(54) ЧАСТОТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ Изобретение относится к контрольноизмерительной технике, и в частности к измерению быстроменяющихся параметров движения, деформаций. Известно устройство, содержащее индуктивный датчик выпопненный в внде соленоида, обмотка которого включена в контур генератора с самовозбуждением и блока обработки частотного сигнала. Весь рабочий диапазон их преобразователя ап проксимирован определенным чистюм отрезков гипербол и в зависимости от чао-, тоты генератора бпок обработки сигналов с учетсал аппроксимаоин формирует результат преобразования 13. Недостатками этого устройства являют ся сгаожность и ограниченные динамичес- кие характеристики преобразователя. Наиболее близким к изобретению по технической сущности является преобразо вате ль, в которок выходная частота импульсов связана со значением измеряемой индуктивности, причем последняя включается в цепь импульсного делителя. Кроме импульсного делителя напряжения преобразователь содержит интегратор, гистере- зисный элемент и переключатель биполярных напряжений, Последовательное включение указанных элементов образует редакционную схему 12. Недостатком известного преобразователя является отсутствие динамической коррекции, позволяющей повысить точность преобразования и расширить частотный диапазон средств измерения. Цель изобретения - расширюние функциональных возможностей частотно-им- путшсного преобразователя быстроменяюших параметров движения. Поставленная цель достигается тем, что в частотный датчик перемещения, содержащий последовательно соединенные гистерезисиый элемент, переключатель биполярных напряжений и интегратор, между выходом интегратора и входом гисте- резисногЬ элемента введены последовательно соединенные допопнительный ин тегратор, . трансформаторный датчик и
39060014
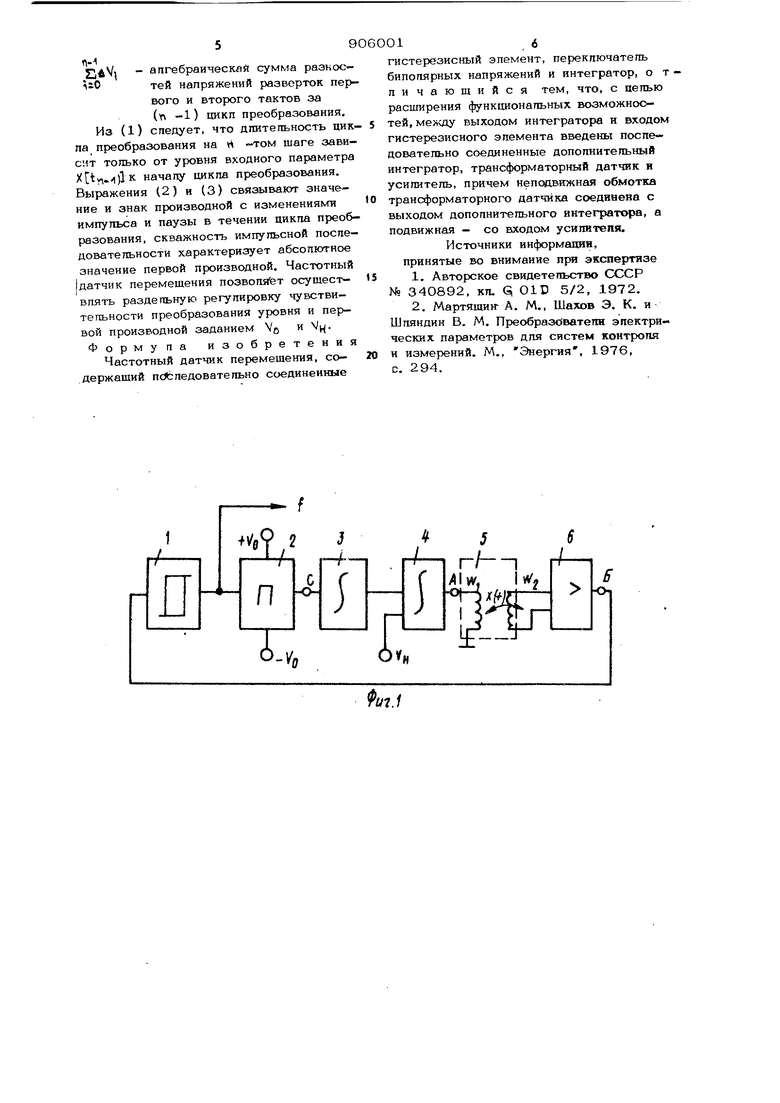
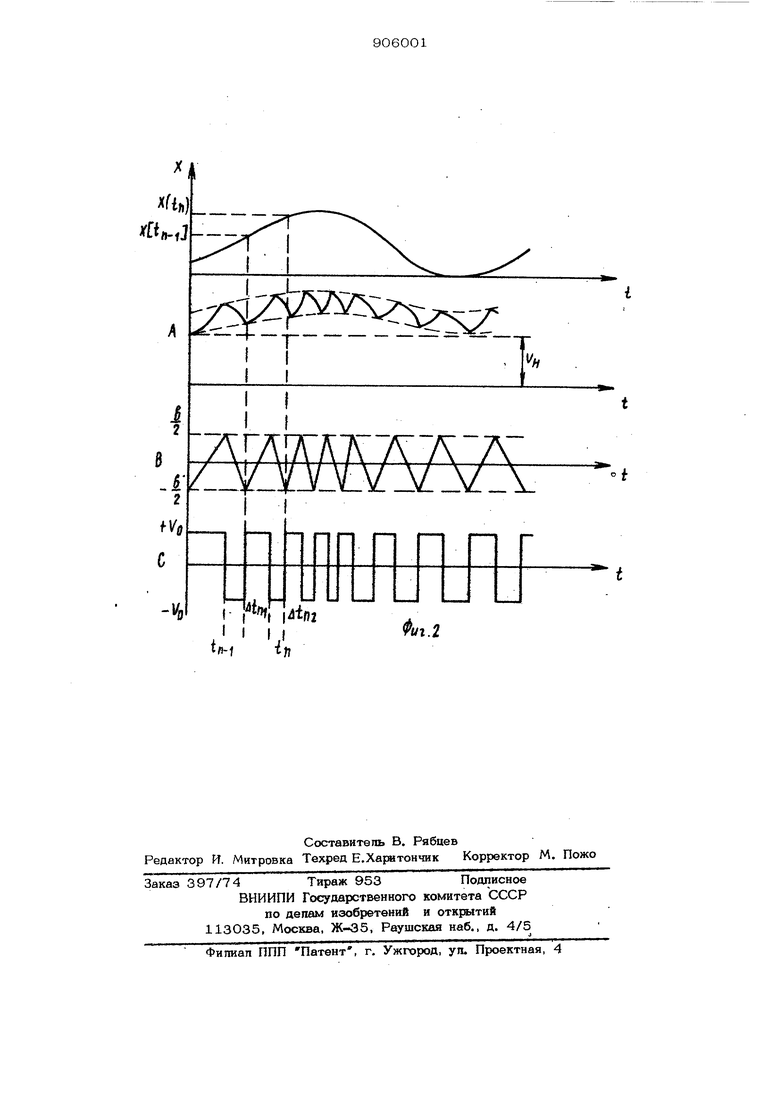
усилитепь, причем неподвижная обмоткаТаким образом в устройстве поддертрансформаторного датчика соединена с вы- живается автоколебательный режим. Походом допопнитегаьного интегратора, а подвижная - со входом усигштепя. На фиг. 1 представлена функциональная схема частотного датчика перемещения; на фиг. 2 - временные диаграммы, поясняющие его работу. Датчик содержит гистерезисный эле- мент 1, переключатель 2 биполярных напряжений, интегратор 3, дополнительный интегратор 4, трансформаторный датчик 5 и усилитель 6. Устройство работает следующим образом. Формирование периода испупьсной поспедоватепьности на и -том цикле осуществляется в два такта. Первый такт характеризуется тем, что на вход интегра тора 3 . поступает напряжение -fVp. В реэультате двойного интегрирования с вы- коца дополнитеиьного интегратора 4 на неподвижную обмотку поступает напряжение, изменякиаееся по квадратичному закону, что приводит к формированию в рабочей зоне трансформаторного датчика 5 магнитной индуквви, изменяющейся во времени также по квадратичному закону. Изменение магнитной индукции ваопь координаты X (при постоянном токе в не- подвижной обмотке W ) имеет иннейную зависимость. Потюжениб подвижной обмо1 ки M/ij в рабочем зазоре определяется измеряемым параметром и скоростью его изменения. В результате и иеиения маг- иитного потока через /,ii вызванного изменением тока в неподвижной охотке Ч/ и перемещения подвижной обмотки Wi по координате Х в ней наводится ЭДС. которая усиливается и поступает на вход гистерезисного элемента 1. В м( времени, обозначенный на временной диаграм ме i f. уровень выходного напряжения уситштепя 6 превьиыает порог J гистерезисного элемента 1, что вызывает его срабатывание и изменение полярности Vg на входе интегратора 3, С этого момента на шнается второй такт преобразования, который характеризуется изменением полярности квадратичного напряжения на выходе интегратора 4. В первом такте напряжение увеличивается, во втором уменьшается. Второй такт длится до тех пор, пока величина усиленной ЭДС, но уже обратной полярности не становится меньше порога 1,-т-) гистерезисного элемента 1. Окончание второго такта ознаj чает начало первого такта (.) цикла преобразования. пучаемыо на выходе гистерезисного элемента 1 импульсы отражают как уровень, так и скорость изменения выходного параметра. В рабочей зоне трансформаторного датчика 5 величина магнитного потока через подвижную обмотку определяется произведением тока в неподвижнбй обмотке )(/., и координаты , в которой находится подвижная обмотка Wn.ToK изменяется по квадратичному закону и следовательно ЭДС, соответствующая производной магнитного потока при отсутствии движения обмотки iJi , изменяется по линейному закону с коэффициентом пропорциональности равным )(. Таким образом, чем бопьше X , тем скорее наступает условие переключения гистерезисного элемента и следовательно выше частота импульсов. При гО длительности тактов преобразования равны. Перемещение подвижной обмотки л , вызванное изменением входного параметра, приводит к ПОЯБлению в ней дополнительной ЭДС, впияющей на дштельности тактов преобразовання. увеличивается длительность первого такта, а в случае 0 - второго такта. Работа частотного датчика пе- ремещеннй описывается выражениями, Ха- рактеризующими влияние уровня (г„.)|его . л ,кл , f jJimj%t.4i j ич.л v , д I . ; l V/ первой производной Su. на частоту и длительность импульсов в п -том цикле преобразования. п--к; 1г, .ъ-т,. ; VT4Mi Voxft., V|itvS i ., ok где К - коэффициент пропорциональности, учитывающий электрические и магнитные свойства датчика;- - постоянная времени интеграторов;- порог срабатывания гистере- зисного элемента 1;. , - начальное напряжение на выходе дополнительного интегра-. тора 4; )((.-t)- уровень входного параметра к началу п -i-o цикла преобразования; - апгебраическая сумма разнос- i-0тей напряжений разверток первого и второго тактов за (ti -1) цикл преобразования. Из (1) следует, что длительность никпа преобразования на Ц -том шаге зависит TOTibKO от уровня входного параметра .-i)lK началу цикла преобразования. Выражения (2) и (3) связывают значение и знак производной с изменениями импупьса и паузы в течении цикла преобразования, скважность импульсной последовательности характеризует абсолютное значение первой производной. Частотный датчик перемещения позвопя1ет осуществлять раздельную регулировку чувствительности преобразования уровня и первой производной заданием Vo и V. Формула изобретения Частотный датчик перемещения, содержащий псЛЬледовательно соединенные 9 01и гистерезисный элемент, переключатель биполярных напряжений и интегратор, о т ли чающийся тем, что, с целью расширения функциональных возможностей, между выходом интегратора и входом гистерезисного элемента введены последовательно соединенные дополнительный интегратор, трансформаторный датчик и усилитель, причем неподвижная обмотка трансформаторного датчика соединена с выходом дополнительного интегратора, а подвижная - со входом усипитепя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетел1зстБо СХЗСР N° 340892, кл. Q O1D 5/2, 1972. 2. Мартяшин- А. М., Шахов Э. К. и Шляндин В. М. Преобразйватетш электрических параметров для систем контропя и измерений. М., Энергия, 1976, с. 294.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Преобразователь скорости изменения аналогового сигнала во временной интервал | 1980 |
|
SU902252A2 |
| Трансформаторный функциональный преобразователь электрического тока | 1978 |
|
SU742973A1 |
| Преобразователь напряжения вчАСТОТу | 1979 |
|
SU819959A1 |
| Способ определения статических магнитных характеристик феррообразцов и устройство для его осуществления | 1983 |
|
SU1205087A1 |
| Преобразователь параметров трансформаторных датчиков в период электрических колебаний | 1982 |
|
SU1033985A2 |
| Бесколлекторный регулируемый электродви-гатель постоянного тока | 1968 |
|
SU303936A1 |
| Способ контроля опор электродвигателя | 1989 |
|
SU1677560A1 |
| Преобразователь параметров транс-фОРМАТОРНыХ дАТчиКОВ B пЕРиОд элЕКТРи-чЕСКиХ КОлЕбАНий | 1979 |
|
SU838610A1 |
| Синхронный электропривод постоянного тока | 1983 |
|
SU1129710A1 |
-f
5
Г/1
Iw, w.
Пп
Г
iF-
ОУ« rift-J К-У. fi-f in L V (/1.2 V
