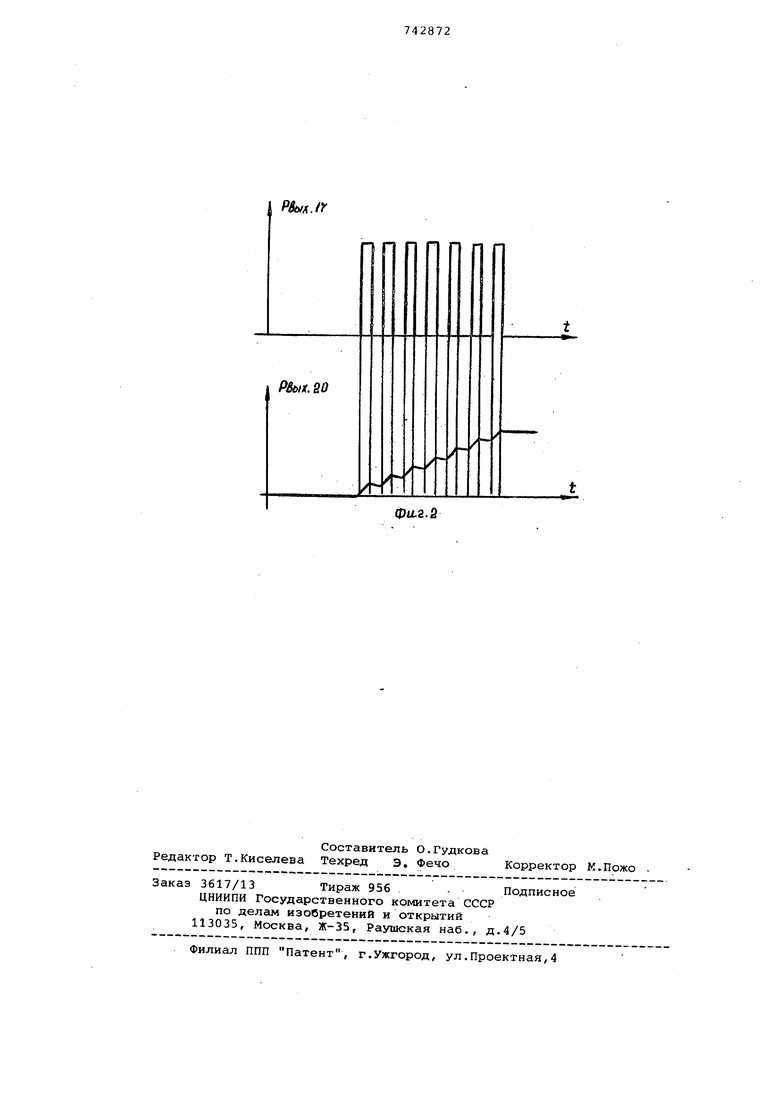
Изобретение относится к технике автоматического регулирования к управления,а именно к пневматическим адаптивным регуляторам с переменной структурой, и может быть использовано для адаптивного управления сильно нестационарных объектов нефтехимичес кой, нефтеперерабатывающей и др. отраслей промышленности. Известен регулятор с переменной структурой, содержащий регулирукадий блок, состоящий из первого сумматора входы которого соединены с входными каналами опорного давления, параметра и задания, а выход, через переключающее реле и переменные дроссели с минусовой камерой элемента умножения на постоянный коэффициент, выход которого является выходным каналом регулятора, блок формирования функци переключения, входы которого соедине ны с каналами опорного давления, параметра к задания, а его управляющий выход с переключающим реле ИЗ . Наиболее близким к предлагаемому по своей сущности является регулятор содержащий два пятимембранных сумматора, соответствующие входы KOTOI соединены с входными каналами опорного давления, параметра и задания, выход первого пятимембранного сумматора соединен с одним из входов элемента ИЛИ и через- переключающее реле и параллельно включенные два переменных дросселя - с минусовой камерой элемента 5 лножения на постоянный коэффициент, выход которого является выходом регулятора, выход элемента ИЛИ соединен- со входом управляемого сопротивления, выход второго пятимембранного сумматора соединен через второй вход элемента ИЛИ с отрицательной камерой анализатора, выход которого соединен с управляющим : входом переключающего реле 2. Недостатком известных регуляторов являетря то, что жесткое установление .коэффициента функции переключения, во-первых, не позволяет достичь максимальное быстродействие, так как для улучшения быстродействия системы во время существования скользящего рейсима, требуется перестройка коэффициента функции переключения, в зависимости от изменения параметров объекта, во-вторых, для названных объектов использование известного регулятора не обеспечивает существование скользящего режима при полном диапазоне изменения параметров объекта. А это приводит к потере важного свойства - свойства инвариантности к изменениям параметров объекта. Следовательно, известный регулятор обладает ухудшенными динамическими характеристиками (пониженное быстродействие, точность и т.д) при регу-, лиравании сильно нестационарных объектоЕ. Цель изобретения - улучшение ди намщческих хара.ктеристик регулятора при i регу лировании сильно нестационарных объектов. Йоставленкая цель достигается тем что выходуправляемого сопротивления соединен с первым входом первого блока предварения, выход первого элемента Или соединен соответственно с поло жительной и отрицательной камерами nepteoro и второго элементов сравнения со входами первого и второго блоков прерварения, выход первого блока предварения соединен непосредственно с положительной и через третий переменный дроссель и емкость -с отри. дательной камерами третьего элемента сра|Внения, выход которого соединен с .однмм %з входов элемента Неравноэ нач HocJTb 7 второй вход которого соедине о выходом анализатора знака, а выход первый нормально закрытый клапан соединен с соплом второго нормаль но . закрытого клапана и через апери одическое звено и повторитель соединен со вторым управляющим входом упрайляемого сопротивления, выходы бло KOip предварения через второй элемент .ИЛИ соединены с положительной камеро второго элемента .сравнения, выход ко торого через третий элемент ИЛИ соед . нен с управляющим входом второго нор мально закрытогоклапана, второй вход третьего элемента ИЛИ соединен с выходом первого элемента сравнения а выход первого блока предварения соединен с положительной камерой ана лизатора знака. На .фиг.1 показана принципиальная схема предложенного регулятора; на фиг.2 - график работы апериодического зв4на. Регулятор содержит первый пятимембранный сумматор 1, переключающее реле 2, переменные дроссели 3 и 4, элемент 5 умножения на постоянный коэффициент, второй пятимембранный сумматор б, элемент 7 ИЛИ, управляемое сопротивление 8 с начальным значением, первый блок предварения,вклю чающий емкость 9, элемент 10 сравнения, анализатор 11 знака, переменный дроссель 12, емкость 13, элемент 14 сравнения, .элемент Неравнозначность включающий реле 15 и 16, первый нормально закрытый клапан 17, апериодическое звено, включающее переменный россель 18, емкость 19, повторитель 0, второй блок предварения, включащий переменный дроссель 21, емкость 2, элемент 23 сравнения, элемент 24 ЛИ, элементы 25 и 26 сравнения, лемент 27 ИЛИ, второй нормально зарытый клапан 28. Адаптивный регулятор построен на тандартных элементах промышленной невмоавтоматики УСЭПА. Регулятор работает следующим обазом. Сигналы в виде давления сжатого оздуха, пропорциональные текущему начению -регулируемого параметра Р его заданному значению РЗ, постуают соответственно по каналам задаия и параметра в первую минусовую и торую плюсовую камеры сумматора 1, во вторую плюсовую и первую минусоую камеры сумматора б, а в их перые плюсовые камеры подводится сигнал опорного давления по каналу опорного давления. Регулятор выполняет алгоритм управления в виде Рёш.ш . (х , К 5 S.0 } Рбил регулирующее воздействие, Рх - сигнал рассогласования, РХ Р« -РЗ у - коэффициент усиления регулятора, S - функция переключения (, прямая скольжения), коэффициент которой перестраивается при изменении параметров объекта до достижения своего оптимального значения в однозначной зависимости с изменением выходного сигнала адаптивного контура РО® . Выходной сигнал сумматора 1 5 gbiic,t РО -Ptt + Р, (2) проходя через проточные камеры -реле 2, переменные дроссели 3 и 4, поступает в минусовую камеру элемента умножения на. постоянный коэффициент 5, на выходе которого отрабатывается регулирующее воздействие вида ,.«( -р) где К получает одно из двух значений К( или Kj, в зависимости от уровня сигнала, формируемого при помощи блока формирования функции переключения сум аторы 1,6 .элемент 7 ИЛИ, управляемое сопротивление 8, емкость 9, элемент 10 сравнения Рвш,о Гп,-. (4) и анализатора знака 11, к входам которого подаются сигналы Pfiff.ie и Р/ьо. а на выходе получается вь., , постоянная времени первого узла предварения. () перестраиваемый коэф фициент функции пере о /ГРНключенияпроводимость управля емого сопротивления, значение которой изменяется в зависимос ти с изменением РаЗ. При этом с помощью сумматоров 1 и 6 и элемента 7 ИЛИ вычисляется модул ошибки ) / Л -л . г &/Г. (6) Принцип работы адаптивного контура построен на основе анализа скользяще го режима и переходного процесса. Условие существования скользящего режима имеет вид . Это выраже ние определяет работу блока анализа скользящего режима. На входы элемента 14 сравнения поступает сигнал Pgifjc,fff , на выходе которого получается сигнал . f т, Р&ос./ поступают на входы элемента 15 и 16 Неравнозначность, на выходе которого отрабатывается ск5гна /. 16 (. 9 )xdi(( илиже г inpu S. 0 /&/Х./6 0п/ S Idt 0 Факт возникновения скользящего режима характеризуется серией импульсов в виде сигнала Pgcixje который через нормально закрытый клапан 17 (предотвращает обратное течение сигнала и формирует импульсы) постуаает на вход апериодического звена, выход которого определяется выражением Pebi.i7 -7F где Та Q постоянная времени. Скорость изменения коэффициента функции переключения, т.е.скорость перестройки прямой скольжения и точность перестройки определяется значелием изменения проводимости переменного дросселя 18 апериодического звена. Это значение выбирается экспериментально по наименьшему времени переходного процесса. Как видно из графика фиг.2 , при наличии скользящего режима с помощью серии импульсов формируется сигнал РОЭ . Сигнал Ра& , подключенный ко второму управляющему входу управляемого сопротивления 8, однозначно меняя проводимость управляемого сопротивления с начальным значением И, поворачивает прямую скольжения по часовой стрелке к границе существования скользящего режима, где скольжение происходит с максимальной скоростью. Один из управляющих входов сопротивления 8 соединен с давлением начального значения Рн (Со) . При срыве скользящего режима, т.е. rfoiS ,. Л при U 5Т прямая скольжения сохраняется с предыдущим коэффициентом (регулятор работает на границе срыва скольжения). Работа блока анализа переходного процесса : (первый и .йторой блоки предварения, элементы 24 и 27 ИЛИ, элементы 25 и 26 и клапан 28) происходит следующим образом. Сигнал Pfjix. р поступает., на входы блока предварения, на выходе которого получается сигнал Рбь.2 --Топ - -1 -Ро Далее ,3 и поступают на выходы элемента 24 ИЛИ, выход которого равен /., р . -{ dt о1 .lP,l.PoJ Этот сигнал сравнивается с Р, и на выходе элемента 26 ш.-1еем %ш. Sut. ftf se- соедияены входами элемента 27 ИЛИ, на выходе олучается сигнал в„г7-W / - / огда I ai I т.е.когда остигается начало координат на фаовой плоскости с помощью Р5нх.57 ыход сообщается через нормально зарытый клапан 28 с атмосферой и оэффициент прямой скольженИя полуает свое .начальное значение Со. При изменении условия работы бъекта процесс адаптации повторяетя и протекает аналогичным образом. Таким образом, предложенный реулятор обладает свойством самонатройки, т.е. в зависимости от измеения параметров объекта, которые освенно характериз ются наличием системе СКОЛЬЗЯЕЩХ режимов, перетраивается коэффициент функции перелючения, тем самым, достигается
высокоточное регулирование
сильно нестационарных объектов.
Формул а и 3 о D ре т а н и я
Пнезглатлческий адагггквный регулятор с переменной структурой, содержащий два, пятимембранных сумматора, соответствующие входам которых соединены с входными каналаг4и опорного давления, параметра и з лдания, выход первого пятимембранного cyt/uv.aTopa соединен с одним иа входов первого элемента ИЛИ и через переключающее рфле и параллельно включенные два нерфменных дросселя - с минусовой камфрой элемента умпожения напостояннай 1соэф| ициенГ, вгзоюд которог-о , ябляется выходом регулятора, выход первого элемента ШШ соадкнек со вkoдa ш управляемого сопротивлеЕ ия, в|аход второго пятимег-дбранкохчэ сумм тора соединен через второй вход элемента ИЛИс отрицательной камерой анализатора знака, выход которого с управляющим входом переключЬюшего реле, о т л и ч а ю щ и й О: я тем, что, с целью улучшения динамических характеристик регулятЬра, он содержит блоки предварения, элементы сравнения, третий переменнЬй дроссель , емкость ,- элемент Неравнозначность, нормально закры: jbie клапаны, апериодическое звено,
г(о&торитель/второй и третий эл1;мёнты ИЛИ, причем выход управляемого сопротивления соединен с первым уходом первого блока предварения,
ВЫХОД первого элемента ИЛИ соединен
соответственно с полакктельной и отрицательной камерами первого и второго элементов сравнения, со входам ; первого к второго блоков предварения., выход первого склока предварения соединен непосрадственао с полойа1тельной и через третий переменный дроссель и емЕсость - с о1рица тёльной камерами третьего элемента сравнения, выход которого соединен с одним из входов элемента Неравкозначностн, второй-вход которого соединен с выходом анализатора знак а выход через первый нормально закрытый клапан соединен с соплом второго нормально закрытого клапана и через апериодическое звено и повторитель соединен со вторым управляетдим входом управляемого сопротивления, вьаюцы блоков предварения через второй элемент ЮТИ соединены с положительной камерой второго элемента сравнения, выход которого через третий элемент ИЛИ соединен с управляющим входом второго нормально закрытого клапана, второй вход третьего элемента ИЛИ соединен с выходом первого элемента сравнения, а выход первого блока предварения соединен с положительной камерой анализатора знака.
Источники информации, принятые во внимание при эксдертизе
1.Пневмоавтоматика. Наука, 19 с. 122, рис.2,
2.Беренде Т.К. и др,
. Элементы и Машиностросхемы пневмоавтоматики.
епие 1968, с.177, рис.110 /прототип),
PBtfu.ir


| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор с переменной структурой | 1977 |
|
SU679939A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU631869A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU684508A1 |
| Пневматический регулятор переменной структуры | 1974 |
|
SU533910A1 |
| Пневматический финитный регулятор | 1988 |
|
SU1522151A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
| Адаптивный пневматический регулятор | 1977 |
|
SU661505A1 |
| Пневматический регулятор с переменной структурой | 1974 |
|
SU540256A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
. SO
фи,2.й
