(54) ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР
I
Изобретение относится к средствам позиционного регулирования и может быть испопьзовано при позиционном регупировании разпичных технологических параметров, сигнапизации предельных значений, при автоматизации вспомогательных операций, а .именно при заполнении и опорожнении технологических емкостей, управлении двухпозиционными органами и т. а.
Известны пневматические регуляторы, поддерживающие технологический пара- метр в некотором заданнстл аианазоЯе и имеющие регулируемую зону возврата И .
Регулятор ПР1.6 в указанном источнике предназначен для получения дискретных пневматических сигналов О в1 Щ)И выходе параметра за пределы установленной зоны нечувствительности.
Однако функциональные возможвос и этого регулятора ограничешл, так как зона неоднозначности статической харакп, тёристики при любом значении зааашга остается симметричной что создает труог яости при необходшлости независимой
настройки максимального и.минимального, значения регулируемого параметра.
Известен также пневматический регулятор с настраиваемой зоной возврата, в котором установлены постоянные дроссели и делители давлений, а сопла элемента сравнения соединены через постоянные дроссели с канале питания, через делители давлений с двумя другими вводами элемента сравнения и непосредственно - с управляющими входами переключающего .
Однако область применения этого регулятора ограничена из-за функционального недостатка, свдзанного со сравнитель- но невысоким быстродействием, так как в Линии петания последовательно включены дроссели и емкости камер элемента сравнения..
Цель изобретения - улучщение динамических характеристик регулятора.
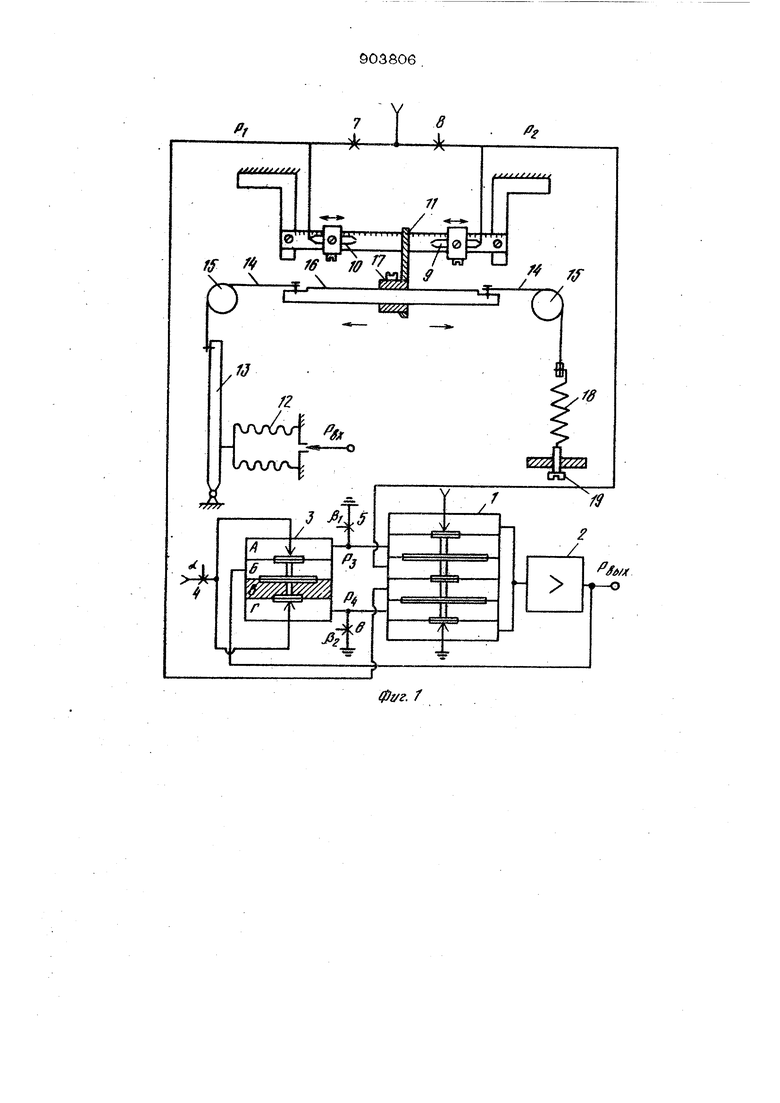
Эта цель достигается тем, что в пнеь матическом позиционном регуляторе, содержашем подключенный первыми плю 3бо совой и минусовой камерами к входным каналам элемент сравнения, выход которого соединен со входом усилителя мотцностн, переключающее реле и дроссельны делителя, установленные в каналах обрат ных связей, выход усилителя мощности подключен к управляющей камере переключающего реле, сопла которого через один из дросселей делителей подключены к каналу питания, а проточные камеры соединены со вторыми плюсовой и минусовой камерами элемента сравнения ц . через другие дроссели целителей с атмосферой. На фиг, 1 указана принципиальная схе ма устройства; на фиг. 2 - статические характеристики регулятора для различных значений петпи гистерезиса. Пневматический позиционный регулятор состоит из пятим ем бранно го элемента 1 сравнения, работающего в релейном режиме, усилителя 2 мощности, подключенного на выход элемента сравнения трехмембранного переключающего реле 3, управляемого выходным давпение усилителя мощности, дроссельных делителей обратных связей 4-5 и 4-6, работаюшюс поочередно. К первым плюсовой и минусовой камерам элемента 1 сравне ния подключаются входные каналы в виде давлений воздуха. Однако вхоаные каналы могут быть подключены и через специальный преобразователь, представленный на фиг. 1 и состоящий из постоя ны.х дросселей 7-8 и управляемых сопел 9 и Ю, соединен ых между собой по мостовой схеме, подвижной заслонки 11 управляющей соплами 9 и Ю, пололсение которой определяется значением входного давления В этом случае к первым плюсовой и минусовой камерам элемента сравнения подаются соответственно цавл ния Н и Р , образованные между соплом 9 и дросселем 8, соппом 10 и дро селем 7. Во вторую плюсовую камеру элемента сравнения постунает сигнал обратной свя эй FI с выхода дроссельного делителя на аросселясх 4-5, . а во вторую к-ганусову камеру, - сигнал обратной связи Р/, с выхода дроссельного делителя . Причем сигнал обратной связи, P в зависимости от открытия или закрытия вер вего сопла треза ембранвого реле опреде и РЗ ляется соответственно Р, 3 р, А сигнал Рк в зависимости о.т оглрытия или закрытия нижнего сопла опеделяется соответственно R , Заесь -itВходное давление R регулятора приложено к сильфону 12, жесткий центр которого соединен с рычагом 13. Один конец рычага, шарнирно закреплен к основанию, а другой конец с помощью металлической ленты 14 и через направляющий ролик 1 5 крепится к перемещающемуся прямолинейно металлическому стержню 16. Металлический стержень 16 входит во втулку , которая фиксируется на стержне с помощью винта 17 в любом положении. Со втулкой жестко соединена заслонка 1 1 . Усилие создаваемое сильфоном 12 и приложенное к одному концу металлического стержня 16 уравновешивается эластичным усилием пружины 18. Натяг пружины первоначально регулируется винтом 19. Соп.па 9 и 10 служат соответственно для независимой настройки минимального и максимального значения входного давления. Таким образом, расстояние между соплами определяет ширину, петли гистерезиса статической характеристики регулятора. Регулятор работает следующим образом. При положении заслонки 11, при котором сопло 9 находится в закрытом состоянии PJ Р и Р о, а алгебраическая сумма входных давлений элемента сравнения определится как -R О. Это- неравенство обеспечивает закрытие верхнего сопла в элементе сравнения и открытие нижнего сопла. Вследствие этого выходное давление регулятора,, а также давление в управляющей камере трехмембранного переключающего реле упадет до О, Под воздействием давления подпора в другой камере трехмембранного релб верхнее сопло закрывается, а нюкнее сопло открывается. В результате этого давление F быстро увеличивается по абсолютному значению, а давление R уменьшается до О. Этот процесс значительно ускоряет переход выходного давления из одного устойчивого состояния в другое и еще больщз усиливает неравенство в форме алгебраической суммы входных давлений 1 -Г + Я( О С увеличением входного давления Р заслонка 11 отходит.от сопла 9, вызывает падение давления F| до 0 т. е. 1 F О. Падение давления F| ао О не изменяет знак- неравенства алгебраической суммы, а только несколько ослабляет его R Pj -HP, -Рц о. Вслеаствие этого верхнее сопло элеме та сравнения продо;лжает оставаться закрытым , а нижнее сопло - открытым. Выходное давление регулятора остает ся равным О. Такое состояние регулято ра не меняется пока оба сопла 9 и 10 остаются открытыми. При некотором значении входного давления , когда сопло 4-0 закрывается заслонкой 11, дав ление Р увеличивается до величины давления питания, а давление Р остается равным О. Знак алгебраической суммы входных давлений изменяется с отрица, тельного на положительный: 1 Здесь значения давлений F и R зависимости от степени открытия дросселей 4, 6 и 5, определяются из соот- ,ct Р -- PnuT Р,.-7-Г-РПИТ ношений Н 5 -Pi При положительном знаке этого нера венства мембранный блок элемента сравнения переместится вниз, нижнее сопло закроется, а верхнее сопло откроется. Давление на выходе элемента сравнения а также и на выходе усилителя 2 мощности станет равным давлению питания. Этому будет соответствовать закрытие нижнего соппа и открытие верхнего сопп трехмембранного реле 3. Это вызовет падение давления Е до атмосферного да ления и повышение давления 1 до давг пит я результате увел - .. чение- давления F еще больше уско-Знак алгебраической суммы усилится т. е. 1 -Pji+Pj -Рц О.,, Если при этом входное давление F уменьшается то заслонка 11 отойдет от сопла 10, уменьшая давление Ц до атмосферного. Но это не изменяет знак неравенства, а только несколько ослабля ет его, т.е. 1 -1| +1 -1 О. Выходное давление Р,ц регулятора остается равным своему максимальному значению. Значение выходного давления изменяется, когда сопло 9 оказывается закрытым. Таким образом, благодаря переклктаевшо больших по величине входных сигналов в элементе сравнения изменение выходного давления регулятора из одного предельного значения в другое происходит практически мгновенно. Испытания предложенного регулятс а в. реагентном цехе Баквоцопровоца на резервуарах для промывки фшштров и на резервуарах для очищенной воды подтвердили надежную работу и быстродействие предложенного регулятора. При этом наблюдалось уменьшение потерь реагента. Эффективность предложенного устройства в точности отработки петлевой характеристики и большего быстродействия определяется не только входным узлом в большей степени выполнением триггера по новой схеме. . Предложенный регулятор позволяет достичь высокую точность отработки петлевой характеристики и возможность изменения ширины зоны, не однозначное г и и в Ш1ФОКВХ пределах. Формула изобретения Пневматический позиционный регупятор, содержащий подключенный первыми плюсовой и минусовой камерами к входным каналам элемент сравнения, выход которого соединен со входом усилителя мощности, переключающее реле и дрос - сельные делители, установленные в каналах обратных связей, отличающий с я; тем, что, целью у1 учще- кия динамических характеристик регулятора, выход усилителя мощности поц-. к люмен к управляющей камере переключающего реле, сопла которого через один из дросселей делителей подключены к каналу питания, а проточные камеры соединены со вторыми плюсовой и минусовой камерами элемента сравнения и через другие дроссели .делителей - с атмосферой. Источники информации, принятые во внимание при экспертизе .1. Справочник. Автоматические приборы, регуляторы и управляющие машины. Ленинград, Машиностроение, 1968, с. 395. . .2. Авторское свидетельство СССР № 487378, кл, S05 В 11/44, 1973 (прототип).
flf -k8
7
fl
4

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое управляющее устройство | 1980 |
|
SU903805A1 |
| Пневматический генератор | 1976 |
|
SU620690A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU622046A1 |
| Пневматический финитный регулятор | 1988 |
|
SU1522151A1 |
| Устройство для приема пневматических дискретных сигналов | 1980 |
|
SU959133A1 |
| Пневматическое вычислительное устройство | 1976 |
|
SU596963A1 |
| Пневматический двухпозиционный регулятор с настраиваемой зоной нечувствительности | 1989 |
|
SU1755256A1 |
| Пневматический генератор импульсов | 1988 |
|
SU1666816A2 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |

1пГ7
fff
/J
/
fZ
fy
.
/vw
7/
у
D 0
/ ff
й335
:
ES
f9
/.
Wxf
Й/г /
ff,2ff,ff0,ff0,8f .
фиг. г
