(54) ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ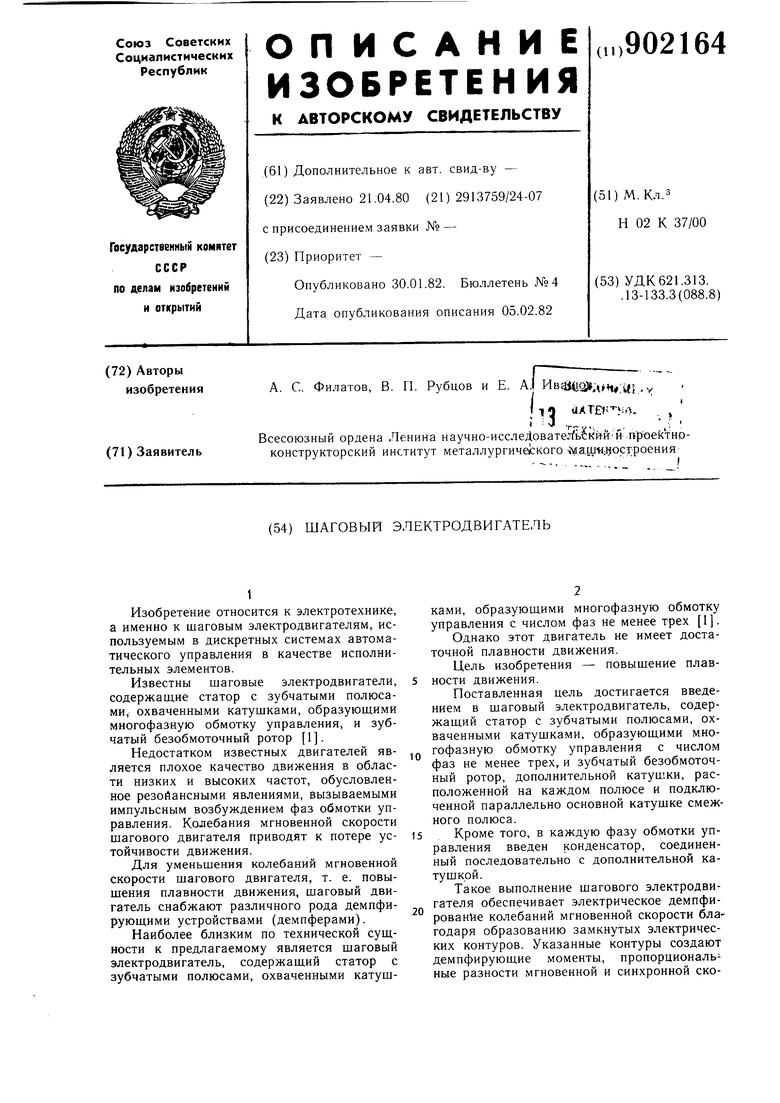

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| Вентильный электродвигатель | 1988 |
|
SU1569934A1 |
| МОТОР-КОМПРЕССОР | 2001 |
|
RU2213257C2 |
| Синхронный редукторный электродвигатель | 1990 |
|
SU1723640A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Синхронный редукторный электродвигатель | 1989 |
|
SU1713077A1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2017 |
|
RU2658636C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОПЕРЕЧНЫМ МАГНИТНЫМ ПОТОКОМ (ВАРИАНТЫ) | 2018 |
|
RU2690666C1 |
1
Изобретение относится к электротехнике, а именно к шаговым электродвигателям, используемым в дискретных системах автоматического управления в качестве исполнительных элементов.
Известны шаговые электродвигатели, содержашие статор с зубчатыми полюсами, охваченными катушками, образуюшими многофазную обмотку управления, и зубчатый безобмоточный ротор 1.
Недостатком известных двигателей является плохое качество движения в области низких и высоких частот, обусловленное резойансными явлениями, вызываемыми импульсным возбуждением фаз обмотки управления. Колебания мгновенной скорости шагового двигателя приводят к потере устойчивости движения.
Для уменьшения колебаний мгновенной скорости шагового двигателя, т. е. повышения плавности движения, шаговый двигатель снабжают различного рода демпфируюшими устройствами (демпферами).
Наиболее близким по технической сущности к предлагаемому является шаговый электродвигатель, содержаш,ий статор с зубчатыми полюсами, охваченными катушками, образующими многофазную обмотку управления с числом фаз не менее трех 1.
Однако этот двигатель не имеет достаточной плавности движения.
Цель изобретения - повышение плав5 ности движения.
Поставленная цель достигается введением в шаговый электродвигатель, содержаший статор с зубчатыми полюсами, охваченными катушками, образуюшими многофазную обмотку управления с числом фаз не менее трех, и зубчатый безобмоточный ротор, дополнительной катушки, расположенной на каждом полюсе и подключенной параллельно основной катушке смежного полюса.
Кроме того, в каждую фазу обмотки уп15равления введен конденсатор, соединенный последовательно с дополнительной катушкой.
Такое выполнение шагового электродвигателя обеспечивает электрическое демпфи20рование колебаний мгновенной скорости благодаря образованию замкнутых электрических контуров. Указанные контуры создают демпфирующие моменты, пропорциональные разности мгновенной и синхронной скоростей, т. е. не приводят к дополнительному нагружению двигателя, что способствует сохранению его нагрузочной способности во всем диапазоне частот.
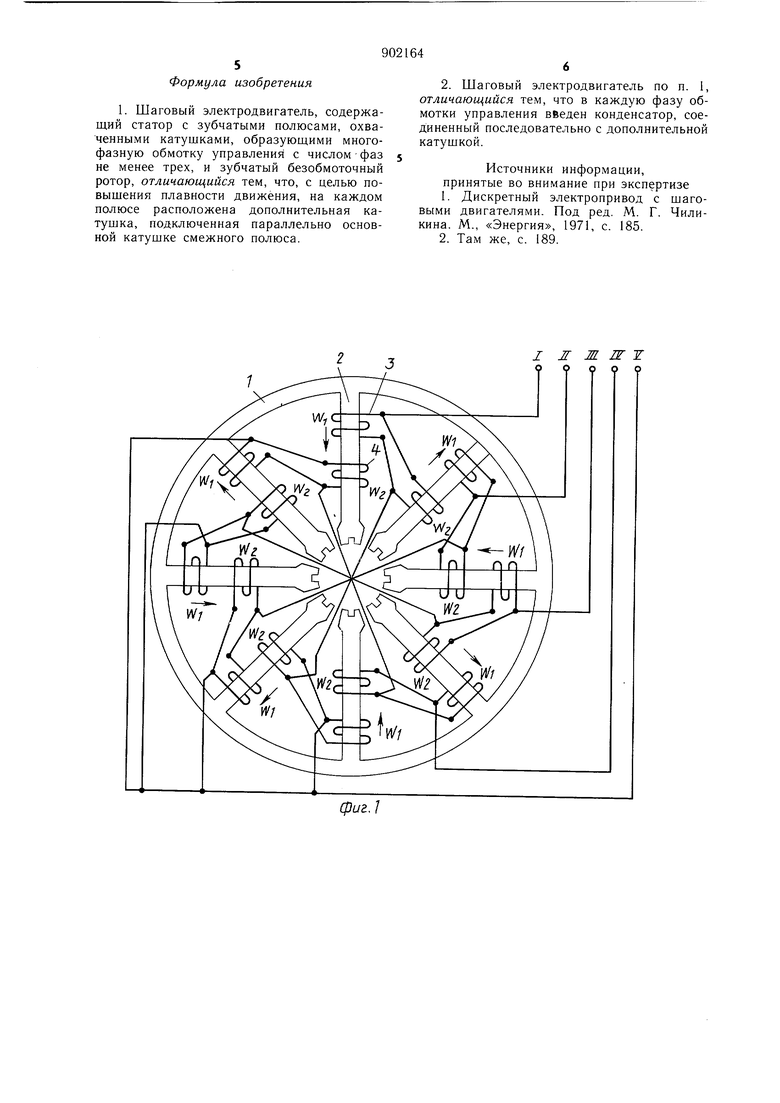
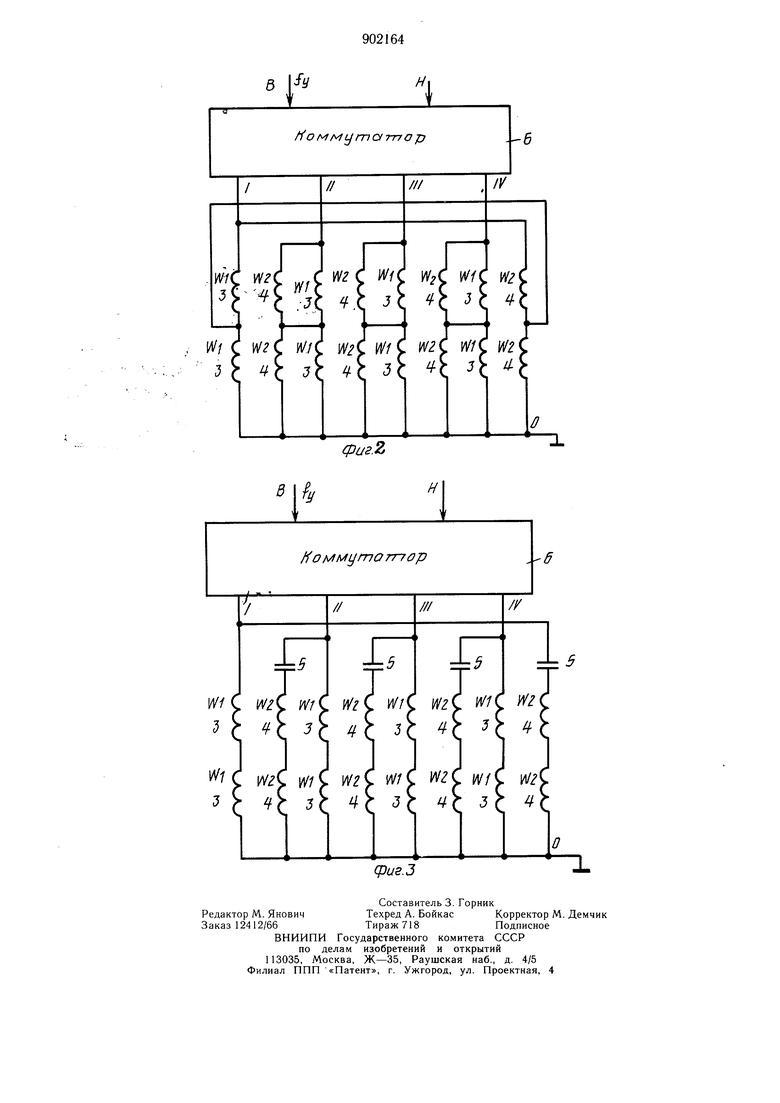
На фиг. приведена схе.ма раз.мещепия катушек обмотки управления на полюсах статора применительно к четырехфазно.му индукторному двигателю; на фиг. 2 - вариант схемы соединений с непосредственным подключение.м дополнительных катушек; на фиг. 3 - то же, с подключением дополнительных катушек через конденсаторы.
На магнитопроводе 1 статора двигателя (фиг. 1) расположены полюсы 2, охваченные двумя катушками - основными 3 (Wi) и дополнительными 4 (W) (ротор двигателя не показан). Основная и дополнительная катушка каждой пары смежных полюсов соединены параллельно непосредственно (фиг. 2) или через конденсатор 5 (фиг. 3). Катушки противоположных полюсов, соединенные между собой последовательно (фиг. 1, 2 и 3) или параллельно, что несушественно для достижения поставленной целн, образуют фазу. На фиг. 1, 2 и 3 приведена схема об.мотки применительно к четырехфазному двигателю, фазы которого, образованные последовательным соединением катушек противоположно расположенных полюсов, обозначены соответственно I, И, III, IV и подключены к выходу коммутатора 6.
Двигатель работает следуюшим обра30 .М.
Поочередное подключение фаз коммутатора к ИСТОЧ1ШКУ питания (не показан) в последовательности I-II - 1П - IV-1 и т. д. обеспечивает с.мешение поля статора на шаг при каждом такте ком.мутации и, соответственно, поворот ротора на шаг в условном направлении Вперед. Такая очередность ком.мутации фаз обеспечивается при подаче имнульсов управления 1 на вход В коммутатора 6. Обратное чередование ко.ммутации фаз I - IV-III - II - I и т. д. обеспечивается подачей импульсов управления на вход Я коммутатора 6, что соответствует врап1ению ротора двигателя в условном направ.лепии Назад.
Наиболее распространенной для четырехфазного шагового двигателя является парная ко.ммутация, соответствуюшая двум одновременно включенным фазам. Предлагаемый двигатель допускает любой вид ко.ммутации фаз, что определяется только типом коммутатора 6. При парной коммутации условному направлению врашения Вперед соответствует чередование фаз: 1,11 - И,HI - И 1,,,Н и т. д., а направлению врашения Назад - Н,1-MV---ПМП-И1, fl -Н,1 и т. д.
Улучшение демпфируюших свойств в предлагаемом двигателе достигается созданием в каждой фазе замкнутых контуров, содержаших катушки, расположенные на смежных полюсах, т. е. сдвинутых друг относительно друга на угол, равный эл. град., где m - число фаз.
Как показывают исследования, значение дем11фируюн.1.его момента, обеспечиваюшего устойчивость движения шагового двигателя в областях резонанса и автоколебаний, не превышает 10-20 /0 от номинального значения момента. Такое значение демпфируюшего момента получено в предлагаемом двигателе при снижении максимального момента двигателя приблизительно на 18%.
Реальные двигатели имеют сильно насышенную магнитную систему и зависимость .момента от тока у них близка к линейной. При этих условиях снижение макси.мального момента при вве.1ении демпфируюших катушек меньше указанных.
Непосредственное соединение основных 3 и дополнительных 4 катушек, как это показано на фиг. 1 и 2, воз.можно в случае выравнивания их активных сопротивлений, т. е. выполнения условия
Ri R2.
гдеК, - активное сопротивление основной катушки;
R2 активное сопротивление дополнительной катушки.
Выполнение этого условия приводит к необхо;и1мости на.мотки основных и дополнительных катушек, что нетехнологично. При намотк, катуп.1ек проводом одинакового сечении и непосредственное парал„чельное включение катуп1ек в установившемся режиме недопустимо. В этом случае используют подключение дополнительных катушек через конденсаторы 5, как показано на фиг. 3. Такое включение дополнительных катушек 4 устраняет их влияние на макси.мальный статический .момент, поскольку в режиме останова ток по дополнительным катушкам не протекает. Включение конденсатора 5 в замкнутый контур позволяет также путем варьирования его емкости достигнуть опти.мальных условий демпфирования за счет уменьшения влияния индуктивного сопротивления обмоток.
Технико-экономический эффект от внедрения предлагаемого устройства обеспечивается за счет более плавной отработки единичных шагов, что позволяет расширить скоростной диапазон работы двигателей, поскольку де.мпфирование двигателей позволяет либо полностью исключить зону резонансов, либо сушественно ее сократить, а также увеличить точность позиционирования двигателей при отработке единичных шагов за счет сокрандения величины дина.мической ошибки двигателей при демпфировании. Кроме того, замена используемого в настояш.ее время механического инерционного демпфера упрощает конструкцию и эксплуатацию шаговых двигателей.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
5 У
lioMMLjmcirrrajj
И
фиг.2.
Н
