Изобретения относятся к электротехнике и могут быть использованы для контроля вращения синхронного гиромотора, в частности гиростабилизатора.
В различных гироскопических устройствах широко используются синхронные гистерезисные гиромоторы вследствие стабильности их кинетического момента, что необходимо для обеспечения требуемой точности прибора. Основным условием работы такого электродвигателя является состояние синхронизма, при котором частота вращения ротора, а следовательно, и кинетический момент имеют наибольшую стабильность, поэтому необходимо контролировать этот параметр.
Известен способ контроля трехфазного электродвигателя [1], основанный на методе измерения импульсов, величина которых прямопропорциональна потребляемому двигателем току.
Недостатком этого способа, как и реализующего его устройства, является низкая надежность и достоверность контроля вращения электродвигателя.
Известен также способ контроля асинхронного электродвигателя, реализованный в системе контроля асинхронного электродвигателя [2], основанный на отключении электродвигателя от источника питания на короткий промежуток времени, и контроля частоты Э.Д.С, которая индуцируется в обмотке электродвигателя, когда он вращается по инерции (на выбеге).
Недостатком этого способа, как и реализующего его устройства, является отключение на некоторое время двигателя от источника питания, что недопустимо для синхронного электродвигателя, т.к. происходит выход его из синхронизма.
Известен также индикаторный гиростабилизатор [3], в котором используется косвенный способ контроля гиромотора, основанный на анализе погрешности прибора. Иначе говоря, если погрешность прибора в норме, то значит гиромотор работает нормально.
Недостатком такого способа, как и устройства, его реализующего, является низкая надежность и достоверность контроля вращения гиромотора.
Задачей предложенных изобретений является повышение надежности и достоверности контроля синхронного гиромотора гиростабилизатора.
Поставленная задача достигается тем, что в способе контроля синхронного гиромотора гиростабилизатора, заключающемся в измерении частоты вращения ротора гиромотора, согласно изобретению с датчика угла снимают информационный сигнал, демодулируют, выделяют сигнал с частотой, равный половине частоты вращения ротора, сравнивают этот сигнал с эталонным значением, а информацию о результатах сравнения выводят на сигнализатор.
В устройство контроля синхронного гиромотора гиростабилизатора, содержащего гироскоп, соединенные последовательно датчик угла, усилитель, фазочувствительный выпрямитель, согласно изобретению введены соединенные последовательно и подключенные к выходу фазочувствительного выпрямителя полосовой фильтр, компаратор напряжения, сравнивающее устройство, сигнализатор и источник эталонного сигнала, подключенный к входу сравнения сравнивающего устройства. При вращении ротор гиромотора колеблется с частотой в два раза ниже частоты его вращения. Эти колебания снимаются индукционным датчиком угла и преобразуются в амплитудно-фазомодулированный сигнал, частота которого после фазочувствительного выпрямления сравнивается с эталонной частотой и в зависимости от результата сравнения делается вывод о соответствии частоты вращения ротора требуемому значению. Существенным отличием предложенного способа является выделение сигнала с частотой, равной половине частоты вращения ротора гиромотора, сравнение частоты выделенного сигнала с эталонным значением частоты и выведение результатов сравнения на сигнализатор. Т.к. источник эталонного сигнала имеет высокую стабильность и точность формирования эталонной частоты, то при сравнении с ней информационного сигнала достигается высокая достоверность контроля работы синхронного гиромотора.
К существенным отличиям устройства относится введение в него соединенных последовательно и подключенных к выходу фазочувствительного выпрямителя, полосового фильтра, компаратора напряжения, сравнивающего устройства, сигнализатора и источника эталонного сигнала, подключенного к входу сравнения сравнивающего устройства, что позволяет реализовать предложенный способ контроля синхронного гиромотора.
Предложенный способ реализуется следующим образом.
С индукционного датчика угла снимают информационный сигнал, выпрямляют его, выделяют сигнал с частотой, равной половине частоты вращения ротора, сравнивают этот сигнал с эталонным значением частоты, а информацию о результатах сравнения выводят на сигнализатор. Если частота этого сигнала равна эталонной частоте, значит гиромотор работает в режиме синхронизма, в этом случае сигнализатор показывает исправность, если же частота сигнала ниже эталонного значения, значит гиромотор снизил скорость вращения и сигнализатор показывает неисправность. На чертеже представлена структурная схема устройства контроля синхронного гиромотора гиростабилизатора, которое содержит гиростабилизатор 1, гироскоп 2, гиромотор 3, индукционный датчик 4 угла, усилитель 5, фазочувствительный выпрямитель 6, полосовой фильтр 7, компаратор 8 напряжения, сравнивающее устройство 9, сигнализатор 10, источник 11 эталонного сигнала.
В предлагаемом устройстве в состав гиростабилизатора 1 входит гироскоп 2 с гиромотором 3 и индукционным датчиком 4 угла, к которому подключены последовательно соединенные усилитель 5, фазочувствительный выпрямитель 6, полосовой фильтр 7, компаратор 8 напряжения, сравнивающее устройство 9, сигнализатор 10, к входу сравнения сравнивающего устройства 9 подключен источник 11 эталонного сигнала.
Устройство работает следующим образом.
При вращении гироскопа 2 его ротор колеблется с частотой в два раза ниже частоты его вращения и эти колебания в датчике 4 угла преобразуются в амплитудно-фазомодулированный сигнал, который усиливается усилителем 5, выпрямляется фазочувствительным выпрямителем 6 и подается на полосовой фильтр 7. Полосовой фильтр 7 настроен на частоту, равную половине частоты вращения гироскопа 3, и выделяет сигнал с этой частотой. Для нормирования сигнала по амплитуде предусмотрен компаратор 8 напряжения, на выходе которого информационный сигнал имеет форму прямоугольных импульсов. Этот сигнал поступает на вход сравнивающего устройства 9, на вход сравнения которого поступает с источника 11 эталонного сигнала эталонный сигнал с частотой, равной половине частоты вращения гироскопа 2. Как правило, синхронный гиромотор 3 гироскопа 2 питается от статического преобразователя напряжения, задающий генератор которого имеет кварцевую стабилизацию частоты, и в качестве источника 11 эталонного сигнала используется тот же задающий генератор. Если частота с выхода компаратора 8 напряжения равна частоте источника 11 эталонного сигнала, то на выходе сравнивающего устройства 9 будет одно логическое состояние, например «1», это означает, что гиромотор 3 работает в синхронизме.
Если частота с компаратора 8 напряжения ниже частоты источника 11 эталонного сигнала, то будет другое логическое состояние «0», что означает, что гиромотор 3 снизил обороты. Эти логические состояния поступают на сигнализатор 10, который фиксирует состояние гиромотора 3.
Таким образом осуществляется контроль синхронного гиромотора гиростабилизатора.
Предложенный способ контроля синхронного гиромотора и устройство для его осуществления используются в гиростабилизаторах.
Источники информации
1. А.С. СССР 1336896, кл. Н02Н 3/24, 7/09, 1984 г.
2. Патент РФ № 2285237, кл. G01C 25/00, 2004.
3. Патент РФ № 2117915, кл. G01C 19/44, 1998 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Способ определения погрешности двухстепенного гироблока | 2016 |
|
RU2637186C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СИСТЕМА КОНТРОЛЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342638C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| ГИРОСКОП | 2021 |
|
RU2771918C2 |
Изобретения относятся к электротехнике и могут быть использованы для контроля вращения синхронного гиромотора, в частности гиростабилизатора. Устройство содержит гиростабилизатор 1, гироскоп 2, гиромотор 3, индукционный датчик 4 угла, усилитель 5, фазочувствительный выпрямитель 6, полосовой фильтр 7, компаратор 8 напряжения, сравнивающее устройство 9, сигнализатор 10, источник 11 эталонного сигнала. С индукционного датчика 4 угла снимают информационный сигнал, выпрямляют его, выделяют сигнал с частотой, равной половине частоты вращения ротора гиромотора 3, сравнивают этот сигнал с эталонным значением частоты, а информацию о результатах сравнения выводят на сигнализатор 10. Если частота этого сигнала равна эталонной, значит гиромотор 3 работает в режиме синхронизма, в этом случае сигнализатор 10 показывает исправность, если же частота сигнала ниже эталонного значения, значит гиромотор 3 снизил скорость вращения и сигнализатор 10 показывает неисправность. Техническим результатом является повышение надежности и достоверности контроля синхронного гиромотора гиростабилизатора. 2 с.п. ф-лы, 1 ил.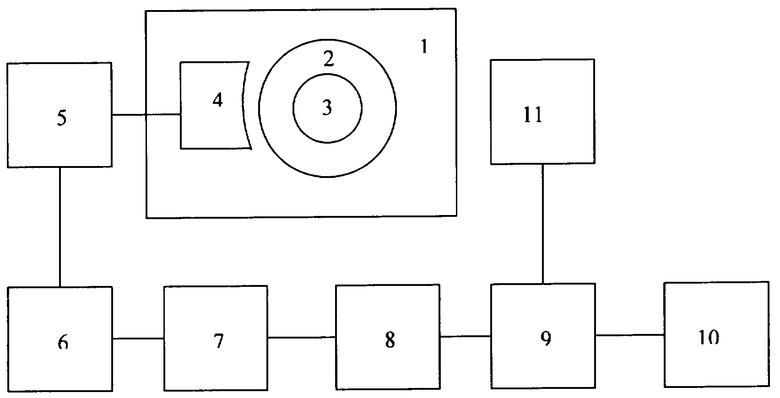
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| СИСТЕМА КОНТРОЛЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2285237C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТРЕХФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1984 |
|
SU1336896A1 |
| 0 |
|
SU154933A1 | |
| US 4267735 А, 19.05.1981 | |||
| Способ оптимизации обкатки двигателей внутреннего сгорания | 1979 |
|
SU1308205A3 |

