(54) МЕХАНИЗМ УДЕРЖАНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубодержатель | 1977 |
|
SU657167A1 |
| Механизм удержания буровой колон-Ны | 1978 |
|
SU848576A2 |
| Устройство для удержания бурильной колонны | 1987 |
|
SU1620593A1 |
| Механизм удержания буровой колонны | 1981 |
|
SU976014A2 |
| Устройство для удержания бурильной колонны | 1980 |
|
SU941538A1 |
| Механизм удержания бурильной колонны | 1983 |
|
SU1121379A1 |
| Элеватор для спуска и подъема бурильных труб | 1981 |
|
SU1016477A2 |
| Механизм удержания бурильнойКОлОННы | 1979 |
|
SU848577A1 |
| Механизм удержания буровой колонны | 1972 |
|
SU505790A1 |
| Механизм свинчивания бурильных труб | 1985 |
|
SU1416659A1 |
Изобретение относится к технике /бурения и предназначено для использования, в комплексно автоматизированных буровых установках для удержания бурильного инструмента на устьё скважины при производстве спускоподъемных операций.
Известен механизм для удержания бурильного инструмента, выполненный в виде корпуса, в котором расположены кольцо-обойма с плашками для удержания бурильного инструмента, кбльца с клиновыми ползунами для заклинивания плашек между наклонной поверхностью ползунов и буровглм инструментом, заклинивающие и расклинивающие гидроцилиндры для сведения и разведения ползунов.
Внутри корпуса на кольце-обойме и зажимном кольце установлены датчики положения, контролирующие исходное положение зажимного кольца перед захватом и его крайнее нижнее положение, датчик исходного верхнего положения кольца-обоймы и гидросистема управления с контролирующим датчиком-реле давления.
В указанной конструкции предлагаемого механизма захват колонны бурильного инструмента производится
при подаче давления в гидроцилиндры заклинки. Повышение давления фиксируется контролирующим датчиком-реле давления, сигнал которого является контролем захвата бурильного инструмента 1 .
Однако возможно положение механизма, в котором ход зажимного кольца использован полностью, давление в гидроцилиндрах заклинки повышается, и датчик-реле формирует сигнал, но захват инструмента может не состояться, и возникает аварийная ситуация. Следовательно, недостатком этого механизма является отсутствие информации о том, что ход зажимно.го кольца полностью использован.
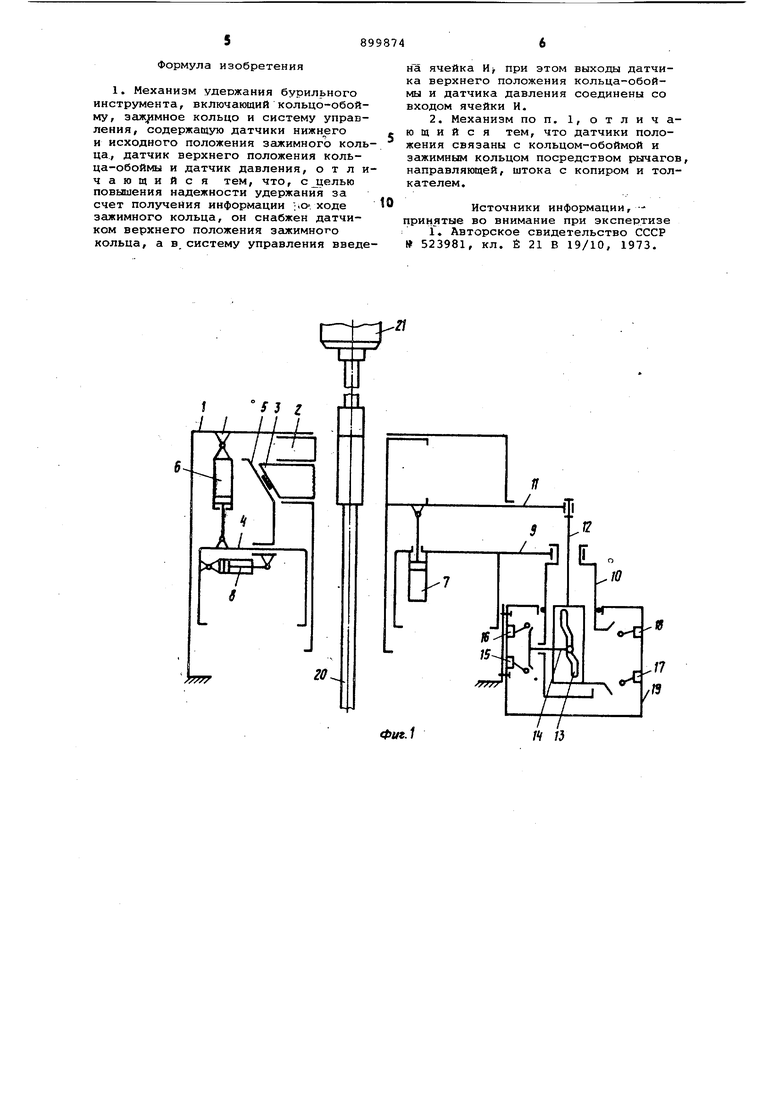
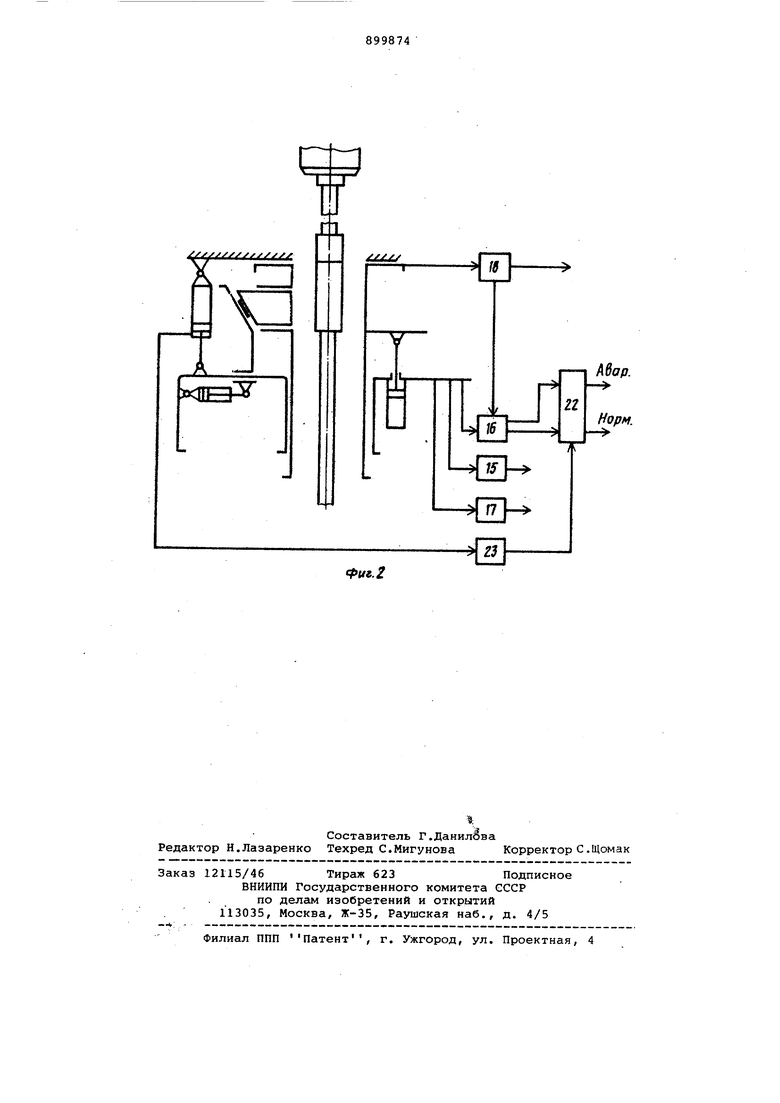
Кроме того, в предлагаемом механизме датчики размещены в рабочей зоне, что создает тяжелые условия для их работы, так как они не защищены от воздействия динамических нагрузок и загрязнения буровым раствором, содержащим агрессивные примеси, при этом рассредоточие датчиков по рабочим огранам механизма в труднодоступных местах затрудняет настройку и обслуживание, не гарантирует безопасность обслуживаемого персонала. Это снижает надежность деистВИЯ и безопасность эксплуатации -механизма удержания бурильного инструмента. Цель изобретения - повышение надежности удержания бурильного инстру мента за счет получения информации о ходе зажимного кольца. Указанная цель достигается тем, что в механизм удержания бурильного инструмента, включающий кольцо-обой му, зажимное кольцо и систему управ ления, содержащую датчики нижнего и исходного положения зажимного кол ца, датчик верхнего положения кольц обоймы и датчик давления, снабжен датчиком верхнего положения за:кимно го кольца, а в систему управления введена ячейка И, при этом выходы датчика верхнего положения кольцаобоймы и датчика давления соединены со входом ячейки И. Кроме того, датчики положения св заны с кольцом-обоймой и зажимным кольцом посредством рычагов, направляющей, штока с копиром и толкателем На фиг, 1 изображена схема предлагаемого механизма удержания буриль ного инструмента; на фиг. 2 - блоксхема основной части системы управления. Механизм состоит из корпуса 1, внутри которого помещены кольцообойма 2 с плашками 3 и зажимное кольцо 4 с ползунами 5. Между корпусом 1 и зажимным кольцом 4 расположены гидроцилиндры 6 зажима. Между зажимным кольцом 4 и кольцом-обоймой 2 установлены цилиндры 7 разжима. Внутри зажимного кольца 4 расположены гидроцилиндры 8 перемещения ползунов 5. Зажимное кольцо 4 связано рычагом 9 с направляющей 10. Кольцо-обойма 2 соединена рычагом 11 со штоком 12, связанным с копиром 13, действующим на толкатель 14. Механизм включает датчик 15 исходного положения зажимного кольца 4 датчик 16 верхнего положения зажигЛю го кольца 4, датчик 17 нижнего положения кольца 4 и датчик 18 исходного положения кольца-обоймы 2. Датчики 15, 16, 17 и 18, направляющая 10, шток 12, копир 13 и толкатель 14 скомпонованы в единый блок, который вынесен на корпус 1 механизма и защи щен герметичньа кожухом 19. еханизм предназначен для удержанияЛбурильного инструмента 20, передаваемого в механизм грузозахватньм устройством 21. В блок-схему введена ячейка К 22, вход которой электрически связан с выходами контролируемого датчика-рел давления 23 и датчика 16. . Предлагаемый механизм работает сл дукнцим образом. в исходном для осуществления захваа положении кольцо-обойма 2 с плашами 3 упирается в корпус 1, сигнал б этом посредством рычага 11, штока . 12 и копира 13 выдается датчиком 18, зажимное кольцо приподнято,сигнал б этом положении посредством рычага , направляющей 10 и толкателя 14 пеедается датчиком 15. При захвате бурильного инструмента 20 подается рабочая жидкость в « штоковую полость гидроцилиндра б заклинки, и зажимное кольцо 4 начинает подниматься вверх для заклинивания. Ползуны 5 двигаются вместе с зажиМным кольцом 4 по наклонным плоскостям плашек 3, которые прижимаются к .буровому инструменту 20. Давление в гидроцилиндре 6 заклинки резко возрастает. Повышение давления фиксируется контролирующим датчикомреле давления 23. В случае отсутствия сигнала от датчика 16 верхнего положения зажимного кольца 4, указывающего на то, что ход .для заклинивания полностью не использован, ячейка И системы управления механизма, связанная электрически с датчиком 16 и датчиком-реле давления 23, формирует О сигнал в систему автоматизации о нормальном ходе операции. При .наличии сигнала от датчика ±6, указывающего на то, что зажимное кольцо 4 находится в крайнем верхнем положении, т. е. ход для заклинивания полностью использован, следовательно, захват не может произойти, ячейка И системы управления формирует сигнал об аварийной ситуации, в этом положении зажимное кольцо 4 посредством рычага 9, направляющей 10 и толкателя 14 воздействует на датчик 16 (фиг. 1). Воздействие на датчик 17, дающий сигнал в случае, когда зажимное кольцо 4 находится в { райрем нижнем положении,осуществляется посредством рычага 9 и направляющей 10. Такое конструктивное решение позволяет повысить надежность захвата, связать рабочие органы механизма с датчиками положения, расположенными вне зоны действия ударов и вибрации, возникающих при работе механизма, позволяет также защитить датчики кожухом от загрязнения буровым раст- , вором, сосредоточив их в месте, удобг ном и безопасном для монтажа, регулирования и контроля основных эксплуатационно-технических характеристик датчиков в процессе эксплуатации . Такая конструкция механизма удержания бурильного инструмента значительно пов ышает долговечность и надежность действия датчиков положения рабочих dpraHOB механизма, качество и надежност удержания бурильного инструмента.
Формула изобретения
Источники информации, принятые во внимание при экспертизе Г. Авторское свидетельство СССР 523981, кл. Ё 21 В 19/10, 1973.
X
a
f(bap.
Норм.
Риг. 2
