1
Изобретение относится к электроэнергетике, а именно к противоаварийной автоматике энергосистем, и может быть использовано для электрического торможения синхронных генераторов на электростанциях с целью повьппения их устойчивости.
Известен ряд способов электрического торможения синхронных генераторов и устройств для их осуществления, согласно которым подключение тормозных резисторов осуществляется на время, определяемое величиной сброса электрической мощности генератора, или величиной и знаком приращения угла или его производной 1
Однако для эффективного управления переходным процессом интенсивность тормозного воздействия (величина тормозного сопротивления и время его включения) должна определяться не только тяжестью аварии, но и предаварийной мощностью генератора.
Наиболее близким по технической сущности к предлагаемому является способ, согласно которому к генератору с началом паузы автоматического повторного включения подключают тормозные резисторы, мощность которых определяют is зависимости от предаварийной мощности генератра и тяжести аварии, а при достижении скольжением генератора определенного отриг
10 цательного значения, установленного заранее (экспериментально или на основе расчетов) резисторы отключа - ют f4}.
15
Недостатком известного способа является невысокое качество переходного процесса,вследствие того, что в момент отключения резисторов не обеспечивается равенство нулю кинеКтической энергии генератора. Это может привести к сильным качаниям синхронного генератора или его пере- торможению.
Наиболее близким к предлагаемому по технической сущности является устройство управление демпфирующим резистором, содержащее датчик активной мощности генератора, блок фиксации предаваринной мощности генератора, блок определения величины сброса электрической мощности генератора при аварии, блок измерения скольжения, блоки сравнения замеряемых величин с заданными уставками и блок управления выключателем тормозного резистора, причем выход датчика активной мощности подключен к первому входу блока определения сброса электрической мощности и ко входу блока фиксации предаварийной мощности генератора, выход которого подключен ко второму входу блока определения сброса электрической мощности. Выходы блока фиксации предаварийной мощмости генератора, блока опеределения величины сброса электрической мощности и блока Измерения скольжения подключены к выходам блоков срав- 25
нения замеряемых величин с заданными уставками, выходы которых подключены к блоку управления выключателем тормозного резистора З.
Недостатком известного устройства является невысокое качество переходного процесса вследствие того, что мощность включаемого тормозг ного резистора не зависит от мощност генератора в аварийном режиме и тяжести аварии, а отключение резис-. тора производится полностью. При .этом в момент отключения тормозных резисторов не обеспечивается равенство нулю кинетической энергии синхронного генератора, что может привести к сильным качаниям или переторможению синхронного генератора.
Цель изобретения - повьппение ка-+ чества управления переходными процессами за счет уменьшения качаний синхронного генератора при отключении тормозных резисторов.
Поставленная цеЛь достигается тем, что согласно способу электрического торможения путем подключе- ния к генератору с началом паузы автоматического повторного включения тормозных резисторов, мощность которых определяют в зависимости от предаварийной мощности генератора и тяжести аварии, при достижении скольжением отрицательного значения отключают часть тормозных резисторов, мощность которых выбрана в пределах 30-80% мощности подключенных резисторов , а оставшуюся часть резисторов отключают одновременно о окончанием паузы автоматического повторного включения.
Кроме того, устройство для осуществления предлагаемого способа, содержащее блок управления выключателями тормозных резисторов, блок . измерения скольжения, датчик активной мощности генератора, блок определения величины сброса электрической мощности генератора, блок фиксации преданарийной мощности генератора, блоки определения мощности включаемых и отключаемых тормозных резисторов и управляемое реле времени, причем.датчик активной мощности генератора подключен ко входам блока определения величины сброса электрической мощности генератора и блока фиксации предаварийной мощности, выход которого подключен ко
сброса электрической мощности генераторов, снабжено блоком определения мощности включаемых и отключаемы тормозных резисторов и управляемым реле времени, причем ко входу блока определения мощности отключаемых тормозных резисторов подключены выходы блока определения мощности включаемых резисторов и управляемого реле времени, ко входам которого подключены выходы блока измерения скольжения и блока определения мощности отключаемых резисторов,а выходы управляемого реле времени и блоков оперделения мощности включаемых и отключаемых тормозных резисторов подключены к блоку управления выключателями тормозных резисторов,
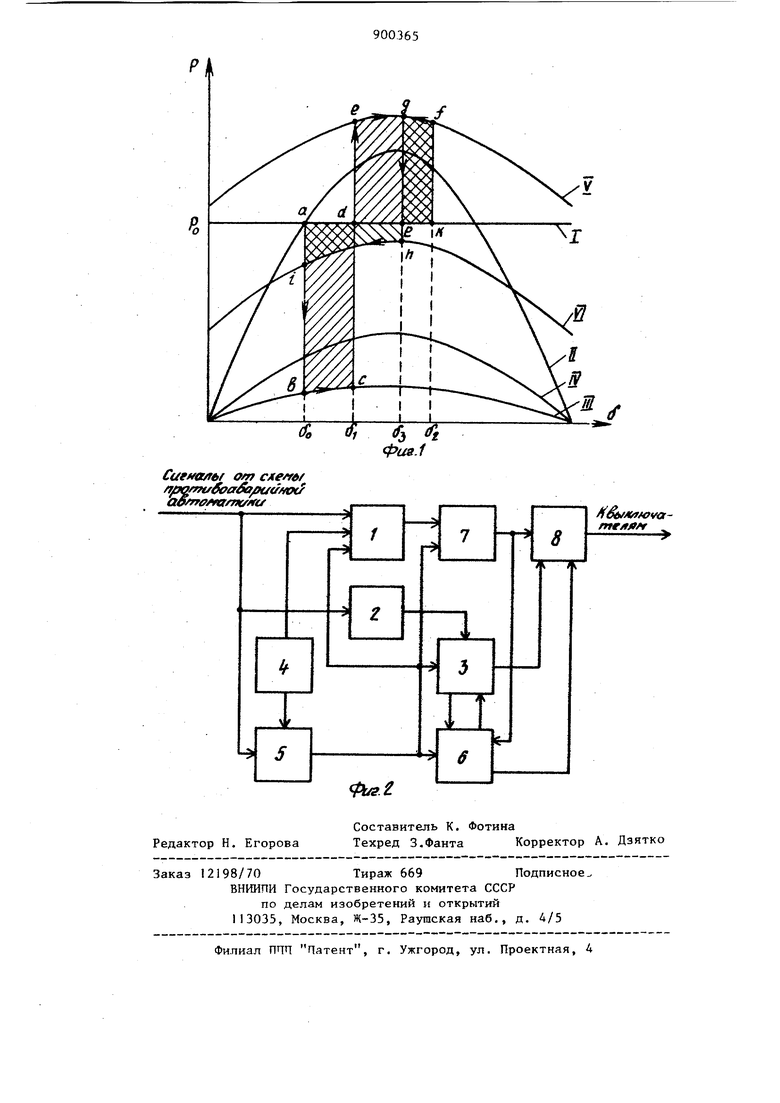
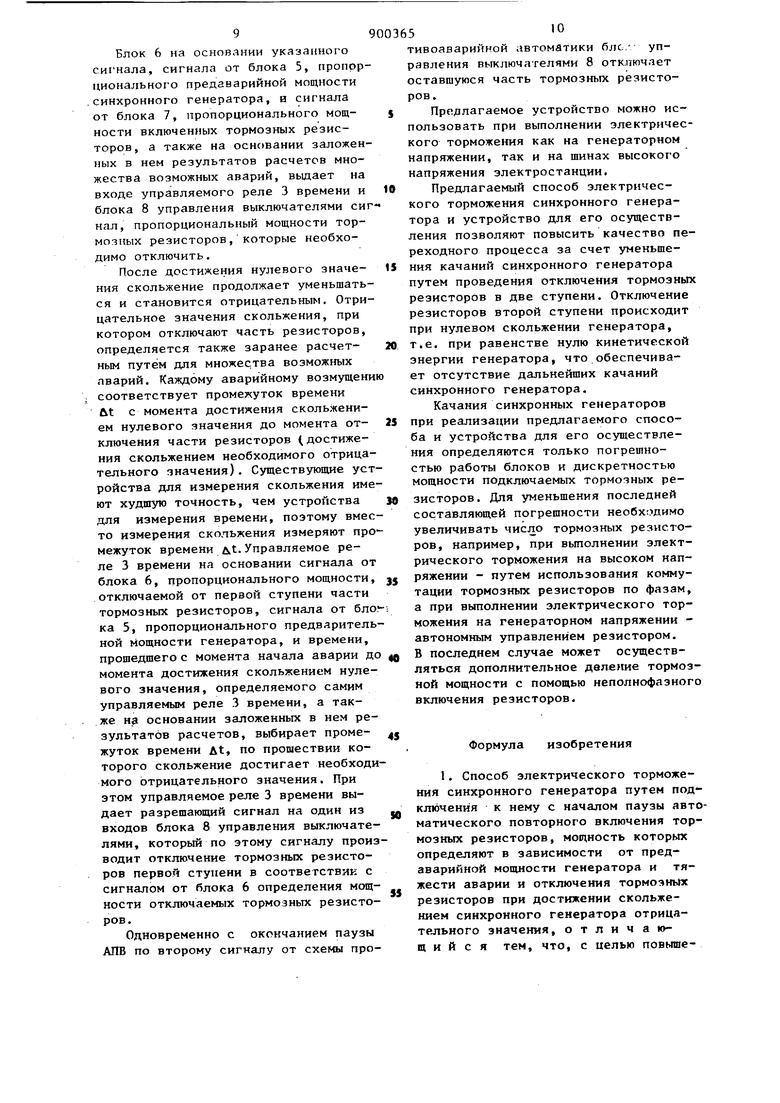
На фиг. 1 изображены угловые характеристики активной мощности синхронного генератора на отдельных эта- пах динамического перехода; на фиг. 2 - блок-схема устройства для элект- рического торможения синхронного генератора.
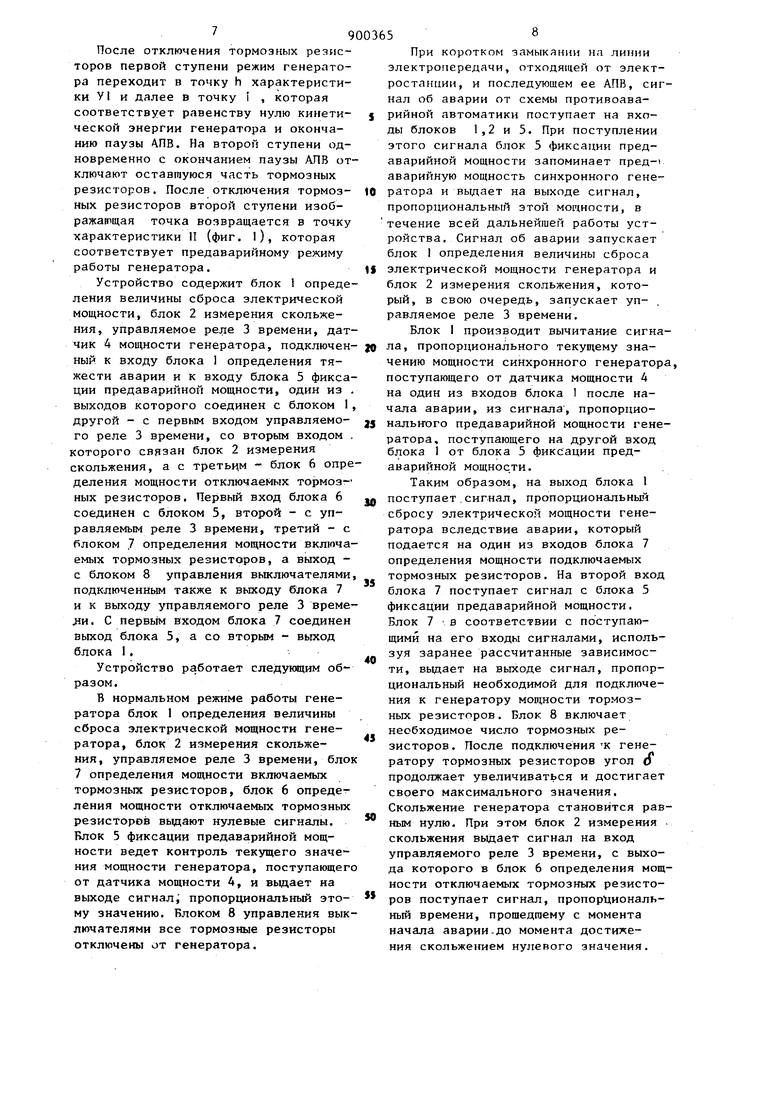
Характеристика I на фиг. 1 соответствует мощности первичного двигаг теля, угловая характеристика II мощности генератора в предаварийном режиме, угловая характеристика мощности генератора в режиме короткого замыкания, угловая характеристика 1У - мощности генератора во время яаузы АПВ без торможения, угловая входам блока определения величины 5 характеристика Y - мощности Ienepaтора при включении тормозных резисторов с началом паузы ЛЛВ, угловая характеристика YI - мощности генератора после отключения тормозных резисторов первой ступени, Р и сГ со ответствуют текущим значениям мощно ти и угла генератора, а Рр и (Го значениям мощности и угла генератора в доаварийном режиме . Предлагаемый способ электрическо го торможения состоит в следующем. Доаварийному режиму генератора с ответствует точка а характеристики И. В начальный момент короткого замыкания мощность генератора умень шается до величины, соответствующей точке в характеристики Ш. Разность между мощностями генератора в точке а характеристики Пив точке в характеристики 111 соответствует сбросу мощности генератора при аварии. Под действием появивщегося небаланса мощностей угол (f между вектором ЭДС синхронного генератора и век тором напряжения приемной системы увеличивается от (Гр до ( . Одновременно с отключением поврежденной линии, т.е. с началом паузы АПВ, к генератору подключают тормоз ные резисторы. Мощность тормозных резисторов, необходимую для подключения к генератору в каждом конкрет ном случае,рассчитывают заранее для различных сочетаний предаварийной мощности генератора и возможных слу чаев коротких замыканий, характеризующихся различными значениями сбро са мощности, по следующей формуле: , Р К X рез зсип мощность -тормозных резисторов, необходимая для подклю чения к генератору; предаварийная мощность гене ратора; сброс мощности генератора при аварии; К - коэффициент запаса, равньй 0,1. В зависимости от предаварийной мощности генератора и сброса мощнос ти генератора при аварии подключают необходимое число тормозных резисторов. Мощность синхронного генератора в момент включения резисторов прини мает значение, соответствушцее точке е характеристики V. Генератор 3 затормаживается, но угол сГ под влиянием кинетической энергии, накопленной в режиме короткого замыкания, увеличивается от гГ до (t, что соответствует переходу из точки е в точку f по характеристике у. В точке f угол О достигает своего максимальнрго значения, а скольжение S, равное первой производной от угла сР , принимает нулевое значение. Положение точки f определяется равенством площадок ускорения adcba и торможения efkde, при котором кинетическая энергия генератора, накопленная в режиме короткого«замыкания, становится равной нулю. Далее угол О уменьщается от сГ до cTj что соответствует переходу из точки f в точку g по характеристике У. При этом скольжение уменьшается до некоторого отрицательного значения. В этот момент, соответствующий точке g, отключают первую ступень тормозных резисторов. Мощность тормозных резисторов, отключаемых на первой ступени, и отрицательное значение скольжения S, при котором отключают резисторы первой ступени, определяют расчетным путем заранее для конкретного генератора, линии и множества возможных аварий из условия отключения тормозных резисторов второй ступени одновременно с окончанием паузы ARB и из условия равенства нулю кинетической энергии генератора к концу торможения, т.е. равенства площадок ускорения аIhla и торможения gfklg. В случае тяжелой аварии, например, трехфазного короткого замыкания на шинах электростанции при максимальной нагрузке генератора в предаварийном режиме, на первой ступени отключают минимальную мощность тормозных резисторов (как показали расчеты, равную порядка 30% мощности резисторов, подключенньй к генератору с началом паузы АПВ). В случае легкой аварии, например, однофазного короткого замыкания в двухцепной линии, при минимальной нагрузке генератора в предаварийном режиме, на первой ступени отключают максимальную мощность тормозных резисторов порядка 80% мощности . При авариях средней тяжести на первой ступени отключают 30-80% мощности включенных тормозных резисторов. 79 После отключения тормозных резисторов первой ступени режим генератора переходит в точку h характеристики У I и далее в точку i , которая соответствует равенству нулю кинетической энергии генератора и окончанию паузы АПВ. На второй ступени одновременно с окончанием паузы АЛВ от ключают оставшуюся часть тормозных резисторов. После отключения тормозных резисторов второй ступени изображающая точка возвращается в точку характеристики И (фиг. 1), которая соответствует предаварийному режиму работы генератора. Устройство содержит блок } опреде ления величины сброса электрической мощности, блок 2 измерения скольжения, управляемое реле 3 времени, дат чик 4 мощности генератора, подключен
ный к входу блока 1 определения тяжести аварии и к входу блока 5 фиксации предаварийной мощности, один из . выходов которого соединен с блоком I, другой - с первым входом управляемого реле 3 времени, со вторым входом . которого связан блок 2 измерения скольжения, а с третьим - блок 6 определения мощности отключаемых тормозных резисторов. Первый вход блока 6 соединен с блоком 5, второй - с управляемым реле 3 времени, третий - с блоком .7 определения мощности включаемых тормозных резисторов, а выход с блоком 8 управления выключателями, подключенным также к выходу блока 7 и к выходу управляемого реле 3 времели. С первьгм входом блока 7 соединен выход блока 5, а со вторым - выход блока 1.
Устройство работает следунщим образом.
В нормальном режиме работы генератора блок 1 определения величины сброса электрической мощности генератора, блок 2 измерения скольжения, управляемое реле 3 времени, блок 7 определения мощности включаемых тормозных резисторов, блок 6 определения мощности отключаемых тормозных резисторов вьодают нулевые сигналы. Блок 5 фиксации предаварийной мощности ведет контроль текущего значения мощности генератора, поступающего от датчика мощности 4, и вьщает на выходе сигналj пропорциональный этому значению. Блоком 8 управления выключателями все тормозные резисторы отключены от генератора.
чению мощности синхронного генератор поступающего от датчика мощности 4 на один из входов блока 1 после начала аварии, из сигнала , пропорционального предаварийной мощности генератора, поступающего на другой вход блока 1 от блока 5 фиксации предаварийной мощности.
Таким образом, на выход блока I поступает.сигнал, пропорциональньй сбросу электрической мощности генератора вследствие аварии, который подается на один из входов блока 7 определения мощности подключаемых тормозных резисторов. На второй вход блока 7 поступает сигнал с блока 5 фиксации предаварийной мощности. Блок 7 в соответствии с поступающими на его входы сигналами, используя заранее рассчитанные зависимости, выдает на выходе сигнал, пропорциональный необходимой для подключения к генератору мощности тормозных резисторов. Блок. 8 включает необходимое число тормозных резисторов. После подключения к генератору тормозных резисторов угол о продолжает увеличиваться и достигает своего максимального значения. Скольжение генератора становится равным нулю. При этом блок 2 измерения скольжения выдает сигнал на вход управляемого реле 3 времени, с выхода которого в блок 6 определения мощности отключаемых тормозных резисторов поступает сигнал, пропор1 иональный времени, прошедгаему с момента начала аварии-до момента достижения скольжением нулевого значения. 5 При коротком замыкании на линии электропередачи, отходящей от электростанции, и последующем ее АПВ, сигнал об аварии от схемы противоаварийной автоматики поступает на входы блоков 1,2 и 5. При поступлении этого сигнала блок 5 фиксации предаварийной мощности запоминает пред-i аварийную мощность синхронного генератора и выдает на выходе сигнал, пропорциональный этой мощности, в течение всей дальнейшей работы устройства. Сигнал об аварии запускает блок 1 определения величины сброса электрической мощности генератора и блок 2 измерения скольжения, который, в свою очередь, запускает управляемое реле 3 времени. Блок 1 производит вычитание сигнала, пропорционального текущему знаБлок 6 на основании указанного сигнала, сигнала от блока 5, пропорционального предаварийной мощности .синхронного генератора, и сигнала от блока 7, пропорционального мощности включенных тормозных резисторов, а также на основании заложенных в нем результатов расчетов множества возможных аварий, выдает на входе управляемого реле 3 времени и блока 8 управления выключателями сиг нал, пропорциональный мощности тормозпых резисторов,которые необходимо отключить. После достижения нулевого значения скольжение продолжает уменьшаться и становится отрицательным. Отрицательное значения скольжения, при котором отключают часть резисторов, определяется также заранее расчетным путём для множества возможных аварий. Каждому аварийному возмущени соответствует промежуток времени &t с момента достижения скольжением нулевого значения до момента отключения части резисторов (достижения скольжением необходимого отрицательного значения). Существующие уст ройства для измерения скольжения име ют худшую точность, чем устройства для измерения времени, поэтому вмес то измерения скольжения измеряют про межуток времени u,t. Управляемое реле 3 времени на основании сигнала от блока 6, пропорционального мощности, отключаемой от первой ступени части тормозных резисторов, сигнала от бло ка 5, пропорционального предваритель ной мощности генератора, и времени, прошедшего с момента начала аварии до момента достижения скольжением нулевого значения, определяемого самим управляемым реле 3 времени, а также на основании заложенных в нем результатов расчетов, выбирает промежуток времени At, по прошествии которого скольжение достигает необходи мого отрицательного значения. При этом управляемое реле 3 времени выдает разрешающий сигнал на один из входов блока 8 управления выключателями, который по этому сигналу произ водит отключение тормозных резисторов первой ступени в соответствии с сигналом от блока 6 определения мощности отключаемых тормозных резисторов. Одновременно с окончанием паузы АПВ по второму сигналу от схемы про5Отивоаварийной автоматики блс,- управления выключателями 8 отключает оставшуюся часть тормозных резисторов. Предлагаемое устройство можно использовать при выполнении электрического торможения как на генераторном напряжении, так и на шинах высокого напряжения электростанции. Предлагаемый способ электрического торможения синхронного генератора и устройство для его осуществления позволяют повысить качество переходного процесса за счет уменьшения качаний синхронного генератора путем проведения отключения тормозных резисторов в две ступени. Отключение резисторов второй ступени происходит при нулевом скольжении генератора, т.е. при равенстве нулю кинетической энергии генератора, что обеспечивает отсутствие дальнейших качаний синхронного генератора. Качания синхронных генераторов при реализации предлагаемого способа и устройства для его осуществления определяются только погрешностью работы блоков и дискретностью мощности подключаемых тормозных резисторов. Для уменьшения последней составляющей погрешности необходимо увеличивать число тормозных резисторов, например, при вьтолнении электрического торможения на высоком напряжении - путем использования коммутации тормозных резисторов по фазам, а при выполнении электрического торможеиия на генераторном напряжении автономным управлением резистором. В последнем случае может осуществляться дополнительное деление тормозной мощности с помощью неполнофазного включения резисторов. Формула изобретения 1. Способ электрического торможения синхронного генератора путем подключения к нему с начапом паузы автоматического повторного включения тормозных резисторов, мощность которых определяют в зависимости от предаварийной мощности генератора и тяжести аварии и отключения тормозных резисторов при достижении скольжением синхронного генератора отрицательного значения, отличающийся тем, что, с целью повышения качества переходного процесса, при достижении скольжением отрицательного значения отключают часть т мозных резисторов, мощность которых выбрана в пределах 30-80% мощности подключенных резисторов, а оставшуюся часть, резисторов отключают одновременно с окончанием паузы автомати ческого повторного включения. 2. Устройство для электрического торможения синхронного генератора с использованием тормозных резисторов, содержащее блок измерения скол жения, блок управления выключателями тормозных резисторов, блок опред ления величины сброса злек рической мощности генератора, блок фиксации предаварийной мощности генератора, выход которого подключен ко входу блока определения величины сброса электрической мощности генератора, и датчик активной мощности генератора, выход которого подключен ко входам блока фиксации предаварийной мощ ности генератора и блока определения величины сброса электрической MODIности генератора, отличающе с я тем, что, с целью повьшени я качества управления переходным процессом, оно снабжено блоком определения мощности включаемых тормозных резисторов, блоком определения мощности отключаемых тормозных резисторов и управляемым реле времени, причем выход блока определения величины сброса электрической мощности генератора подключен к первому входу бло ка определения мощности включаемых тормозных резисторов, выход блока : фиксации предаварийной мощности гене 5раторл подключен ко второму блока определения мощности вклн)чаемых тормозных регисторов и к первым входам управляемого реле времени и блока определения мощности отключаемых тормозных резисторов, ко второму входу которого подключен выход блока определения мощности включаемых тормозных резисторов, а к третьему входу подключен выход управляемого реле времени, ко второму и третьему входам которого подключены блок измерения скольжения и выход блока определения мощности отключаемых тормозных резисторов, причем выход управляемого реле времени подключен к первому входу блока управления выключателями, ко второму и третьему входам .которого подключены выходы блока определения мощности включаемых тормозных резисторов и блока определения мощности отключаемых тормозных резисторов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 120584, кл. Н 02 J 3/24, 1959. 2.Авторское свидетельство СССР № 611283, кл. Н 02 Р 9/10, 1976, 3.Заявка Японии № 53-32859, кл. Н 02 J 3/24, 1978. 4.Кощеев Л. А. Управление электрическим торможением генераторов в , схеме с применением БАПВ. Устойчивость и надежность энергосистем СССР. Под ред. Ф. И. Сингучева. М., Энергия, 1964. 5.Яаявка Японии № 54-5488, кл. Н 02 J 3/24, 1979.
Catffo/rbf от frft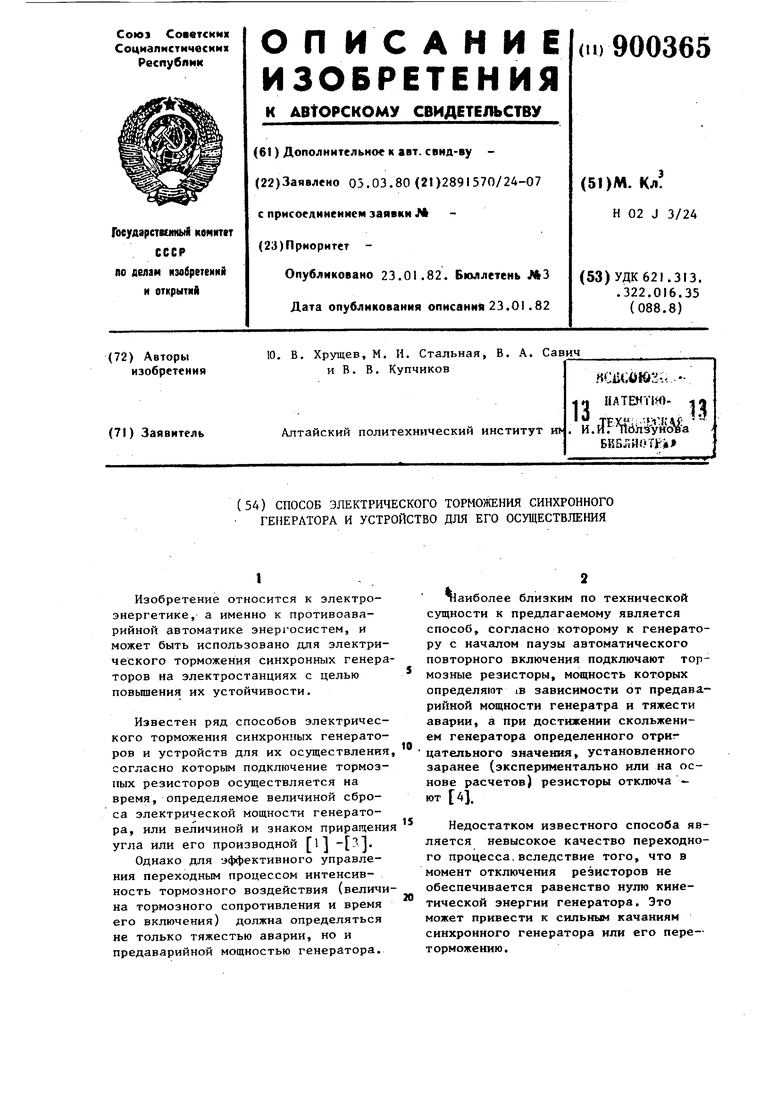
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления тормозными резисторами генератора | 1983 |
|
SU1094104A1 |
| Способ электрического торможения синхронного генератора | 2018 |
|
RU2676754C1 |
| Способ автоматического повторного включения линии электропередачи и устройство для его реализации | 1981 |
|
SU978256A1 |
| Способ однофазного автоматического повторного включения линии электропередачи | 1989 |
|
SU1683113A1 |
| Устройство для управления торможением синхронного генератора | 1980 |
|
SU921023A1 |
| Устройство для защиты с телеотключением линий электропередач | 1981 |
|
SU991543A1 |
| Способ электрического торможения синхронных генераторов | 2022 |
|
RU2799501C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СИНХРОННОЙ НАГРУЗКИ | 1992 |
|
RU2076421C1 |
| Способ повышения динамическойустойчивости электрических систем | 1973 |
|
SU508856A1 |
| Устройство защиты электрической машины с выключателем и автоматом повторного включения | 1989 |
|
SU1700674A1 |