I
Изобретение относится к измерению скорости электрических машин и может быть исполЕэЗовано в различн.1х блоках измерения частоты вращения электроагрегатов, например, в системах диагностирования и.автоконтроля.
.Известны устройства для измерения частоты вращения электрических машин, включающие датчик пульсации фильтра и шдикатор Cl .
Недостатком этих устройств является узкий диапазон измерения.
Наиболее близким по технической сущности к предлагаемому ЯЕшяетсй устройство, содержащее датчик пульсаций, полосовой резонансный фильтр с регулируе(иой частотой резонанса, блок формирования управляющего напряжения, пропорционального частоте вращения машины и частотомер 21 . .
Недостатком известного устройства является невозможность измерения частоты вращения щирокого класса
электр гческих мащин, например, асинхронных электродвигателей.
Цель изобретения повыщение точности измерения в щироком диапазоне изменения частоты вращения асинхронных электродвигателей.
Поставленная цель достигается тем, что в устройство введен режекторный фильтр, включенный между датчиком пульсаш1Й и полосовым фильтром, а блок формирования управляющего напряжения выполнен в виде двух усилителей-ограничителей и фазочувствительного выпрямителя, причем вход первого усилителяограничителя подключен к источнику питания электрггческой мащины, вход второго усилителя-ограничителя подключен к датчику пульсаш и, выходы усилителей ограничителей подключены к входам фазочувствительного выпрямителя, выход последнего со входом управления полосового резонансного фильтра.
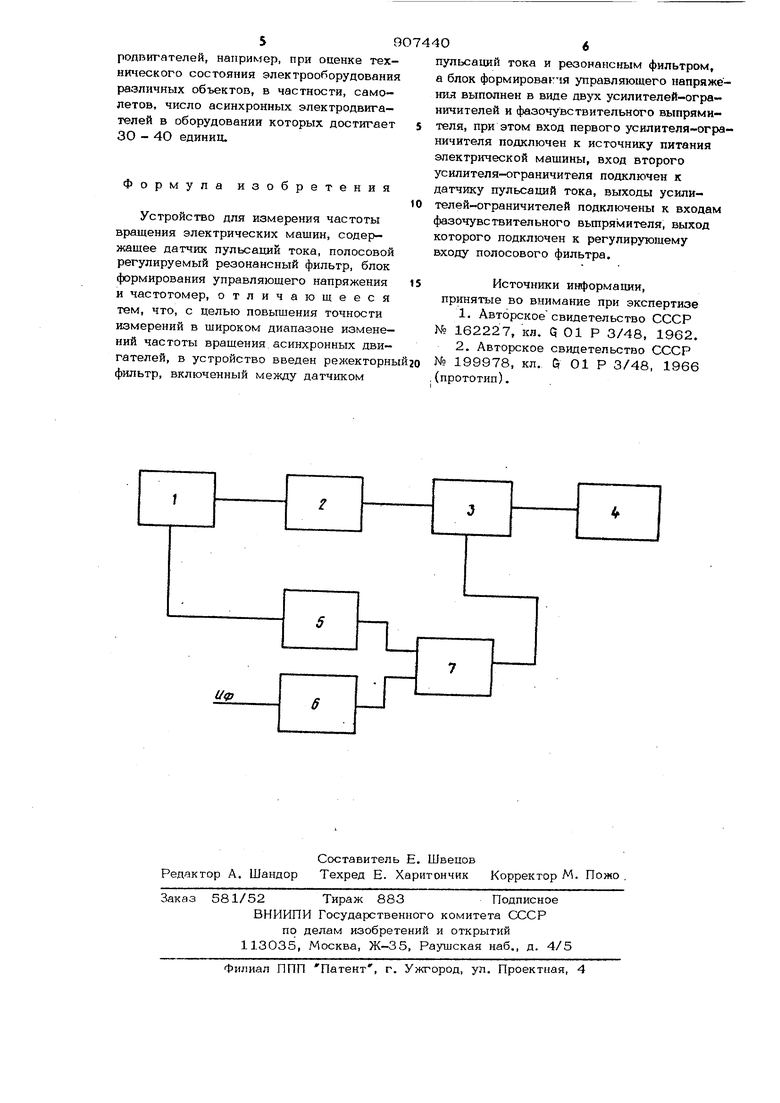
Как известно в спектре пули:п1шй Напряжения (ток/э) электрических млщин 39 постоянного и переменного тока (в том числе и асинхронных) содержится большое количество составляющих, частота которых кратна частоте вращения машин, что дает возможность использовать их в качестве сигнала последней. Так как амплитуда отдельных составляющих спект ра пульсаций соизмерима по величине, то достоверное определение частоты вращения путем измерения частоты указанных составляющих связано с применением перестраиваемых полосовых фильтров. Например, в известном устройстве используется однозвенный полосовой резонансный фильтр, а управляющий перестро кой фильтра сигнал формируется в виде напряжения, пропорционального отношению напряжения на якоре и обмотке возбужде ния машины. Поскольку пропорциональнос указанного сигнала частоте вращения сохраняется лишь у машин постоянного ток независимого и параллельного возбуяще™ НИИ, то это и ограничивает область применения известного устройства указанны ми машинами и не позволяет использоват для измерения частоты вращения асинхронных электродв1П ателей, которые находят широкое применение в народном хозяйстве. На чертеже приведена структурная схема устройства для измерения частоты вращения электрическ11Х мащин. Устройство состоит из датчика 1 пульсаций напряжения, режекторного фильтра 2, полосового резонансного фильтра 3 с регулируемой частотой резонанса, частотомера 4, блока формирования управляющего напряжения, включающего два усилителя-ограничителя 5 и. 6 и фазочувствительньш выпрямитель 7 В устройстве блок формирования управляющего напряжения выполнен в виде измерительного преобразователя сдвига (}нз между напряжением питания и током асинхронного электродвигателя. Из теории электрических машин известно, что с изменением частоты вращения ротора асинхронной машины, а следовательно и скольжения, угол сдвига фаз напрял ением и током первичной обмотки изменяется (с увеличением частоты вращения фазовый сдвиг увеличивается, и наоборот). Зависимость между частотой вращени ротора п и углом фазового сдвига в общем случае нелинейная. Однако в рабо чем диапазоне изменения частоты враиге ния ротора, соответствующем изменению скольжения от 1,5 + 2 до 6 + 8%, как показывают эксперименты, проведенные на ряде асинхронных двигате)1ей промьпцленного и авиационного типа, а также зависимости 005 (.5 построенные при помощи круговых диаграмм, нелинейность между п и углом 4 не превышает 2+3%. Следовательно, замеряя сдвиг фаз между первичными напряжением и током, можно судить о частоте вращения ротора, а формирование управляющего сигнала в виде напряжения, пропорционального сдвигу фаз между напряжением питания и током электродвигателя позволяет осуществлять перестройку полосового резонансного фильтра таким образом, что в полосе его пропускания находится только выбранная гармоника спектра, например, зубцовая. Для реализации операции преобразования сдвигафаз между напряжением и током электродвигателя в предлагаемом устройстве используется фазочувствительный выпрямитель 7, постоянство амплитуд сигналов тока и напряжения на входе которого обеспечивается с помощью соответствующих усилителей-ограничителей 5 и 6. В качестве датчика 1 пульсаций целесообразно использовать шунт амперметра в цепи обмотки электродвигателя, поскольку снимаемое с него напряжение содержит и сигнал пульсаций, и сигнал тока. С целью обеспечения нормальной работы перестраиваемого фильтра между ним и датчиком пульсаций включен ре- жекторный фильтр 2, не пропускающий составляющую с частотой сети. Таким образом, настоящее устройство обеспечивает возможность измерения частоты вращения асинхронных электродвигателей с высокой точностью и в широком диапазоне ее изменения. В свою очередь обеспечение указанной возможности обуславливает упрощение процесса измерения за счет исключения необходимости демонтажа и частичной разборки контролируемых электродвигателей (с целью доступа к вращающимся частям и использования стробоскопического метода измерения частоты вращения), ибо большинство асинхронных электродвигателей, встроенных таходатчиков не имеет, а другие методы измерения частоты вращения ire обеспечивают требуемой точности. Это в коночном итоге дает возможность существенно сократить затраты на прпи денио контроля чвгтоты .iiiiP 4i г-.лгктродвигателей, например, при оценке технического состояния электрооборудования различных объектов, в частности, самолетов, число асинхронных электродвигателей в оборудовании которых достигает 30 - 40 единиц. Формула изобретения Устройство для измерения частоты вращения электрических машин, содержащее датчик пульсаций тока, полосовой регулируемый резонансный фильтр, блок формирования управляющего напряжения и частотомер, отличающееся тем, что, с целью повышения точности измерений в широком диапазоне изменений частоты вращения асинхронных двигателей, в устройство введен режекторны фильтр, включенный между датчиком пульсаций тока и резонансным фильтром, а блок формировакчя управляющего напряже- НИЛ выполнен в виде двух усилителей-ограничителей и фазочувствительного выпрямителя, при этом вход первого усилителя-ограничителя подключен к источнику питания электрической мащииы, вход второго усилителя-ограничителя подключен к датчику пульсаций тока, выходы усилителей-ограничителей подключены к входам фазочувствительного вьшрямителя, выход которого подключен к регулирующему входу полосового фильтра. Источники информации, принятые во внимание при экспертизе 1.Авторскоесвидетельство СССР № 162227, кл. Q 01 Р 3/48, 1962. 2.Авторское свидетельство СССР № 199978, кл. 6 01 Р 3/48, 1966 .(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения флуктуаций скорости вращения электродвигателя | 1984 |
|
SU1150540A1 |
| Устройство диагностирования шарикоподшипников электрической машины | 1983 |
|
SU1107220A1 |
| Устройство контроля подшипников электрической машины | 1982 |
|
SU1035732A1 |
| Устройство для измерения скорости вращения индукторного асинхронного двигателя | 1976 |
|
SU613242A1 |
| Устройство для определения расстройки контура резонансного датчика | 1985 |
|
SU1264110A1 |
| Датчик скорости, направления вращения и углового положения вала | 1988 |
|
SU1654972A1 |
| Устройство для измерения скорости вращения электрической машины постоянного тока | 1986 |
|
SU1530992A1 |
| СПОСОБ КОНТРОЛЯ СИНХРОННОГО ГИРОМОТОРА ГИРОСТАБИЛИЗАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327955C1 |
| Устройство контроля шарикоподшипников электрической машины | 1984 |
|
SU1176419A1 |
| Вентильный электродвигатель | 1979 |
|
SU790079A1 |
