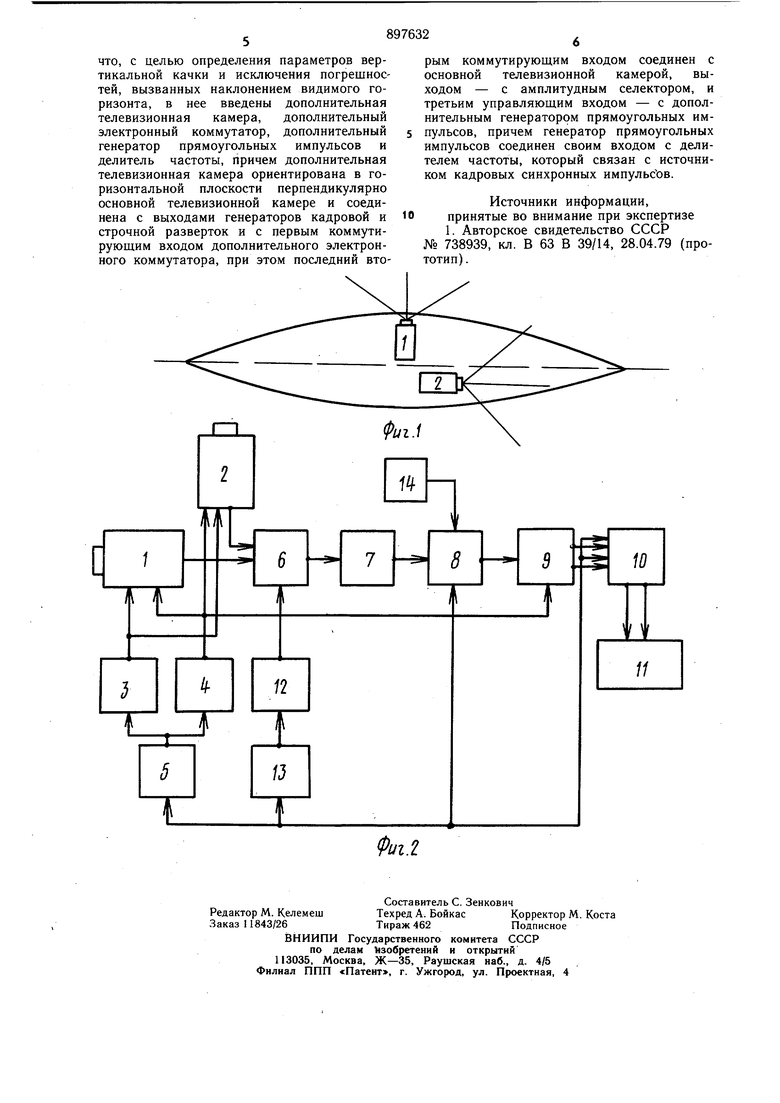
На фиг. 1 изображена схема расположения телевизионных камер; на фиг. 2 - блок-схема предлагаемой установки.
Установка состоит из телевизионных камер 1 и 2, соединенных с генераторами кадровой 3 и строчной 4 разверток, которые связаны с источником 5 кадровых синхронных импульсов. Телевизионные камеры 1 и 2 соединены с коммутирующими входами электронного коммутатора 6, который через амплитудный селектор 7, электронный ключ 8, электронный коммутатор 9 соединен со счетным устройством 10, которое связано с электронно-вычислительным устройством 11. Электронный коммутатор б управляющим входом соединен со вторым генератором 12 прямоугольных импульсов, причем последний соединен своим входом с делителем 13 частоты, который соединен с источником 5 кадровых синхронных импульсов, со счетным устройством 10 и с эжктронным ключом 8, при этом последний связан с генератором 14 калиброванных импульсов.
Установка работает следующим образом.
Сканирующий луч на обеих телевизионных камерах 1 и 2 отъюстирован в точку, которая в исходном положении совпадает с линией видимого горизонта. При включении установки автоматически происходит включение источника 5 кадровых синхроимпульсов и генератора 14 калиброванных импульсов. Первый синхроимпульс запускает генераторы 3 и 4 кадровой и строчной разверток, открывает электронный ключ, выполняет операцию «Сброс счетчиков счетного устройства 10, затем подается на делитель 13 частоты, через который запускает генератор 12 прямоугольных импульсов. Генератор 12 прямоугольных импульсов переводит электронный ко.ммутатор 6 в положение, коммутирующее на вход амплитудного селектора 7 телевизионную камеру 1. При этом начальная фаза импульса генератора 3 кадровой развертки смещает сканирующий луч на телекамерах 1 и 2, а прямоугольный импульс генератора 4 строчной развертки в горизонтальной плоскости.
Величина отклонения сканирующих лучей горизонтальной . плоскости определяется амплитудой прямоугольного импульса, а направление - его полярностью. По суммарным воздействиям двух отклоняющих импульсов сканирующие лучи телекамер займут одно из крайних положений одной из линии сканирования. Делитель 13 частоты делит частоту источника 5 кадровых синхроимпульсов на два и запускает генератор 12 прямоугольных импульсов. Разнополярные прямоугольные импульсы последнего поступают на управляющий вход электронного коммутатора бив зависимости от полярности коммутируют на вход амплитудного селектора 7 выходи с одной или другой телекамер. На вход амплитудного селектора 7 поочередно поступает информация о положении линии видимого горизонта с одной и другой телекамер.
Одновременно с этим через открытый электронный ключ 8 и электронный коммутатор 9 на соответствующий вход счетного устройства 10 начинают поступать импульсы от генератора 19 калиброванных импульсов. Поступление этих импульсов продолжается в течение всего времени перемещения сканирующего луча в вертикальной плоскости до пересечения с линией видимого горизонта. В момент пересечения на выходе амплитудного селектора 7 возникает импульс, который saKptataer электронный ключ 8 и прекращает счет. Число зарегистрированных импульсов пропорционально длительности видеосигнала от начала сканирования до точки пересечения с линией видимого горизонта.
После окончания периода кадровой развертки сканирующий луч возвращается в исходное положение. Второй кадровый синхроимпульс выполняет операцию «Сброс счетчика счетного устройства 10, переводя
5 код числа подсчитанных калиброванных импульсов в память электронно-вычислительного устройства 11. При смене полярности прямоугольного импульса с выхода генератора 10 прямоугольных импульсов электронный коммутатор 6 на вход амплитудного селектора 7 коммутирует телекамеру 2, и цикл работы устройства повторяется. При этом в электронно-вычислительное устройство 11 вводятся новые кадровые значения от второй телекамеры. На основе полученных данных длительности видеосигналов электронно-вычислительное устройство производит расчет углов крена, дифферента и вертикальной качки, а также определяет и исключает из величин крена и дифферента погрещности, вызванные наклонением видимого горизонта за счет вертикальной качки.
Предлагаемое техническое рещение позволяет обеспечить одновременное автоматическое определение непосредственно с борта судна в ходе эксперимента величины
углов бортовой (крена), килевой (дифферента) и вертикальной качки. Кроме того, оно повыщает точность измерения параметров бортовой и килевой качки судна исключением погрешностей за наклонение видимого горизонта, вызванного вертикальной качкой.
Формула изобретения
Установка для экспериментального определения параметров бортовой и килевой качки судна по линии видимого горизонта по авт. св. № 738939, отличающаяся тем.
что, с целью определения параметров вертикальной качки и исключения погрешностей, вызванных наклонением видимого горизонта, в нее введены дополнительная телевизионная камера, дополнительный электронный коммутатор, дополнительный генератор прямоугольных импульсов и делитель частоты, причем дополнительная телевизионная камера ориентирована в горизонтальной плоскости перпендикулярно основной телевизионной камере и соединена с выходами генераторов кадровой и строчной разверток и с первым коммутирующим входом дополнительного электронного коммутатора, при этом последний вторым коммутирующим входом соединен с основной телевизионной камерой, выходом - с амплитудным селектором, и третьим управляющим входом - с дополнительным генератором прямоугольных импульсов, причем генератор прямоугольных импульсов соединен своим входом с делителем частоты, который связан с источником кадровых синхронных импульсЪв.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 738939, кл. В 63 В 39/14, 28.04.79 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров бортовой и килевой качки судна по линии видимого горизонта | 1987 |
|
SU1461684A1 |
| Устройство для экспериментального определения параметров бортовой и килевой качки судна по линии видимого горизонта | 1987 |
|
SU1437294A2 |
| Установка для экспериментального определения параметров бортовой и килевой качки судна по линии видимого горизонта | 1978 |
|
SU738939A1 |
| Устройство автоматического измерения параметров качки судна по линии видимого горизонта | 1980 |
|
SU912588A1 |
| Телевизионный индикатор радиолокатора | 1985 |
|
SU1617662A2 |
| Телевизионный индикатор радиолокатора | 1983 |
|
SU1541786A1 |
| Телевизионный индикатор радиолокатора | 1985 |
|
SU1617663A2 |
| Телевизионный индикатор радиолокатора | 1985 |
|
SU1617664A2 |
| СПОСОБ ЮСТИРОВКИ НАПРАВЛЕНИЯ ВИЗИРНОЙ ОСИ ДВУХКАМЕРНОЙ ТЕЛЕВИЗИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2469493C1 |
| Способ обнаружения дефектов обработки и покрытий цилиндрических изделий | 1990 |
|
SU1807311A1 |
