1
Изобретение относится к рентгенотехнике, а более конкретно - к вычислительным рентгеновским томографам, используемым в медицине для диагностических целей.
Известен рентгеновский томограф, содержащий источник узкого пучка, точечный детектор излучения и систему сканирования, включающую средства совместного линейного перемещения источника и детектора вдоль исследуемого объекта и средства их совместного поворота на заданный угол после прохождения цикла линейного сканирования 1 ,
Недостатком этого устройства является сложность системы сканирования, обусловленная двумя типами совершаемого движения - линейным и круговым.
Наиболее простой, с точки зрения движения составляющих ее элементов, является томографическая установка, содержащая поворотный источник и неподвижное кольцо детекторов, расположенное концентрично с окружностью, по которой перемещается источник, и снаружи ее 2 .
Недостатком этой системы является необходимость учета различий в чувствительности составляющих кольцо детекторов, что существенно осложняет обработку результатов измерений.
Известен также рентгеновский-томоtoграф, содержащий трубку с прострельным анодом в виде части кольца, расположенным по окружности сканирования, многощелевой коллиматор, сводящий получаемый на аноде пучок в узкий
15 пучок, направленный на точечный детектор 3 .
Недостатком этого устройства является использование специализированного источника рентгеновского излуче20ния сложной конструкции.
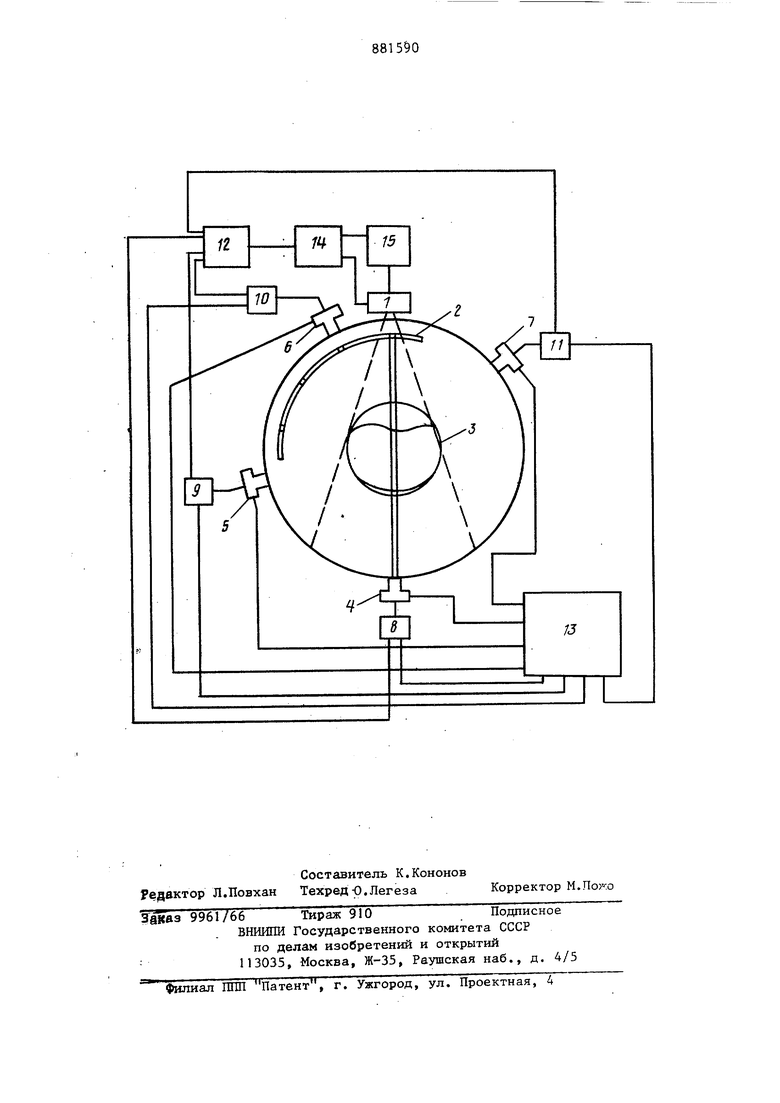
Наиболее близким техническим решением к предлагаемому является рентгеновский вычислительный томограф. содержащий источник веерного рентгеновского пуска, многощелевой коллиматор, количество щелей в котором равно, по крайней мере, требуемому количеству совокупностей траектории пучка в исследуемом объекте, держатель исследуемого объекта, детектор излучения с подключенной к нему схемой формирования начала и окончания съемки одной совокупности траектории, привод перемещения источника и многощелевого коллиматора по окружности, в центре которой расположен держатель исследуемого объекта, таким образом, чтобы выделяемый из веерного пучка источника щелевым коллиматором пучок попадал на неподвижный детектор, привод шагового перемещения детектора, блок управления источником веерного рентгеновского пучка, средства обработки сигналов детектора и восстановления изображения 4 . В известном устройстве после каждого цикла съемки одной совокупности траекторий детектор перемещается по окружности на расстояние, равное раствору веерного пучка. При этом движение источника и коллиматора пре кращается. Для точного начала следующего цикла размеры между щелями кол лиматора должны быть строго выдержаны. В противном случае совместный пр вод перемещения источника и коллиматора надо расцеплять и доводить следующую щель коллиматора в нужное положение. Все это усложняет систему управления устройством. Цель изобретения - упрощение системы управления аппаратом. Поставленная цель достигается тем что в рентгеновский вычислительный томограф,.содержащий высоковольтный генератор, источник веерного рентгеновского пучка, установленные на пути первичного пучка многощелевой кол лиматор, количество щелей в котором, по крайней мере, равно требуемому количеству совокупностей траектории измерения, и держатель исследуемого объекта, детектор излучения с подключенной к нему схемой формирования сигнала начала и окончания съемки одной совокупности траектории, приво синхронного перемещения источника и многощелевого к-оллиматора по окруж ностям, Б центре которых расположен держатель исследуемого объекта с раз личными угловыми скоростями, блок управления источником, подключенный к высоковольтному генератору и приводу.перемещения источника и коллиматора, средства обработки сигналов детектора и восстановления И13ображения, дополнительно введены детекторы со схемами формирования сигнала начала и окончания съемки совокупности траектории, причем общее коли ество детекторов, по крайней мере, равно требуемому количеству совокупностей траекторий, и блок идентификации сигналов .начала и окончания съемки одной совокупности траектории, к входу которого подключены выходы схем, формирования указанных сигналов , а выход которого соединен с блоком управления источником. На чертеже представлен рентгеновский вычислительный томограф. Рентгеновский вычислительный томограф содержит источник веерного рентгенов.ского пучка 1 , многощелевой коллиматор 2, количество щелей в котором не меньше требуемого к,оличества совокупностей траекторий Измерений, держатель исследуемого объекта 3 и неподвшкные детекторы 4-7, количество которых в данном случае равно количе- ству щелей в коллиматоре 2, В любом случае количество детекторов не меньше требуемого количества совокупностей траекторий. Детекторы расположены по окружности вокруг объекта на угловом расстоянии друг от друга, измеряемом по окружности с центром в фокусе источника, не меньшем угла раствора веерного дучка источника 1. Для того, чтобы детекторы не препятствовали движению источника 1, они могут быть расположены на окружности большего радиуса нежели окружность, по которой перемещается источник 1. С каждым детектором 4-7 соединена схема формирования сигнала начала и окончания съемки одной совокупности траекторий 8-11. Эти схемы одним выходом подключены к блоку 12 идентификации сигналов этих схем, а другим к средствам обработки сигналов детекторов и восстановления изображения 13. Выход блока 12 соединен с блоком 14 управления источником рентгеговского пучка 1, который управляет включением и выключением генератора 15 и перемещением источника 1 и коллиматора 2 (конструкция привода не показана - в целом она аналот-ична известной).
Томограф работает следующим образом.
Во время совместного перемещения источника и щелевого коллиматора последний из веерного пучка вырезает узкий пучок, которьш попадает на неподвижный детектор 4. Когда щель коллиматора 2 пройдет все сечение веерного пучка, схема 8 выработает сигнал окончания съемки одной совокупности траектории. Одновременно или с некоторым сдвигом по времени в веерный, пучок входит следующая щель коллиматора 2, которая направляет пучок на детектор 5. Схема 9 формирует сигнал начала следующей съемки совокупности траектории, осуществляемой с помощью детектора.5. Такая процедура повторяется до съем ки требуемого количества совокупностей траектории. Сигналы начала и окончания съемок совокупностей траекто.рий поступают в средства обработки сигналов детекторов, в которых они используются для индикации начала и окончания цикла обработки сигналов, относящихся к каждой совокупности траекторий.
Кроме того, эти сигналы поступаю.т в блок 12, который идентифицирует cifналы, т.е. определяет, является ли поступающий на него сигнал сигналом начала или окончания, и в зависимости от результатов идентификации посылает управляющий сигнал на блок 14 управления генератором 15 и приводом движения источника 1 и коллиматора 2
Таким образом, в данной схеме отсутствует движение детекторов, что позволяет исключить привод поворота и средства синхронизации поворотов детектора с началом и окончанием циклов съемки совокупностей траекторий. Кроме того, привод перемещения ис точника 1 и коллиматора 2 может теперь не подвергаться расцеплению во время исследования обьекта, что также упрощает управление устройством.
Кроме того, в томограф может быть введена схема, производящая включение детектора перед началом съемки им совокупности траекторий и выключающая его по окончании цикла съемки (не показана) . Этой схемой управляет блок 12 и схемы 8-П формирования сигналов начала и окончания съемки одной совокупности траекторий, причем включение каждого детектора, кроме .первого, производится ITO сигналу окочания цикла съемки предьвдущей совокупности траекторий, поступающему через блок 12, а выключение -по сигналу соответствующей схемы 8-11.
Формула изобретения
Рентгеновский вычислительный томограф, .содержащий высоковольтный генератор, источник веерного рентгеновского пучка, установленные на пути первичного пучка, многощелевой кол;;лиматор, количество щелей в котором,
по крайней мере, равно требуемому количеству совокупностей траекторий измерения, и держатель исследуемого объекта, детектор излучения с под.т ключенной к нему схемой формирования
сигнала начала и окончания съемки одной совокупности траекторий, привод синхронного перемещения источника и многощелевого коллиматора по окружностям, в центре котор к расположен держатель исследуемого объекта с различными угловыми скоростями, блок управления- источником , подклю ченный к высоковольтному генератору и приводу перемещения источника и коллиматора, средства обработки сигналов детектора и восстановления изображения, отличающийся тем, что, с целью упрощения системы управления аппаратом, в него дополнительно введены детекторы со схемами
формирования сигнала начала и окончания съемки совокупности траекторий, причем общее количество детекторов, по крайней мере, равно требуемому количеству совокупностей траекторий,
и блок идентификации сигналов начала и окончания съемки одной совокупности траекторий, к входу которого подключены выходы схем формирования указанных сигналов, а выход которого соединен с блоком управления источником.
Источники информации, принятые во внимание при экспертизе
1.Патент Великобритании
№ 1283915, кл. Н 5 R, опуб.гшк. 1972.
2.Заявка Франции № 2365329, кл. А 61 В 6/02, опублик. 1978.
3- Выложенная заявка ФРГ № 2822241, кл. А 61 В 6/00, опуб,ЛИК. 1978.
4. Авторское свидетельство СССР по заявке № 2839522/18-25, кл. G 01 N 23/08, 1979 (прбтотип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычислительной рентгеновской томографии | 1980 |
|
SU873065A1 |
| Способ вычислительной рентгеновской томографии и рентгеновский томограф для осуществления способа | 1979 |
|
SU857815A1 |
| УЛЬТРАМАЛОУГЛОВАЯ РЕНТГЕНОВСКАЯ ТОМОГРАФИЯ | 1998 |
|
RU2145485C1 |
| УСТРОЙСТВО ДЛЯ МАЛОУГЛОВОЙ МАММОГРАФИИ (ВАРИАНТЫ) | 1998 |
|
RU2171628C2 |
| Эмиссионно-трансмиссионный вычислительный томограф | 1983 |
|
SU1153885A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА В РАССЕЯННОМ И/ИЛИ ПРОШЕДШЕМ ИЗЛУЧЕНИИ | 2004 |
|
RU2256169C1 |
| УСТРОЙСТВО ДЛЯ МАЛОУГЛОВОЙ МАММОГРАФИИ (ВАРИАНТЫ) | 1997 |
|
RU2173087C2 |
| СПОСОБ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 1998 |
|
RU2172137C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТАВА И СТРУКТУРЫ НЕОДНОРОДНОГО ОБЪЕКТА (ВАРИАНТЫ) | 1997 |
|
RU2119660C1 |
| Способ вычислительной томогра-фии и ТОМОгРАф для ЕгО РЕАлизА-ции | 1979 |
|
SU807173A1 |