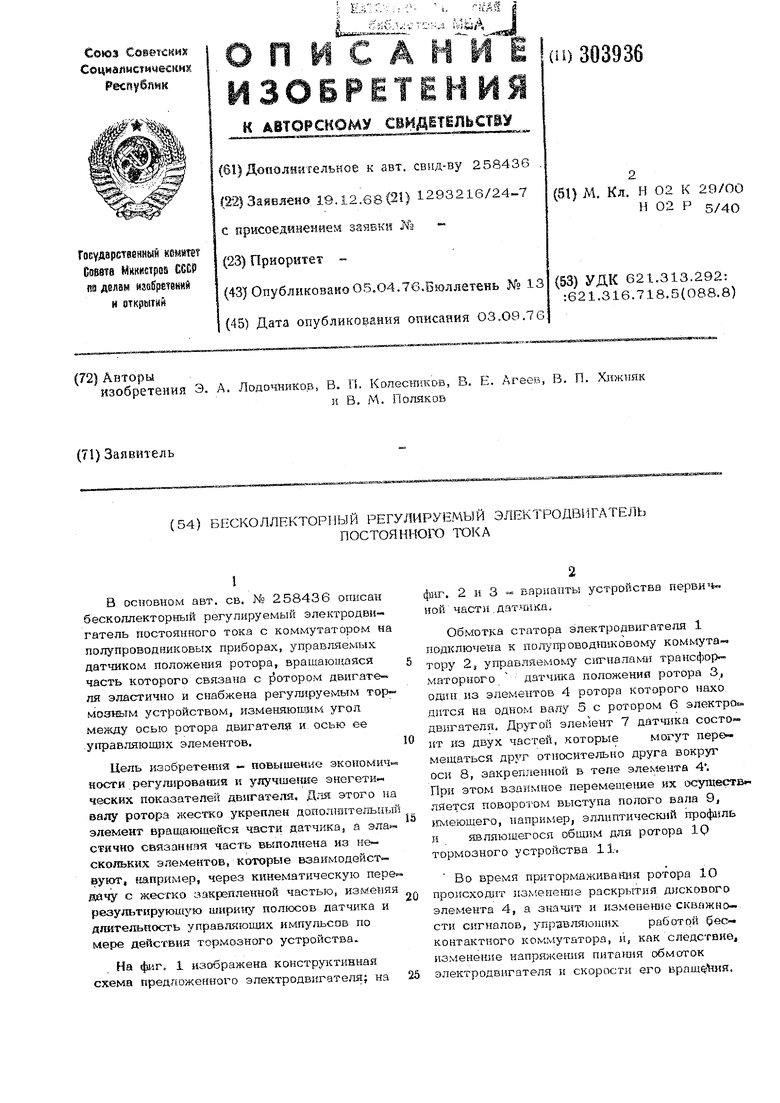
в основном авт. св. № 258436 описан бесколлекторный регулируемый электродвигатель постоянного тока с коммутатором на полупроводниковых приборах, управляемых датчиком положения ротора, вращающаяся часть которого связана с ротором двигателя эластично и снабжена регулируемым тормозным устройством, изменяющим угоп между осью ротора двигателе и. осью ее .управляющих элементов. Цель изобретения - повышение экономич ности регутфования и улучшение энегети« ческих показателей двигателя. Для этого на валу ротора гкестко укреплен дополнительны элемент вращающейся части датчика, а элар сРично связанная часть выполнена из не скольких элементов, которые взаимодействуют, например, через кинематическую пере дачу с жестко закрепленной частью, изменяя результирующую ширину полюсов датчика и длительность управляющих импульсов по мере действия тормозного устройства 4и1г. 2 и 3 варианты устройства перви ной части.датчика. Обмотка статора электродвигателя 1 подключена к ПQлyпpoвoдra кoвo гy коммута- тору 2, управляемо гу стналакл1 трансфор- маторного датчика положения ротора 3, оД15Н,из элементов 4 ротора которого нахо. дится на одном валу 5 с ротором 6 электро двигателя. Другой sneNieHT 7 датчшса состоит из двух частей, которые могут nepes. мещаться друг относительно друга вокруг оси 8, закрепленной в тепе элемента 4. При этом взаимное перемеще1ше их осупиеств ляется поворотом выступа полого вала 9, немеющего, например, эллиптический профиль и являющегося общим для ротора 10 тормозного устройства 11-. Во время приторма 1сиваЩ1Я ротора 10 происходит иза енега1е раскрытия д скового элемента 4, а значит и изменение сквпжно- сти сигналов, управляющих работой 5ес- контактного коммутатора, и, как следствие, изменение напряжешш питагтя обмоток электродвигателя и скорости его враш$ 1ия.
При использовании в качестве тормозного устройства электрической машины, на пример гистерезисной,, подключенной к источнику переменного тока, например однофазному или трехфазному полупроводниково му преобразователю постоянного тока в переменный, по достижении ротором бесще точного электродвигатели скорости, соответствующей синхронной для гистерезисной ма шины, последняя переходит в генераторный режим, развивая тормозной момент, под действием которого ротор гистерезиснай машины и связанный с ним профилирован ный выступ полого вала 9 поворачивается (в пределах синхронного угла муфты) отно- сительно ротора бесщеточного электродви гателя. Благодаря этому изменяется раС крытие элемента датчика и, как следствие, меняется напряжение питания на обмотках статора электродвигателя. При этом в завпсимости от нагрузки на валу бесщеточи ного электродвигателя указанное раскрь тие {скважность), а следовательно, напряжение питания автоматически изменяются таким образом, что скорость вращения электро- двигапеля остается постоянной и равной синхронной скорости гистерезисной машины.
Изменением частоты питания гистере зисной машишз можно изменять синхрон™ ную скорость вращения ее, и соответст- венно синхронную скорость бесодеточного электродвигателя.
При использовании в качестве тормоз- ного устройства асинхронной машины (с короткозамкнутым ротором, массивным ферромагнитным, полым немагнитным и т. п.), подключенной к однофазному или трехфазному полупроводниковому преобра- зователю постоянного тока в переменный, после достижения бесщеточнылМ электродвигателем скорости, соответствующей синхронной для асинхронной машины, асин хронная машина переходит в генераторный режим, развивая тормозной момент, под действием которого профилированный выступ полого вала 9 поворачивается (в пределах синхронного угла муфты) от - нос1 тельно ротора бесщеточного электродвигателя, что приводит к изменению напряжения питания обмоток статора. При этом в зависимости от нагрузки на валу бесшеточного электродв}п: ателя на пряжение питания на обмотках статора
В качестве тормозного устройства может быть использована любая электрическая машина с питанием как от источни- ка переменного, так и постоянного тока (в последнем случае обмот1 и статора могут быть заменены постоянными магни тами). Изменяя разл1-1чным образом величину тока в обмотках статора, в зависимости от типа электрической машины получают различный закон регулироваштя скорости вращения бесщеточного электродви- гателя, .Тормозное устройство может быть мехагадческим тормозом с регулируемым в зависимости от скорости вращения моментом, например, центробежным регулятором и т, п,
Бесконтактный датчик положения ротора может быть трансформаторным, индукти ным, емзостным и т. п. В каждом из этих случаев ротор датчика положения выполняется аналогично ротору трансформаторного датчика, состоящим из двух (или HecKcjifi- ких) элементов, один (или часть) ил которых закреплен неподвижно на валу бес- .щеточного электродвигателя, (или часть) - эластично связан с валам через cHHxpOHvrjnc муфту лЮбого типа, 11од1М1Ж11ЫЙ элемент ротора датчика положен я может быть закреплен жестко на калу ротора тормозного устройства.
На фиг, 2 показано такое выгшл ение, где подвижной элемент 7 ротора датчика при повороте (в пределах синхронного угл относительно неподвижнот о 4 нз.- еияет суммар1 ую щирину полюса ротора, В этом случае регулирование скорости в)Я1цепия бесщеточного электродвигателя осуществ.ляется за счет одновременного автоматического изменения напряжения питания и угла амежду напряжением питания и э, д. с холостого хода.
Подвижные элементы ротора датчика (см. фиг. 3) обеспечивают одновременное двустороннее раскрытие элементов датчика посредством профилированного выступа на полом валу 9. При этом регулирование скорости электродвигателя происходит при автоматическом изменении напряжения питания и при постоянном угле между напря жением питания и э. д. с, обмотки статура
Выполнение элемента кинематической связи, преобразующего поворот ротора тормозного устройства {в пределах с;инх- ронгюго угла )ты) отнаснте,пьно у)отора бесшеточного элоктродвигателя, также мс жет быть различш..
Формула изобретения
1; Бесколлекторный регулируемый электродвигатель постоянного тока по авт. св. № 258436, отличающийс я тем, то, с целью повышения экономичности регулирования, на валу ротора жестко укреплен дополнительный элемент вращающейся части датчика, взаимодействующий с эластично связанной частью
и изменяющий результирующую no-,j люсов датчика и длительность его управ- пяющих импуЛьсов по мере действия тормозного устройства.
2. Электродвигатель по п. 1, о т л ичаюшийся тем, что элe Ieнты эластично закрепленной части датчика связаны с жестко закрепленой частью чероз кинематическую передачу.