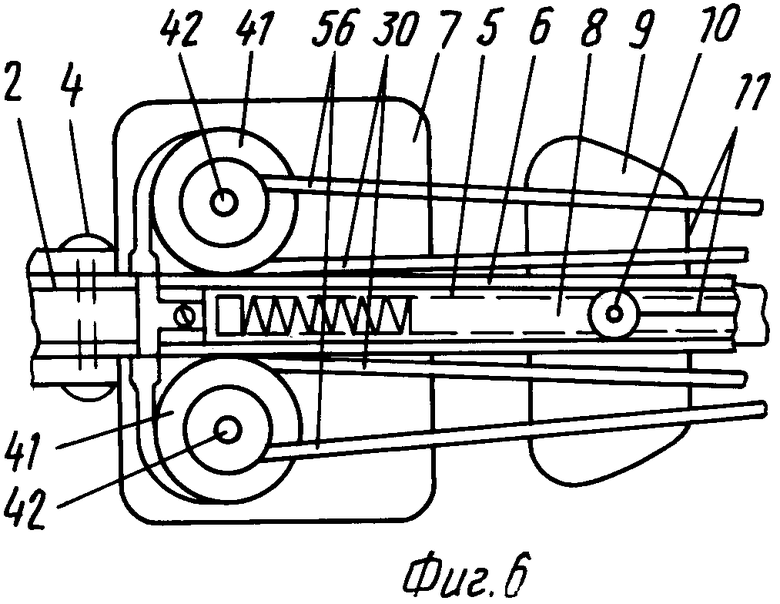
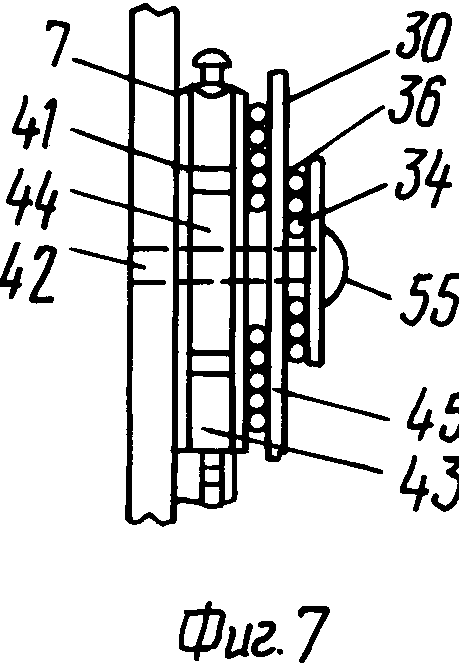
Под тазовой платформой размещен ручной гидротормоз, который имеет две чаши 41, заполненные тормозной жидкостью. В каждой чаше на оси 42 помещена крыльчатка с шарнирно установленными крыльями 43. Для этого на стержне 44 имеются диаметрально расположенные отверстия 45, в которых при помощи осей 46 установлены ее крылья.
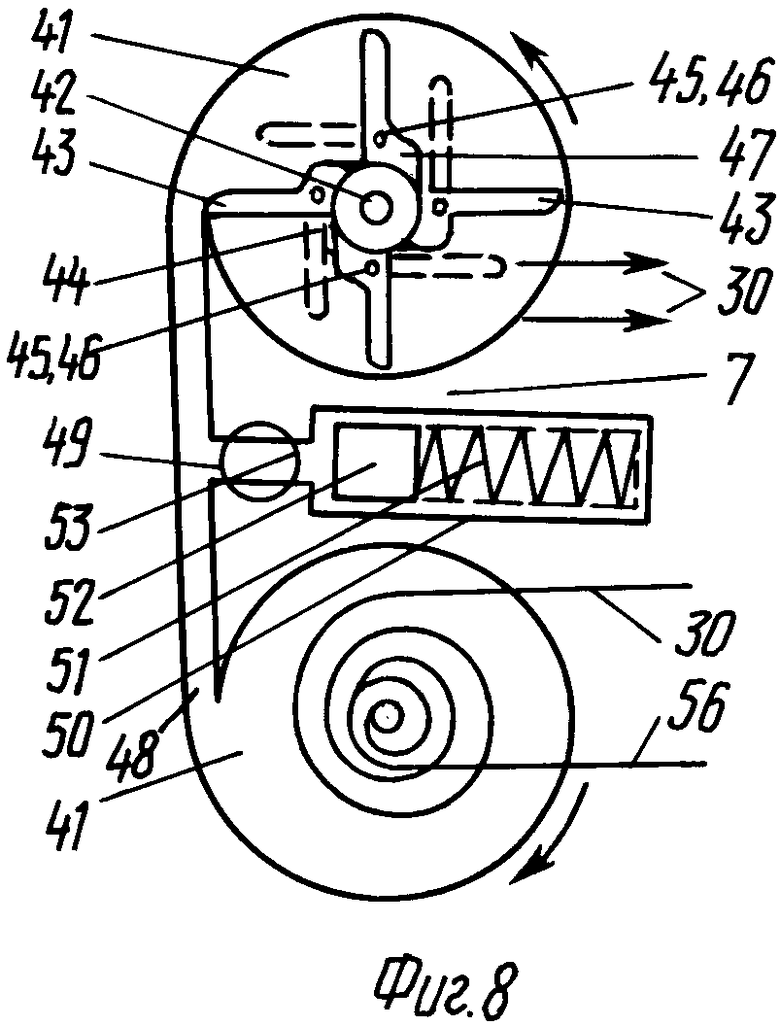
Каждое крыло имеет задний подпятник 47, который в рабочем положении крыла упирается в ступицу крыльчатки. Обе части соединены каналом-трубкой 48, которая связана продольной трубкой 49 с цилиндром 50, в котором помещен подпружиненный (пружина 51) поршень 52. Продольная трубка снабжена регулировочным вентилем 53. На оси каждой крыльчатки насажены и зафиксированы два барабана. Один со ступицей большого диаметра 54 - для закрепления и намотки гибкой тяги (30), а другой соосно расположенный, со ступицей 55 меньшего диаметра - для закрепления и намотки амортизационного резинового жгута 56, другой конец которого прикреплен к кронштейну спереди - к проушинами 57.
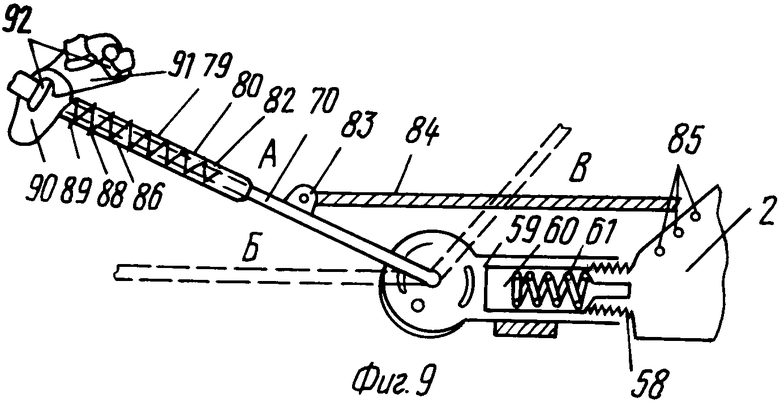
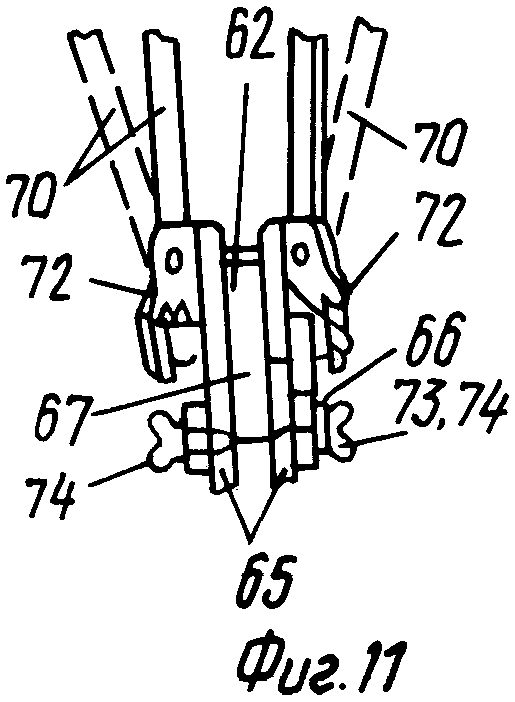
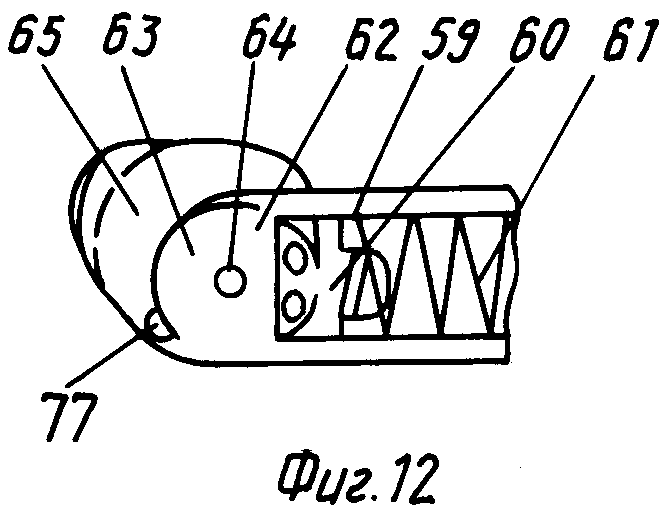
Ножной тормоз содержит трубку-хвостовик 58, закрепленную в стойке 2. На трубку-хвостовик, на внешнюю резьбу навинчена трубка-цилиндр 59, в которую помещен толкатель 60, подпружиненный пружиной 61. Посередине трубки цилиндра, вдоль нее закреплена проушина 62, в отверстии 63 которой помещена ось-палец 64. На этой оси с обеих сторон проушины (62) насажены свободно диски-кулачки 65 правый и левый (одинаково). Диски-кулачки придерживаются на оси-пальце накладками 66, имеющими отверстия 67 для насадки на ось-палец (64) и проушины 68 для закрепления при помощи осей 69 рычагов-стержней 70 телескопических штанг держателей ноги своими отверстиями 71. Каждый рычаг-стержень (70) подпружинен друг к другу (к середине) пружинами 72, установленными в верхней части каждой накладки (60) и упирающимися в короткие плечи рычагов-стержней (70).
На другом конце каждой накладки (66) имеется резьбовое отверстие 73, куда ввинчен стопорный винт-палец 74, для которого на каждом диске кулачке имеются три резьбовые отверстия 75 для кроля на груди, 76 - для кроля на спине, 77 - для брасса. Накладки удерживателя на оси-пальце (64) гайками 78. Каждая штанга-держатель ноги имеет помимо рычага-стержня (70), насаженную на него телескопическую трубку 70 и пружину 80 для подпружинивания держателя.
Вдоль трубки имеется продольный вырез 81, куда помещен и ввинчен в рычаг стержень, фиксирующий винт 82.
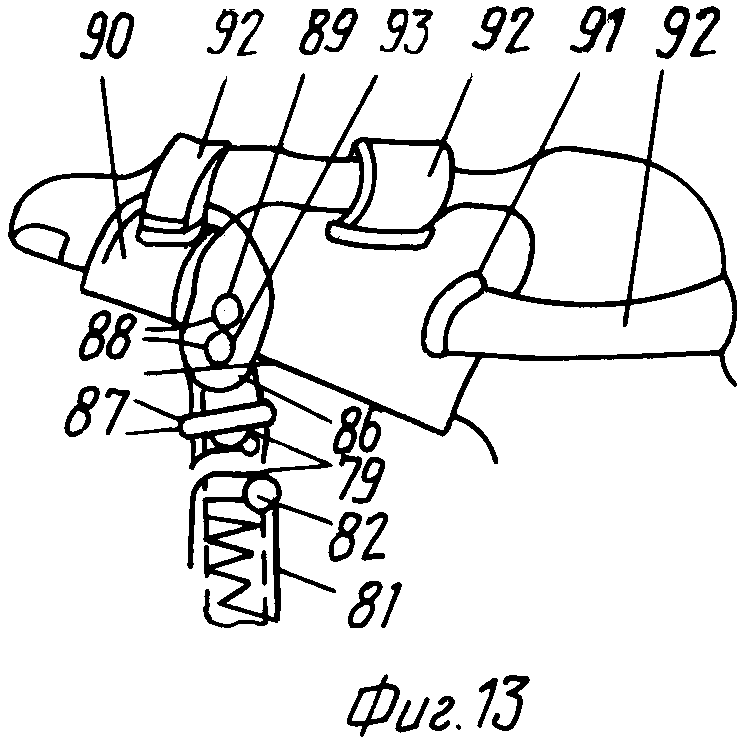
На рычаге-стержне имеется проушина 83, к которой присоединен амортизационный жгут 84, другим концом крепящийся в одно из отверстий 85 (на стойке). На свободном конце телескопической трубки (79) закреплена вращающаяся вокруг продольной оси проушина 86 с фланцем 87. Эта проушина соединена осью 88 с проушинами 89 пальцевой 90 и подъемной 91 опор держателей стопы, снабженных крепежными ремнями 92. Между фланцем (87) и телом пальцевой и подъемной опор насажена на тело вращающейся пружины 86 пружина 93, обеспечивающая стабилизацию держателя стопы.
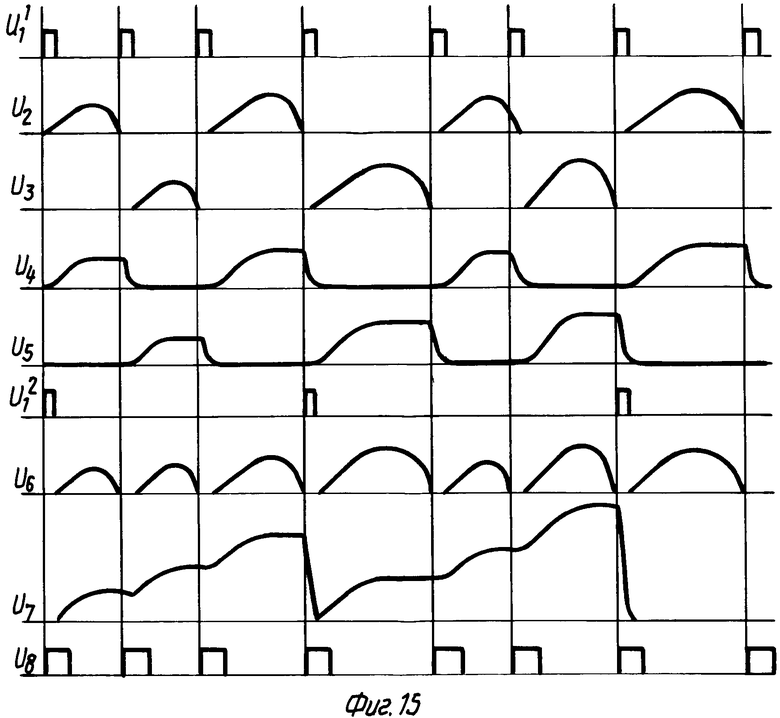
Электрическая схема содержит датчики нагрузки (ручные и ножные) задающие регистрирующий блок (см. фиг.14) и диафрагмы его работы (см. фиг.15).
Пользуются эргометром следующим образом. Пловец располагается на тазовой 7 и грудной 9 платформах, вставляет ноги стопами в держатели и закрепляет их ремнями 92. Руками захватывает рукоятки 31, вставляя кисти рук под резиновые жгуты держателей 32.
Пловец имитирует плавание на тренажере, а затраченная им энергия регистрируется на блоке регистрации в 4-х режимах: кроль на груди, кроль на спине, баттерфляй на груди, брасс на груди.
Кроль на груди - положение пловца показано на фиг.1. При гребке правой рукой рукоятка 31 подается вниз назад, что обусловливает протяжку гибкой тяги 30. Эта тяга сматывается со ступицы 54 большого барабана и вращает ступицу 44 крыльчатки, крылья 43 которой перемещаются вслед за вращением ступицы и перемещают тормозную жидкость, гонят ее по каналу-трубке 48 через вентиль 53 в цилиндр 50, отжимая поршень 52 и сжимая пружину 51. Чем интенсивнее спортсмен подает рукоятку при гребке, тем большее сопротивление получит крыльчатка и гибкая тяга с рукояткой. Торможение, обеспечиваемое крыльчаткой, усиливается еще и тем, что при сматывании гибкой тяги при гребке одновременно с ним наматывается резиновый жгут 56 на ступицу барабана малого диаметра 55 и натяжение этого амортизатора возрастает. После завершения гребка пловец быстро подает правую руку вперед - выполняет пронос для очередного гребка. Пронос обеспечивается тем, что натянутый амортизатор (жгут) 56 высвобождается и резко вращает малую ступицу 56, а с ней и ступицу 44 крыльчатки в обратную сторону (т.е. по часовой стрелке, см. фиг.8 сверху). Крыльчатка в этом случае торможения не оказывает, т.к. ее крылья 43 складываются под напором жидкости - они проворачиваются на своих осях 46. Ускорению возвращения рукоятки 31 в исходное положение способствует также и пружина 51, которая выжимает жидкость из цилиндра 50 и подает ее в чашу 41 правой стороны тормоза.
Аналогично работает и левая сторона гидротормоза при работе левой рукой 31.
При большой частоте гребков, когда гребок очередной рукой начинается при еще не закончившимся гребке предыдущей руки, т.н. "сцепление" в технике плавания, жидкость в цилиндр нагнетается из обеих чаш 41 и в обе чаши она выжимается пружиной 51 в периоды движения той или иной рукоятки 31 вперед - в исходное положение.
Так имитируется гребковое движение рук, обеспечивается и траектория рук без какого-либо ограничения и торможения их в соответствии с законами гидравлики, характерными для сопротивления в водной среде. Все это обеспечивает наибольшее приближение к реальному плаванию.
Ногами пловец работает так, как требует техника плавания стилем кроль на груди. При гребке правой ногой - т.е. при движении ее стопы вниз назад в этом же направлении подается держатель стопы, а с ним телескопическая трубка 79 и рычаг-стержень 70 и проворачивается против часовой стрелки правый кулачок 65. При этом нагрузка на ногу увеличивается, поскольку кулачок выходит в упор в толкатель 60 и пружина 61, воздействующая на него через кулачок 65. Так осуществляется гребок правой ногой - и также - левой, только при взаимодействии деталей левого держателя ноги.
Совместное движение обеих ног отличается тем, что в процессе перемещения вниз-назад правой ноги (при гребке) толкатель 60 утапливается вправо и высвобождает левый кулачок 65, нагрузка с которого снижается. Возникает эта нагрузка на левом держателе только тогда, когда правый держатель будет проходить вторую половину пути - от среднего положения до исходного - верхнего положения. То же явление будет иметь место и при противоположных движениях, левый гребок, правый занос. Таким образом и левая и правая нога будут при попеременной работе имитировать нагрузку торможения только начиная со средней части траектории гребка каждой ногой и заканчивается до ее движения вниз-назад, что и требуется по технике плавания.
Кроль на спине - пловец располагается спиной на тазовой 7 и грудной 9 платформах, ноги вставляет под ремни 92 держателей стоп, кладет их подошвами на пальцевую 90 и подъемные опоры. Кисти вставляют в рукоятки 31 большими пальцами наружу. Плывет так, как требуется по технике плавания кролем на спине.
Взаимодействие деталей гидротормоза при работе руками аналогично работе при кроле на груди. Работа ног отличается. Держатели ног переводятся в позицию Б, когда накладки 66 переводятся против отверстий 76. Для этого стопорные винты-пальцы 74 вывинчиваются из отверстий 75 и ввинчиваются в отверстия 76, имеющиеся на кулачках 65. Теперь усилия ног прикладываются не вниз-назад, как было при позиции А в кроле на груди, а вверх вперед, что требуется при кроле на спине при позиции Б. В остальном работа и обеспечение торможения обеих ног, в том числе и при их совместном действии ничем не отличается от взаимодействия при кроле на груди. Амортизационный резиновый жгут 84, как и при кроле на груди, способствует совместно с пружиной 80 удержанию ноги пловца на весу, имитируя плавучесть ног в воде в пассивной фазе движения.
Баттерфляй (дельфин) на груди - обеспечивается также как и кроль на груди, только руки работают совместно, т.е. пловец правой и левой ногами, правой и левой руками работает одновременно, а не попеременно как в кроле. В этом стиле плавания пловец работает и туловищем - он сгибается и разгибается в тазобедренных суставах и пояснице при каждом гребке руками и ногами. Это обеспечивается тем, что обойма 5 с кронштейном 6 для баттерфляя дополнительно подпружинивается. Если при кроле и брассе платформы 7 и 9 подпружинивались в основном за счет пружины сжатия 26 (сильной) амортизатора. Это пружина сжималась и уравновешивалась вес пловца, придавая ему требуемую позу, лежа с несколько приподнятой головой (см. фиг.1). Требуемая регулировка осуществлялась опорно-регулировочной гайкой 21, что при баттерфляе (дельфине) недостаточно. Поэтому под грудную платформу 9 подводится телескопический амортизатор 13 и крепится в проушине 11 посредством чеки 12. Этот амортизатор с пружиной 14 совместно с пружинами 23 и 25 обеспечивают раскачивание тела пловца при сгибаниях и разгибаниях пловца и тазобедренных суставах и в пояснице, имитируя реальное плавание. Остальные взаимодействия деталей аналогичны кролю.
Брасс на груди - взаимодействие деталей при работе рук описано в предыдущем разделе - оно отличается от кроля тем, что гребок осуществляется одновременно двумя руками по иной траектории, но и это вполне обеспечивается предлагаемым тренажером.
Работа ног иная - пловец осуществляет "отталкивания" одновременно двумя ногами сначала разводя, а затем вновь сводя их вместе. Для этого держатели ног устанавливаются в позицию В - отверстия 77 на кулачках 65. Стопорные винты-пальцы вывинчиваются из отверстий 75 и вывинчиваются с поворотом накладок 66 в отверстия 77. Стопы ног закрепляются ремнями 92 так же, как и при кроле на груди (см. фиг.13). Амортизационный резиновый жгут 84 подтягивается и закрепляется в более отдаленное отверстие 85 для увеличения нагрузки. Разведение и последующее сведение ног обеспечивается тем, что рычаг-стержни 70 отводятся в стороны и приводятся друг к другу благодаря пружинами 68, которые обеспечивают передачу усилия спереди назад и одновременно дают возможность обеспечить эту передачу усилий при разведении и сведении ног, что характерно для плавания брассом. Пружины 72 этих проушин способствуют этому.
Регулировка - по линии рук выдвижением и фиксирование грудной платформы 9 на кронштейн 6 зажимным винтом 10. По длине ног - перемещением телескопической трубы 79 на рычаге-стержне 70. По весу тела спортсмена - навинчиванием или свинчиванием опорно-регулирующих гаек 21 и 24 амортизатора. По нагрузке на руки - поворотом вентиля 53 (перекрытием или открытием просвета канала трубки 47. По нагрузке на ноги навинчиванием или свинчиванием трубки цилиндра 59) поджатием или ослаблением пружины 61 толкателя 60), а также подтягивание или ослаблением резинового амортизационного жгута 84, закреплением его конца в одном из отверстий 85.
Теперь, когда принцип работы устройства, как тренажера, моделирующего действия пловца при всех известных способах плавания, описан, можно перейти к описанию систем регистрации усилий спортсмена, без чего никакой эргометр немыслим. Разберем устройство и работу измерительного узла эргометра (см. фиг.14 и фиг.15).
Электрическая схема измерительного узла работает следующим образом. С помощью задающего генератора 1 вырабатываются импульсы ритма (см. фиг.14, 15), которые расширяются одновибратором 8, усиливаются усилителем мощности 9 и воспроизводятся звукоизлучающим устройством 10. Частота ритмических сигналов U11 регулируется. Эти сигналы воспринимаются пловцом на слух, что позволяет ему выполнять гребковые движения руками и ногами в такт с ними.
При выполнении движения, например, правой рукой или ногой, на выходе соответствующего видоэлемента 11, 12, появляется напряжение U2, которое усиливается зарядовым усилителем 2 и подается на амплитудный детектор 4. Амплитудный детектор фиксирует максимальное значение поступающего на него напряжения и сохраняет его на весь период выполнения одного гребка (см. диаграмму U4). Для этого амплитудный детектор выполнен со сбросом. Сброс детектора осуществляется импульсами U11 в течение длительности этих импульсов. Амплитудный детектор может быть, выполнен так, как описано в книге Щербакова В. И., Грездова Г.И. Электронные схемы на операционных усилителях: Справочник - К.: Техника, 1983, на с. 169-173.
Напряжение U4 снимаемое с выхода амплитудного детектора 4 интегрируется фильтром 13 нижних частот для устранения высокочастотных составляющих сигнала и поступает на преобразователь 19 уровня, нагруженный на шкальный индикатор 15. В качестве преобразователя уровня, может быть использована, например, интегральная микросхема типа КР 1534 ПП2 (ТУ бКО 348.927-02), а в качестве шкального индикатора - вакуумно-люминесцентный, типа НЛТ6-30М (12МО.081.131ТУ).
Одновременно, напряжения U2 и U3, снимаемые с зарядовых усилителей 2, 3 суммируются сумматором 6 (см. диаграмму U6) и подаются на третий амплитудный детектор 7. Сброс детектора 7 производится импульсами U12, снимаемыми со второго выхода задающего генератора 1. Частота импульсов U12 регулируется и значительно ниже частоты гребков. Это позволяет фиксировать суммарный уровень напряжения за много гребков обеими руками или ногами (см. диаграмму U7).
Таким образом, на индикаторе 15 можно регистрировать усилие, приложенное одной рукой, а на индикаторе 18 - другой. После переключения посредством коммутатора эти же показатели можно регистрировать и при работе ног. Кроме того, можно получить суммарные усилия как руками, так и ногами за определенное время работы пловца, для чего служит индикатор суммации 21. Выходом для эргометра должна быть работа и мощность. В заявке, например, Франции N 2356921 эти величины получены путем перемножения момента вращения (сила) на частоту вращения педалей (скорость). Поскольку в нашем устройстве вращение отсутствует, искомые величины получены не переумножением, а суммированием по цепочке 6-7-19-20-21.
Тут достигнут тот же результат за определенное время работы пловца - общий итог работы за n число гребков руками и ногами. Мощность же получена путем простого деления (не требующего механизмов) на время работы. При этом можно иметь и работу и мощность каждой руки, каждой ноги, двух рук, двух ног и, наконец, результат в целом (фиг.14,15).
Полагаем, что предлагаемый эргометр послужит ценным подспорьем для исследования действий пловцов различной спортивной специализации. Полученные с помощью эргометра данные можно использовать в учебно-тренировочном процессе при подготовке пловцов различной классификации. Таким образом, эргометр потребуется прежде всего для экспериментальной цели. Однако, если он содержит политренажер - легкий, разборный, переносной, рассчитанный на работу пловцов кролистов, брассистов, дельфинистов - то в качестве тренажера он потребуется спортивному коллективу и для детей, и для взрослых, и для тренировки, и для обучения плаванию. Хорошим бесшумным тренажером он послужит также любителям физкультуры в домашних условиях в роли велотренажера, но с более широким диапазоном возможных физических упражнений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1567228A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1600814A1 |
| Устройство для тренировки пловцов | 1989 |
|
SU1646560A1 |
| Устройство для тренировки спортсменов | 1983 |
|
SU1151249A1 |
| Устройство для тренировки пловцов | 1979 |
|
SU874081A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1395343A1 |
| Устройство для тренировки пловцов-брассистов | 1987 |
|
SU1443905A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1378873A1 |
| Приспособление для плавания | 1985 |
|
SU1258449A1 |

Сущность изобретения: устройство содержит стойку 2, пружину 3, ось 4, кронштейн 6, тазовую платформу 7, грудную платформу 9, зажимный винт 10, пружину 11, амортизатор 13, нижнюю трубку, хвостовик, стержень, регулировочную гайку, пружину, цилиндрическую основу, блоки-ролики, гибкие тяги, рукоятки, держатели, стойку подголовника, пружинный винт. 15 ил.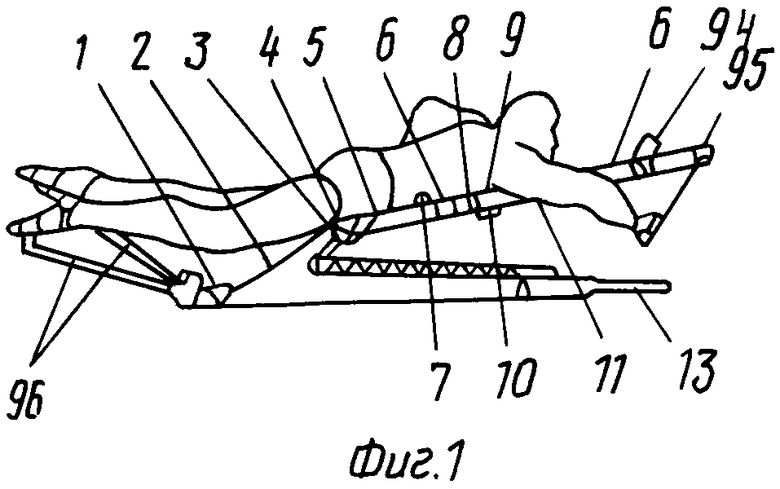
ЭРГОМЕТР, содержащий основание с установленным на нем средством приложения усилий конечностей испытуемого, расположенного на платформе, датчики усилий конечностей испытуемого, установленные на основании телескопические штанги с подпружиненными кулачками и блок измерения и индикации усилий конечностей испытуемого, отличающийся тем, что, с целью повышения точности оценки физической работоспособности испытуемого путем имитации условий выполнения плавательных упражнений, он снабжен расположенными в наполненных жидкостью емкостях крыльчатками с соосно закрепленными в них подпружиненными барабанами, установленными на платформе подголовником и дополнительными датчиками усилий конечностей испытуемого, средство приложения усилий конечностей испытуемого содержит нагрузочный узел для рук, выполненный в виде имеющих рукоятки гибких тяг, укрепленных с возможностью поступательного движения, и нагрузочный узел для ног в виде держателей стоп ног, а блок измерения и индикации усилий конечностей испытуемого содержит задающий генератор, последовательно включенные одновибратор, усилитель мощности и громкоговоритель, сумматор, коммутатор и цепи из последовательно включенных амплитудного детектора, фильтра нижних частот и узла индикации усилий конечностей испытуемого, при этом держатели стоп ног кинематически связаны с подпружиненными кулачками телескопических штанг, на стыках частей которых размещены основные и дополнительные датчики усилий конечностей испытуемого, гибкие тяги жестко закреплены на подпружиненных барабанах, а платформа подпружинена и шарнирно установлена на основании, причем первый выход задающего генератора соединен с входом одновибратора и управляющими входами первого и второго амплитудных детекторов, выходы датчиков усилий конечностей испытуемого связаны с входами коммутатора, выходы которого соединены с входами первого и второго амплитудных детекторов и входами сумматора, выход которого подключен к входу третьего амплитудного детектора, причем второй выход генератора соединен с управляющим входом третьего амплитудного детектора.
| Велоэргометр | 1984 |
|
SU1192783A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
