Изобретение относится к измерительной технике, в частности к устройствам для измерения давлений.
Известно устройство для измерения полей давления в газотурбинном двигателе, содержащее размещенные во вращающемся диффузоре приемник давления и датчик угла поворота, а также последовательно вк.пюченные датчики давления, подключенные к приемникам давления,ч-согласукхцие устройства. Коммутатор сигиглов датчиков давления, время-импульсный преобразователь, цифровой преобразователь и блок памяти и, кроме того, блок управления коммутатором, подключенный к коммутатору и блоку памяти, пульт управления, подключенный к блоку управления коммутатором, схему управления, подк.шоченну|с к- пульту управления, время-импульсному преобразователю и датчику угла поворота, счетчики номера серии измерения и значеиия параметра, счетчик номера параметра, подключенный к блоку управления коммутаторе, блок индикации и блоки информации и печати, подключенные к схеме управления II.
Однако известное устройство не обеспечивает необходимой точности
и быстродействия контроля полей давления.
Цель изобретения - повышение точ.ности н быстродействия
Поставленная цель достигается тем, что устройство дополнительно содержит сдвигающий регистр, входы которого подключены к счетчика.м номера серии измерения и параметра
10 и счетчику значения параметра, выходы - к блокам индикации, информации и печати, а управляющий вход подключен к схеме управления.
Цифровой преобразователь содержит
15 счетчик, сумматор импульсов, подключенный к счетному входу счетчика и выходу блока памяти, и две группы вентилей, входы которых подключены к выходу счетчика и выходам блока
20 памяти, причем выходы -первой группы вентилей подключены к суь«иатору импульсов, а выходы второй группы к счетчику значения параметра.
Время-импульсный преобразователь
25 дополнительно подключен к счетчику номера параметра.
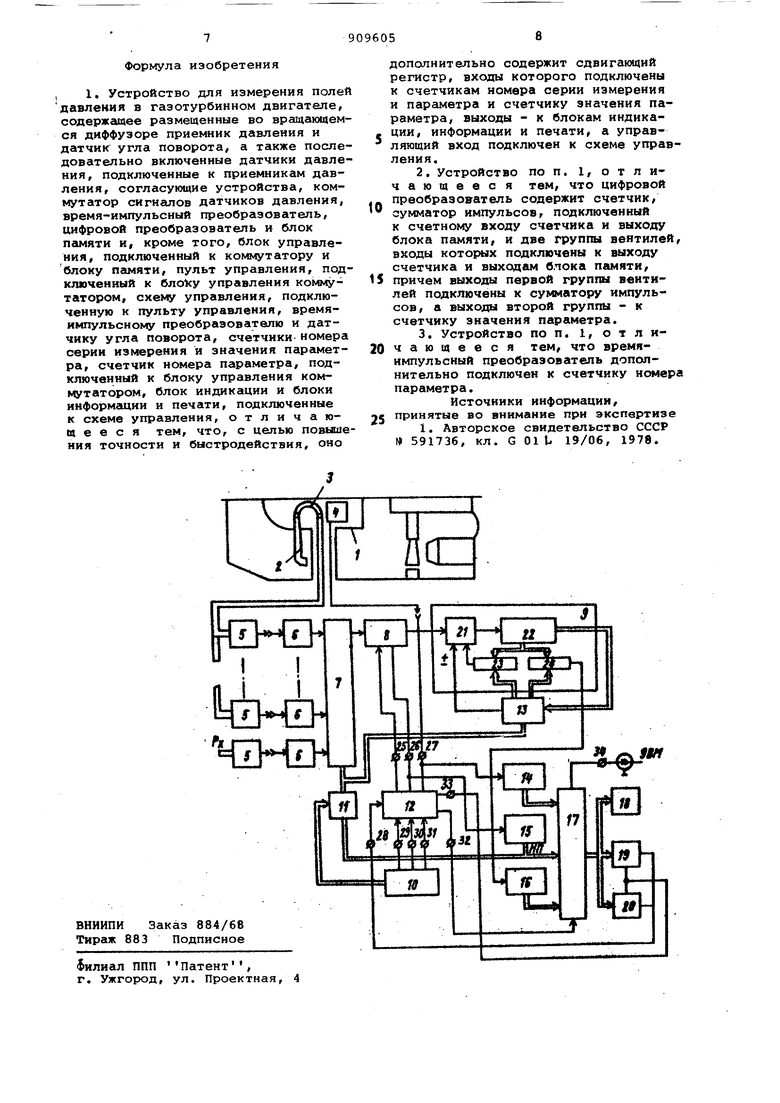
На чертеже представлена блок-схема устройства.
Устройство содержит размещенные
30 во вращающемся диффузоре 1 приемники
2 давления, подключенные к пневмомагистрсшям гибкими элементами 3, датчик 4 угла поворота, датчики 5 давлений, согласующие устройства 6, коммутатор 7 сигналов датчиков, время-импульсный преобразователь 8, цифрбвой преобразователь 9, пульт 10 управления, блок 11 управления коммутатора, схему 12 управления устройством, блок 13 памяти, счетчик 14 номера серии, счетчик 15 номера параметра, счетчик 16 параметра, сдвигающий регистр 17,блок 18 индикации,бло la перфорации, блок 20 печати. Цифровой преобразователь 9 образован сумматором 21 импульсов, счетчиком 22, двумя группами вентилей 23 и 24. Устройство содержит следующие функциональные шины: шину 25 запуска время-импульсного преобразователя, шину 26 сигнала окончания интегрирования входного сигнала, шину 27 сигнала датчика угла поворота, шину 28 окончания регистрации, , 29-31 режимов автономные измерения, автоматические измерения и вывод на ЭВМ, шину 32 сдвига информации, шину 33 запуска блоков регистрации, коаксиальную шину 34 связи с ЭВМ.
Узлы устройства связаны следующим образом.
Входы датчиков 5 через согласующие устройства б подключены ко входам коммутатора 7, управляющие входы которого подключены к выходам блока 11 управления коммутатора. Выход коммутатора 7 соединен со входом времяимпульсного преобразователя 8, пусковой вход которого через шину 25 связан с одним из выходов cxevH 12 управления, выход сигнала конца интегрирования время-импульсного преобразователя 8 через шину 26 связан с одним из входов схемл 12 управления и со входом счетчиха 15 номера параметра, а выход подключен через вход цифрового преобразователя 9 к первому счетному входу счетчлка 22, выходами связанного с первыми входами вентилей 23 и 24, вторые входы которых подключены к выходам блока 13 памяти, а выходы вентилей 23 и 24 соединены со вторым счетным входом сумматора 21 импульсов и с выходом преобразователя 9. Один из выходов блока 13 памяти соединен со знаковым входом сумматора 21 импульсов, а входы подключены к выходам блока 11 управления коммутатором, входы KOTOpojo связаны с шинами пульта 10 управления и с выходс1ми счетчика 15 номера парс1метра.
Выход датчика 4 угла поворота через шину 27 связан с одним из входов схемы 12 управления и со входом счетчика 14 номера серии. Выход циф-рового преобразователя 9 соединен
со входом счетчика 16 параметра. Выходы счетчиков 14-16 соединены со входами сдвигающего регистра 17, выходы которого подключены к приемным входам блоков 18-20 индикации, перфорации и печати. Вход сдвигающего регистра 17 соединен через шину 32 с одним из выходов схекы 12 управления, а выход - с коаксиальной шиной 34 связи с ЭВМ. Выходы готовности блоков 19 и 20 перфорации и печати через шину 28 связаны со входом схемл 12 управления, один из выходов которой через шину 33 запуска блоков регистрации связан с управляющими входами последних.
Кроме того, вход одного из датчиков 5 давления, например последнего, подключен к калибровочному задатчику давления (не показан). выходы старших разрядов счетчика 22 соединены со входами блока 13 памяти.
Устройство в автоматическом режиме работает следукяцим образом.
Приемники 2 давления разной высоты, установленные на вращающемся диффузоре 1, осуществляют сканирование поля давления за один оборот диффузора 1, который возвращается в исходное состояние в течение следующего измерения. С помощью датчика 4 угла поворота осуществляется подача команды на начало серии измерений, в течение которой осуществляется опрос всех датчиков 5. Интервалы между сериями зависят от технологических требований.
в автономном режиме начгшо серии измерений осуществляется оператором по команде с пульта 10 управления, как и вращение диффузора 1.
Серия измерений с помощью предлагаемого устройства осуществляется следующим образом.
По команде запуска время-импульсного преобразователя 8, подаваемой по шине 25, осуществляется интегрирование выходного напряжения первого датчика 5 давления, после окончания которого вход время-импульсного преобразователя S отключается от выхода коммутатора 7 и осуществляется деинтегрирование напряжения от эталонного источника напряжения. Сигнал об окончании времени интегрирования через шину 26 поступает на вход cxe№J 12 управления и на вход счетчика 15 номера параметра, подготавливая устройство к регистрации результатов измерения сигнеша первого датчика 5, а также переключая коммутатор 7 на следующий датчик 5 давления.
Переключение на следующий датчик осуществляется не по окончании общего цикла время-импульсного преобразователя 8, как в известных устройствах, а раньше, чем достигается некоторый выигрыш во времени, который становится весьма существенным к концу серии измерений и, аам боле к концу сканирования поля давлений За счет более раннего переключения на следующий датчик 5 происхо дит более полное установление переходных процессов в целях коммутатор 7 и время-импульсного преобразовате ля 8. По окончании полного цикла преобразования иа вход цифрового преобразсвателя 9 поступает число импульсов, соответствующее выходному напряжению датчика 5, а на вход сче чика 16 - откорректированное и отмасштабированное число импульсов, равное измеряемому давлению. После этого по шине 33 осуществляется пуск блоков 19 и 20 регистр ции, осуществляющих регистрацию в очередном кадре номера серии, номер парг1метра и значения параметра. Одновременно осуществляется очередной запуск время-импульсного преобразователя 8, а при поступлении по шине 28 сигнала готовности блоков 19 и 20 регистрации устройство осуществляет следующий цикл регистрации измерения. В предлагаемом устройстве коррекция нелинейности и масштабирование результатов измерения осуществляется одновременно и в одном устройстве - цифровом преобразователе 9 следующим образом. В течение цикл измерения одного датчика код числа на управляющих входах вентилей 23 фиксируется неизменным, как и сигна на знаковом входе сумматора 21 импульсов, который Зависит от типа датчика и его диапазона« В предлагаемом устройстве cyiyB aTOp 21 импульсов фиксируется в режиме сложения (при смене датчиков 5 возможен и режим вычитания), в результате чего число импульсов, поступающее на вход счетчика 22 равно Nil И, (1) где N - число имп/льсов на входе преобразователя 9; - число импульсов на выходе вентилей 23. С учетом того, что где К. - кдд масштабирования на вхо дах вентилей 23, Kjri NBX + N ( 22. Откуда 21 бХ ( 2 И - т.е. масштабирование осуществляется с дробными коэффициентами, определяемыми разбросом характеристик дат чиков. Нелинейности отдельных характеристик корректируются при поступлении кодов с выходов старших разрядов счетчика 22 на вторые входы блока 13 памяти., в результате чего на управляющие входы вентилей 24 подаются коды угловых коэффициентов отдельных звеньев корректирующей функции, а с выходов вентилей 24 поступает число импульсов, равное . Л 2 К, : 2 - KJ 2 ВХ ВХ 2 - К г и пропорциональное измеряемому параметру. Цикл измерения в устройстве осуществляется следующим образом. По достижении вращающимся диффузором заданного углового положения, при котором предусмотрено сканирование поля давлений в радиальном направлении, с выхода датчика 4 угла по шине 27 поступает сигнал, в результате чего в счетчике 14 формируется номер очередной серии измерений, а схема 12 управления выдает сигналпо шине 25 на запуск время-импульсного преобразователя 8. По окончании времени интегрирования сигнала датчика по шине с выхода узла поступает сигнал, в результате чего в счетчике 15 фиксируется код номера измеряемого параметра (номер датчика), что приводит к переключению коммутатора 7 на следующий датчик, а также в схеме 12 управления осуществляется формирование команды, которая подается по окончании второго такта работы преобразователя 9 и накоплении цифрового кода измеряемого параметра в счетчике 16, на шине 33, благодаря чему в блоках 19 и 20 осуществляется регистрация информации с регистра 17, по окончании которой сигнал окончания регистрации по шине 28 подается на схему 12 управления. После чего повторяется описанный цикл измерения второго и далее датчиков. В течение одной серии измерений осущест Езляется опрос всех датчиков 5. При кзобходимости предлагаемое устройство реализует режим вывода информации на ЭВМ, для чего после окончания измерения на шкну 32 подаются сдвиговые импульсы, число которых равно числу разрядов регистра 17, в результате чего с выхода регистра 17 информация поступает на ину 34 последовательным кодом. Таким образом, устройство позвояет повысить точность и быстродействие за счет введения линеаризатора, овмещающего функции масштабирования коррекции, а также за счет провеения подготовительных операций посе цикла интегрирования время-импульного преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой кодирующий преобразователь частоты следования импульсов | 1980 |
|
SU919080A1 |
| Устройство для сбора и первичной обработки информации датчиков | 1976 |
|
SU643894A1 |
| Установка для измерения весового расхода топлива | 1984 |
|
SU1191747A1 |
| Устройство для сопряжения с датчиками | 1984 |
|
SU1226474A2 |
| Устройство для сопряжения с датчиками | 1983 |
|
SU1137473A1 |
| Устройство для автоматической обработки сигналов частотных первичных преобразователей | 1980 |
|
SU918874A1 |
| Цифровой кодирующий преобразователь частоты | 1980 |
|
SU924857A1 |
| Устройство для считывания графической информации | 1981 |
|
SU966711A1 |
| Устройство для измерения параметров частотных датчиков | 1989 |
|
SU1705757A1 |
| Многоканальное устройство для обработки хроматографических сигналов | 1988 |
|
SU1608638A1 |
