(54) ЭЛЕКТРОННАЯ СИСТЕМА ЗАЖИГАНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ
1
Изобретение относится к электрооборудованию двигателей внутреннего сгорания, а именно к системе электронного зажигания топливно-воздушной смеси, впрыскиваемой в цилиндры двигателя.
Известны классические системы зажигания, содержащие механический высоковольтный распределитель, вал которого связан с валом двигателя. В корпусе распределителя размещаются кон- .10 причем
такты прерывателя, к которым подключена первичная обмотка катущки зажигания, и механические автоматы опережения зажигания: центробежный и вакуумный регуляторы. Выход вторичной обмотки катушки зажигания1Й подключен к центральному электроду крышки высоковольтного распределителя. К искровым свечам подсоединены боковые электроды крышки распределителя 1.
Однако механическим прерывателям свой- 20 ственны обгорание контактов, образование паразитных пленок, инерция, собственно вибрация и переходные колебания. В распределителях высокого напряжения имеют место обгорание и, кроме того, высокая чувствительность к 25
атмосферным условиям. Подвержены износам и автоматы угла опережения зажигания.
Известна электронная система зажигания, электронный блок которой построен на элементах логики, на входы которой заведены сигналы датчика скорости вращения вала двигателя, температуры двигателя и т.д. Система содержит два датчика, размещенных, например, в корпусе высоковольтного распределителя.
мертвой точки порщня, а другой смещен на максимальный угол опережения зажигания. Электронный блок снабжен двумя входами, один обеспечивает управление системой на пусковых и холостых оборотах двигателя, а другой - на нормальном рабочем режиме 2.
Однако работа известной системы зажигания при различных режимах работы двигателя недостаточно точна, а средства, используемые для реализации такой системы, весьма дорогостоящие.
Цель изобретения - повышение точности момента зажигания.
Поставленная цель достигается тем, что в электронной системе зажигания для двигагеодин фиксирует положение верхней
39
лей внутреннего сгорания с четным числом С цилиндров, содержащей преобразователь давлекия и преобразователь положения поршней двигателя, которые подключены ко входам блока автоматического опережения зажигания, последовательно соединенного с электронным распределителем и искровыми генераторами, связанными со свечами зажигания, причем преобразователь положения поршней двигателя образован металлическими сегментами, имеющими разную длину и равномерно расположенными ПО окружности диска, связанного,
например, с распределительным валом и двум неподвижными детекторами, диск снабжен С/2 парами сегментов, причем длина дуги одной пары в два раза больше другой, выходы детекторов преобразователя положения поршней двигателя подключены ко входам двух каналов блока автоматического опережения зажигания и двум входам электронного распределителя, выход преобразователя давления подключен к третьему входу блока автоматического опережения зажигания, а его выход подсоединен к третьему входу электронного распределителя.
Выход блока автоматического опережения зажигания подключен к одному входу бистабильного триггера электронного распределителя непосредственно, а выходы детекторов преобразователя положения поршней двигателя подсоединены ко второму входу через последовательно включенные логический элемент И, фильтр верхних частот и полярный селектор, причем выход бистабильного триггера подключен к одним входам двух логических элементов И, к другим входам которых подсоединены выход блока автоматического опережения зажигания.
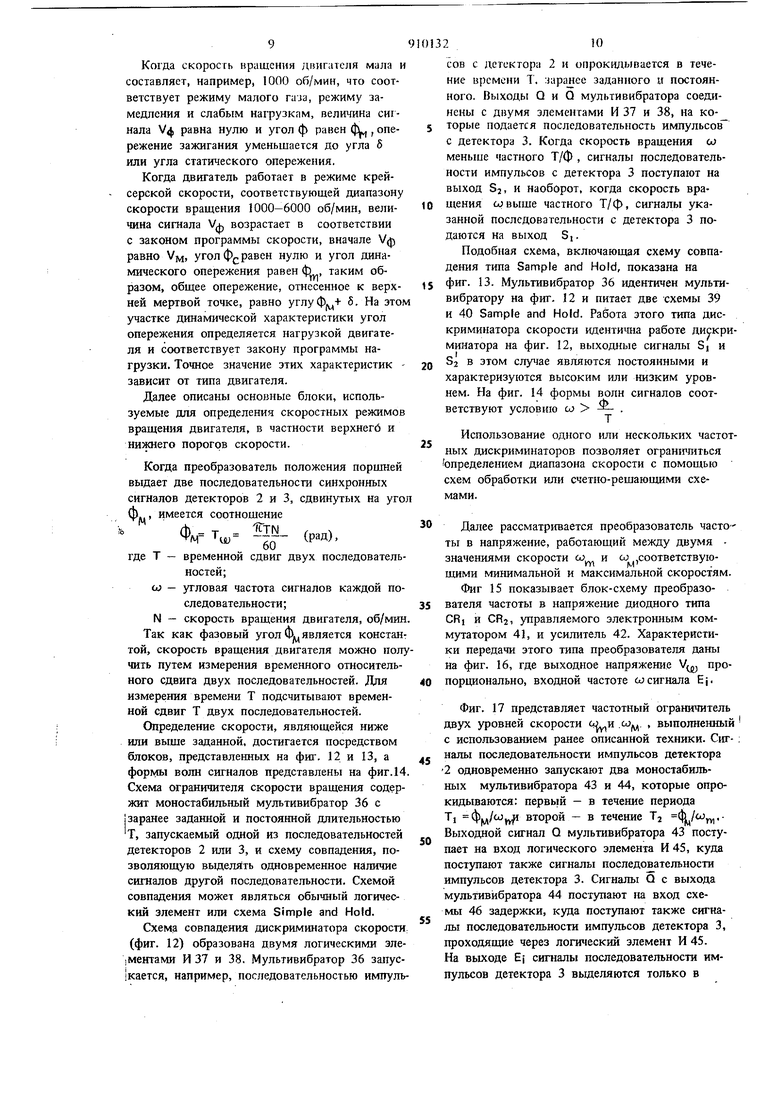
На фиг. 1 изображена блок-схема предлагамой системы зажигания (для двигателя с четырьмя цилиндрами); на фиг. 2-4-преобразователь положения хода поршней и формы волн соответствующих сигналов; на фиг. 5 и. 6 - то же, вариант исполнения; на фиг. 7 и 8 - схема электронного распределителя и 1формы волн соответствующих сигналов; на 1ФИГ. 9-11 - схема блока автоматического опережения зажигания и формы волн соответствующих сигналов; на фиг. 12-14 - блоксхема дискриминатора скорости и формы волн соответствующих сигналов; на фиг. 15- 18 - частотный ограничитель двух уровней скорости; на фиг. 19 и 20 - схема блока, устраняющая изменение угла опережения.
Система зажигания содержит (фиг. 1) преоразователь 1 положения поршней двигателя, выдающий на выходах двух детекторов 2 и 3 синхронные электрические сигналы, сдвинутые на угол Фп; эти сигналы дают ин|формацию о положении поршней, скорости вращения двигателя и фазе цикла зажигания; преобразователь 4 давления, выдаюпщй электрический сигнал VP нагрузки двигателя и размещаемый на всасывающем трубопроводе; блок 5 автоматического опережения зажигания. Этот блок питается выходными сигналами преобразователей 1,4 и позволяет автоматически изменять момент зажигания двигателя в зависимости от измеренных параметров состояния - скорости вращения и нагрузки двигателя, а также других параметров, например температуры выхлопных газов и т. п., могущих влиять на оптимизацию момента за-
жигания и считываемых соответствующими преобразователями (не показаны). Блок 5 выдает на своем выходе импульсные сигналы, соответствующие требуемому моменту зажигания.
Система содержит также электронный распределитель 6 сигналов запуска Р искровых генераторов 7 и 8, запитываемый от выходных сигналов преобразователя 1 положения поршня и последовательно, циклически распределяющий на своих двух выходах запускающие сигналы Р, вырабатываемые блоком 5 автоматического опережения зажигания; генераторный блок 9, содержащий два искровых генератора 7 и 8 электронных воспламенителя цилиндров 7-1 и 7-2), выдающих высоковольтные электрические импульсы. Это известные искровые генераторы симметричного типа с двумя выходами, питающие одновременно группы из двух цилиндров; принятая последовательность (7-Г, 8-2, 7-2, 8-1) воспламенения цилиндров может быть иной и определяется различными конструкциями двигателей.
Режимы работы двигателя внутреннего сгорания разнообразны и, в частности, включают: режим запуска, характеризующийся весьма низкой скоростью вращения порядка 50 об/мин и большими колебаниями электропитателя, напряжение которого может быть равным половине напряжения бортового аккумулятора; режим малого газа при слабой нагрузке, верхний предел которого составляет 1000- 1500 об/мин; режим крейсерской скорости при изменяющейся нагрузке и верхнем пределе скорости 5000-6000 об/мин; режим заброса оборотов двигателя (с нагрузкой или без), скорость которого ниже опасной для двигателя.
Далее описаны средства, позволяющие определять различные режимы работы двигателя и соответственно оптимально регулировать мо- мент зажигания двигателя и исключать заброс оборотов двигателя.
На фиг. 2 представлены элементы преобразователя положения поршней; на фнг. 3 формы волн сигналов на двух выходах этого преобразователя. При этом предполагается, что преобразователь 1 положения поршней сочленен с кулачковым валом, скорость вращения которого равна половине скорости вращения коленчатого вала.
Преобразователь 1 положения поршней (фиг. 2) содержит диск, сочлененный с кулачковым валом двигателя и снабженный четырьмя металлическими сегментами 10-13, и пару близко и неподвижно установленных Hd корпусе двигателя детекторов 2 и 3, определяющих прохождение металлических сегментов. Детекторы разнесены на заранее заданный и постоянный угол ф, равный по меньшей
мере, половине угла динамического опережения зажигания. Металлические сегменты развесены по окружности на угол 90 . Сегменты Д и 11 занимают дугу с углом а, большим угла (JV),, а диаметрально расположенные сегменты 12 и 13 - дугу с углом |8, меньшим угла Ф, например для угла Фм 20° углы аи /3 соответственно равны 24° и 16°. Сигналы открывания а частично перекрыва ются (фиг. 3), а сигналы открывания / разоб щены. Цикл двигателя, соответствующий воспламенению всех цилиндров, перекрывается полным оборотом диска на 360°. Положение i верхней мертвой точки поршня точно соответ ствует положению детектора 3 и угловому отклонению 5, соответствующему начальному углу опережения зажигания. Этот угол может быть изменен, если детекторы 2 и 3 устанавливают на детали, слегка перемещаемой относительно ротора, или же, если детекторы установлены неподвижно, тогда слегка смещают диск на оси вращения двигателя. Величина угла 5 может быть отрицательной или положительной в зависимости от типа двигате ля. Детекторы 2 и 3 используются предпочтительно регенеративного типа с переменным затуханием, причем затухание обеспечивается металлическими проводящими секторами. Детектор содержит (фиг. 4) катушку индуктивности L, настроенную конденсатором С на частоту порядка 2-10 МГц, этот LC-контур включен на вход транзисторного генератора 14, работающего в генераторном режиме. Про хождение диска (с проводящими или непроводящими переменными секторами) около катущки индуктивности L вызывает вследствие появления токов Фуко затухание колебаний и, следовательно, амплитудную модуляцию колебаний транзистора. Выходной сигнал транзисторного генератора 14 детектируется демодулятором 15, огибающие сигналы подэются на компаратор 16 уровня, пропускающий наиболее высокий уровень при прохождении металлического сегмента около катушки индуктивности L и самый низкий уровень непроводящих секторов. Такие детекторы положения щироко распространены и выполняются в виде интегральных схем. Различные модификации диска позволяют использовать элек тронно-оптические датчики или датчики Холла,
которые также вырабатывают выходные сигналы аналогичного назначения.
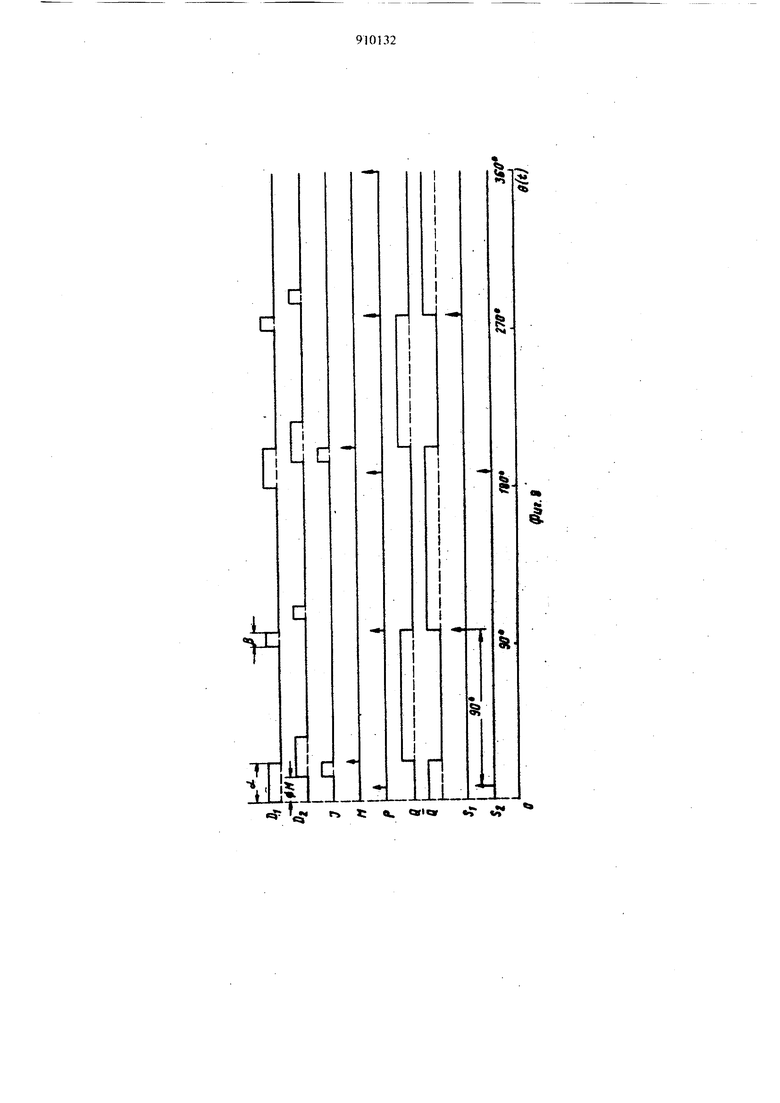
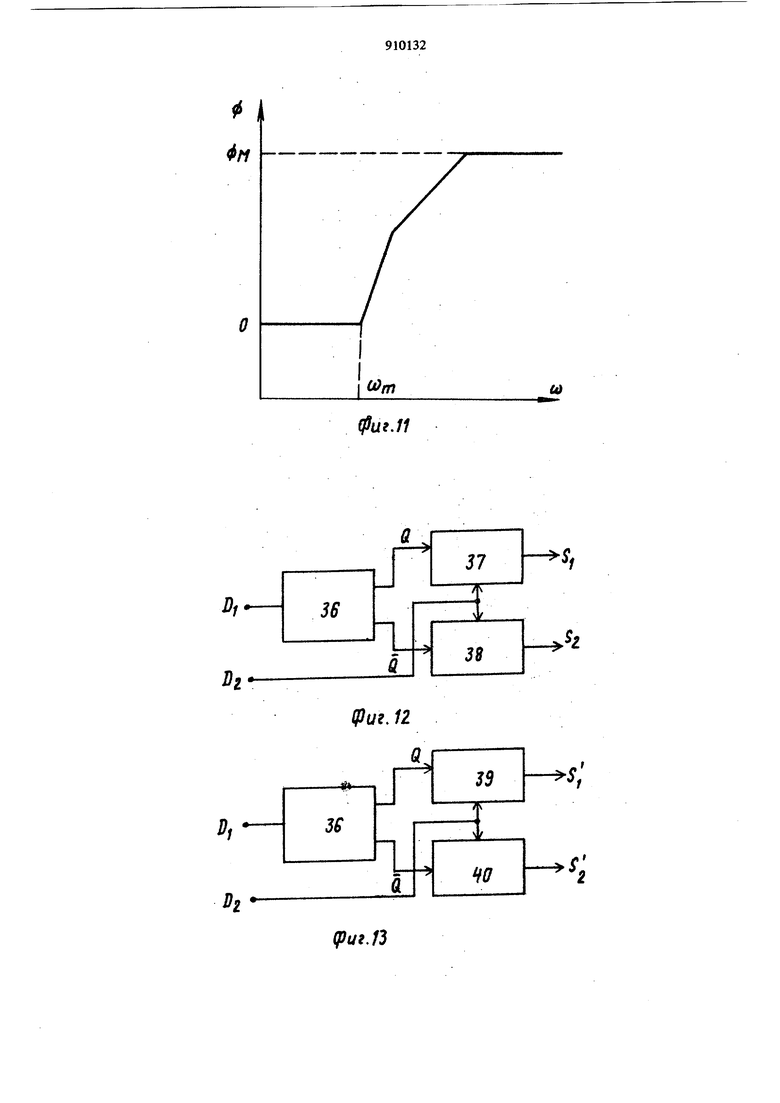
Вышеописанный преобразователь положения поршней предназначен для установки на кулачковом валу двигателя. Аналогичные результаты можно получить с помощью преобразователя, показанного на фиг. 5 и установленного на коленчатом валу двигателя. В соответствии с этим вариантом диск имеет два металлических сегмента 10 и 11, разнесен Длина дуги металлических сегментов соответственно составляет 2а и 2j3 и угол, разделяющий детекторы 2 и 3, равен 2 . В этом случае (фиг. 6), цикл двигателя равен двум полным оборотам коленчатого вала, соответствующим 720° оборота диска. Такое выполнение преобразователя позволяет упростить его монтаж и конструкцию, металлические сегменты в этом случае достаточно расположить на маховике коленчатого вала. Электронный распределитель 6 позволяет последовательно и циклически распределять сигналы запуска генераторов 7 и 8. Блоксхема электронного распределителя 6 представлена на фиг. 7, а формы волн сигналов, вырабатываемых различными цепями - на фиг. 8. Электронный распределитель 6 содержит логический элемент И 17, на два входа которого подаются сигналы от детекторов 2 и 3, вырабатываемые преобразователем положения поршней, причем этот элемент вьщает сигналы 3, угловая длительность которых равна а-Фм. а период повторения равен двойно му периоду повторения последовательных сигналов детекторов 2 и 3. Сигналы 3 разделяются фильтром 18 верхних 4a.TJT и подаются на дифференциальный усилитель, задерживающий импульсы, соответствующие заднему фронту сигнала 3. Полярный селектор 19 выдает импульсный сигнал М, поступающий на вход бистабильного триггера 20, на другой вход которого подается сигнал Р, вырабатываемый блоком 5 автоматического опережения зажигания. Этот импульсный cin-нал Р, частота повторения которого равна частоте следования сигнала детекторов 2 и 3, по фазе расположен между передними фронтами сигналов детекторов 2 и 3 и представляет собой сигнал запуска искровых генераторов 7 и 8. Бистабильный триггер 20 вырабатывает дополнительные еледящие импульсы Q и Q, поступающие на два логических элемента И 21 и 22, на другие вх ды которых подаются сигналы запуска Р. Выходные сигналы Si и $2 логических элементов И 21 и 22 поступают на искровые генераторы 7 и 8. Угловое расстояние между сигналами Si и Sj составляет 180°, а угловое сме щение между двумя последовательностями равно 90°, так как искровые генераторы одно временно питают два цилиндра двигателя. Блок 5 (фиг. 9) автоматического опережения зажигания запускает искровые генераторы обеспечиваюище воспламенение топливнрй сме си, впрыскиваемой в цилиндры двигателя. На фиг. 10 показаны формы волн соответствующих сигналов различных цепей. Сигналы для ясности растянуты таким образом, что показана только четверть или 90° цикла зажигания, так как формы волн полного цикла зажигания двигателя повторяются. Блок 5 автоматического опережения зажигания содержит две основные раздельные части: с одной стороны, цепи 23 считывания ко манд опережение-замедление V зажигания в функции от параметров состояния двигателя, и с другой стороны, цепи 24 преобразования команд Уф в зависимости от момента или точки воспламенения цилиндров двигателя. Цепи 24 питаются сигналами детекторов 2 и 3, выдаваемыми преобразователем положения поршней, и одновременно сигналами команд опережения-замедления Уф, вырабатываемыми считывающими цепями 23. Последовательности сигналов детекторов 2 и 3 синхронны скорости вращения двигателя и их углово смещение равно углу фд соответствующему динамическому изменению фазы зажигания. Фаза сигнала детектора 2 опережает верхнюю мертвую точку на величину Ф,+ S, а фаза си нала детектора 3 - на величину б, где S - угол статического опережения (начальный угол опережения), неизменный и заранее заданный для определенного типа двигателя и достигается механическим смещением преобразователя 1 положения хода поршней. Частота следования импульсных сигналов детекторов 2 и 3 пропорциональна скорости вращения двигате ля. Эти сигналы сначала подаются на две диф ференциальные цепи 23 и 24, которые позвол ют вьщелить передний фронт этих сигналов. Цепь 25 вьщает сигнал Э , а цепь 26 - сигнал К. Сигнал 3 поступает на преобразователь 27 частоты в напряжение, вырабатывающий по стоянный сигнал V ц, пропорциональный скорости вращения двигателя. Сигнал Vcj с выхода преобразователя 27 .подается на один из входов генератора 28 , треугольных импульсов; на друтой вход генератора 28 поступает сигнал с бистабильного триггера 29, запускаемого сигналами Э и определяющего начало треугольного импульса. Такой порядок позволяет после считывания сигналов управления и постоянных времени цепей вырабатывать треугольный сигнал, крутизна которого зависит от скорости вращения двигателя и мгновенное значение амплитуды которого определяет фазу или поаожение поршней. Выходной треугольный сигнал Н генератора 28 сравнивается с сигналом команды опережение-замедление Уф в компараторе 30 уровней; когда величины обоих сигналов совпадают, компаратор 30 вьщает импульсный сигнал РО. Сигналы РО и К поступают на вход логического элемента ИЛИ 31, выходной сигнал которого поступает на вход RZ (сброс на нуль) бистабильного триггера 29. Следящий импульс F триггера 29 возвращается на первоначальный уровень, и генератор 28 также возвращается на первоначальный уровень XJvj, Сигнал F триггера 29 подается на моностабильный мультивибратор 32, который во. время перехода перед сигналом F вьщает импульс Р. Таким образом, импульс Р является следствием перехода сигнала К без сдвига фаз или перехода сигнала Э со сдвигом фаз ф.,в соответствии с командой опережениезамедление Уф. На втором.выходе моностабильного триггера 32 получают сигнал Р, дополнительный к сигналу Р, это относится также к триггеру 29, где получают сигнал Р, дополнительный к сигналу F. Цепи 23 вырабатывают команду опережениезамедление в функции от скорости вращения и нагрузки двигателя. Скорость вращения двигателя в виде выходного сигнала Уц преобразователя 27 поступает в схему 33 программы опережения в функции от скорости закон этой программы устанавливается экспериментально и на практике аппроксимируется прямыми отрезками (фиг. 11). Схема, вырабатывающая такие функции, содержит известный усилитель, совмещенный с диодным полем. Кроме того, закон опережения в функции от нагрузки двигателя определяется эмпирическим путем; сигнал Ур , характеризующий нагрузку двигателя, поступает на вход схемы 34 программь опережения в фуякщш от нагрузки, причем эта программа вырабатывается усилителем, совмещенным с диодным полем. Сумматор 35 осуществляет уравновещивающее суммирование сигналов выхода схем 33, 34 и вьщает управляющие команды опережение-замедление . Блок 5 автоматического опережения зажигания работает следующим образом.
Когда скорость нращения двигателя мала и составляет, например, 1000 об/мин, что соответствует режиму малого гаиа, режиму замедления и слабым нагрузкам, величина сигнала равна нулю и угол ф равен ф , опережение зажигания уменьшается до угла б или угла статического опережения.
Когда двигатель работает в режиме крейсерской скорости, соответствующей диапазону скорости вращения 1000-6000 об/мин, величина сигнала Уф возрастает в соответствии с законом программы скорости, вначале Уф равно VM, угол Ф, равен нулю и угол динамического опережения равен ф , таким образом, общее опережение, отнесенное к верхней мертвой точке, равно углуф(+ 5. На этом участке динамической характеристики угол опережения определяется нагрузкой двигателя и соответствует закону программы нагрузки. Точное значение этих характеристик зависит от типа двигателя.
Далее описаны основные блоки, используемые для определения скоростных режимов вращения двигателя, в частности верхнегб и нижнего порогов скорости.
Когда преобразователь положения порщней выдает две последовательности синхронных сигналов детекторов 2 и 3, сдвинутых на уго ф.у, имеется соотношение
™- (рад),
60
где Т
временной сдвиг двух последовательностей;
со - угловая частота сигналов каждой последовательности;N - скорость вращения двигателя, об/мин
Так как фазовый угол чХ,является констан: той, скорость вращения двигателя можно получить путем измерения временного относительного сдвига двух последовательностей. Для измерения времени Т подсчитывают временной сдвиг Т двух последовательностей.
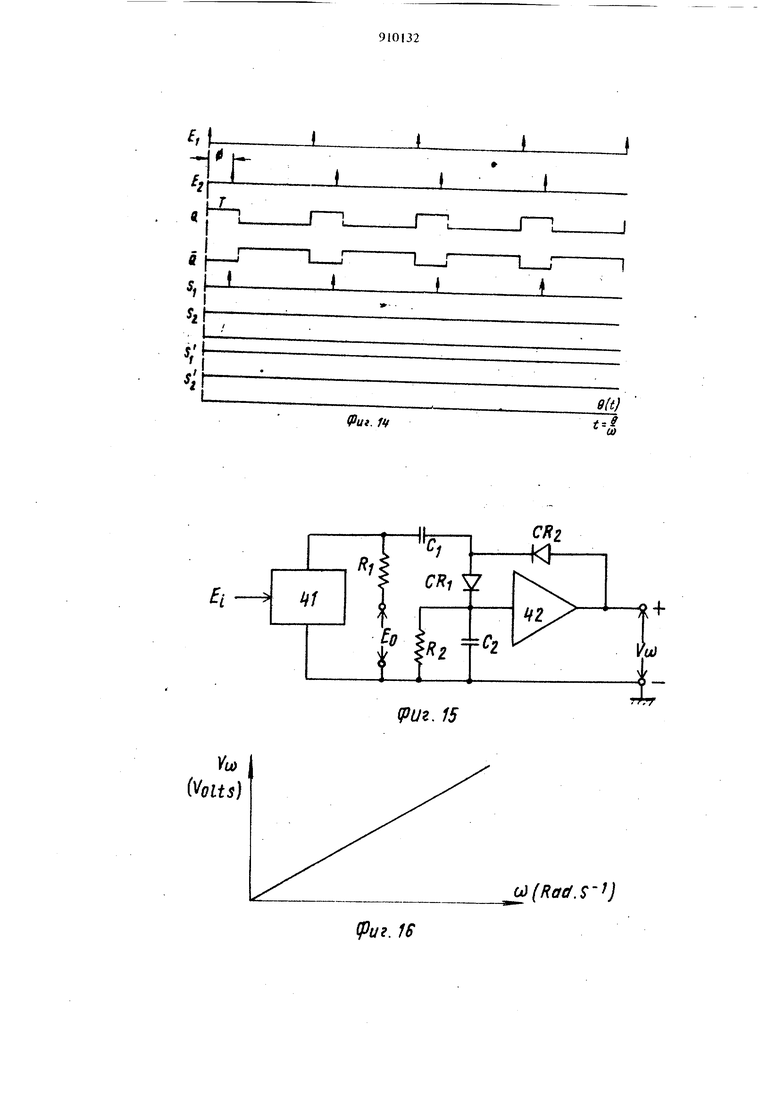
Определение скорости, являющейся ниже или выше заданной, достигается посредством блоков, представленных на фиг. 12 и 13, а формы волн сигналов представлены на фиг. 14 Схема ограничителя скорости вращения содержит моностабильный мультивибратор 36 с заранее заданной и постоянной длительностью Т, запускаемый одной из последовательностей детекторов 2 или 3, и схему совпадения, позволяющую вьщелять одновременное наличие сигналов другой последовательности. Схемой совпадения может являться обычный логический элемент или схема Simple and Hold.
Схема совпадения дискриминатора скорости (фиг. 12) образована двумя логическими эле.ментами И 37 и 38. Мультивибратор 36 занус|кается, например, последовательностью имттульсов с детектора 2 и опрокидывается в течение времени Т. :)аранее заданного ц постоянного. Выходы Q и Q мультивибратора соединены с двумя элементами И 37 и 38, на ко- торые подается последовательность импульсов с детектора 3. Когда скорость вращения w меньше частного Т/ф , сигналы последовательности импульсов с детектора 3 поступают на выход Sj, и наоборот, когда скорость вращения О)выше частного Т/ф, сигналы укаoзанной последовательности с детектора 3 подаются на выход Sj.
Подобная схема, включающая схему совпадения типа Sample and Hold, показана на 5 фиг. 13. Мультивибратор 36 идентичен мультивибратору на фиг. 12 и питает две схемы 39 и 40 Sample and Hold. Работа этого типа дискриминатора скорости идентищш работе дискриминатора на фиг. 12, выходные сигналы Sj и S2 в этом случае являются постоянными и
0 характеризуются высоким или низким уровнем. На фиг. 14 формы волн сигналов соответствуют условию W - .
Использование одного или нескольких частот5
ных дискриминаторов позволяет ограничиться определением диапазона скорости с помощью схем обработки или счетно-решающими схемами.
0
Далее рассматривается преобразователь часто ты в напряжение, работающий между двумя значениями скорости ш и со соответствующими минимальной и максимальной скоростям.
Фиг 15 показывает блок-схему преобразователя частоты в напряжение диодного типа
5 CRi и CR2, управляемого электронным коммутатором 41, и усилитель 42. Характеристики передачи этого типа преобразователя даны на фиг. 16, где выходное напряжение пропорционально, входной частоте cj сигнала Ej.
0
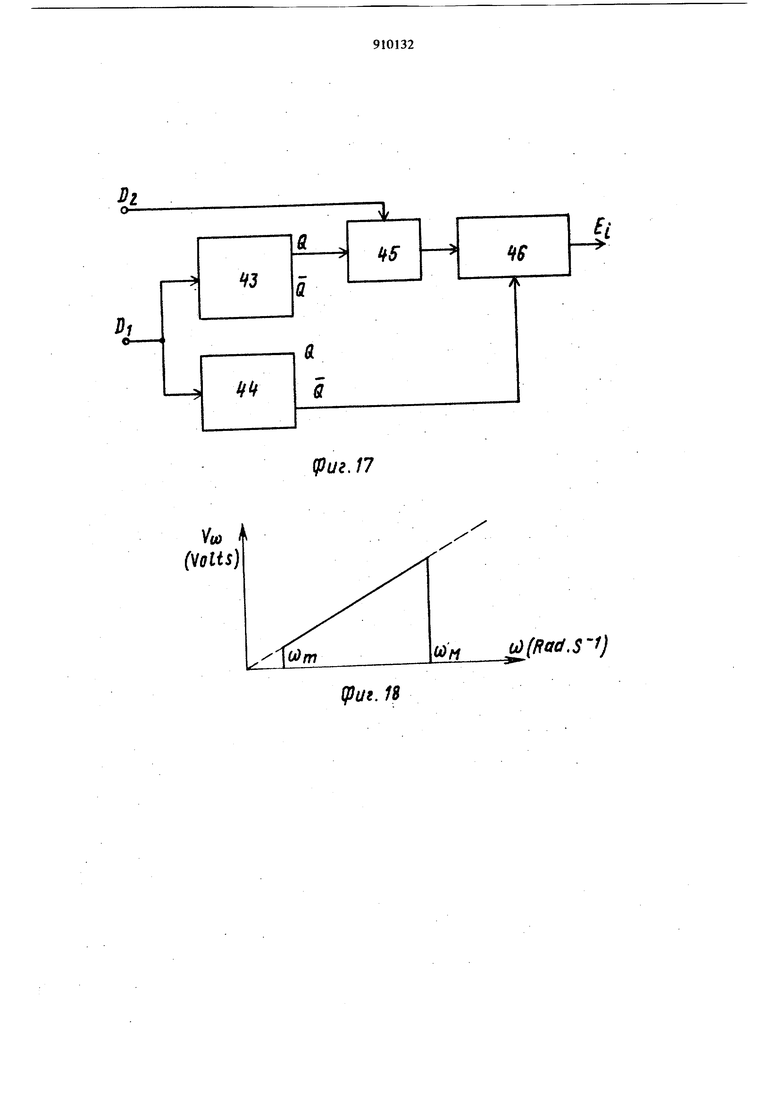
Фиг. 17 представляет частотный ограничитель двух уровней скорости .w. , выполненный с использованием ранее описанной техники. Сиг- : налы последовательности импульсов детектора
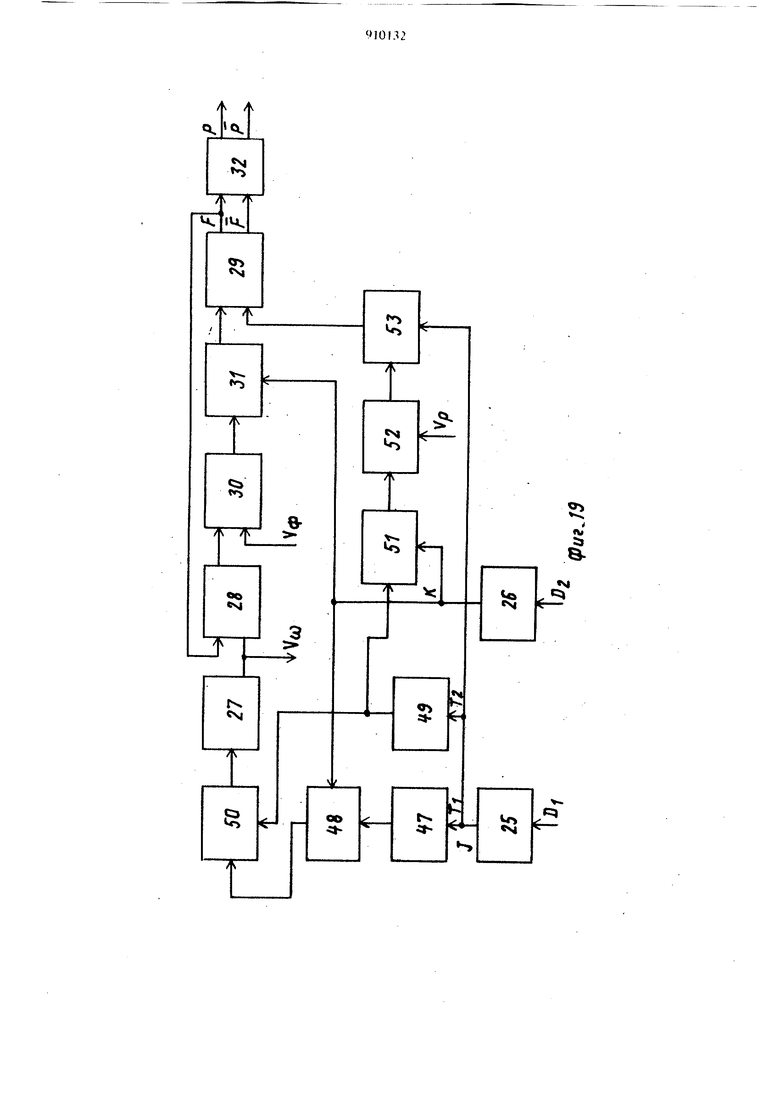
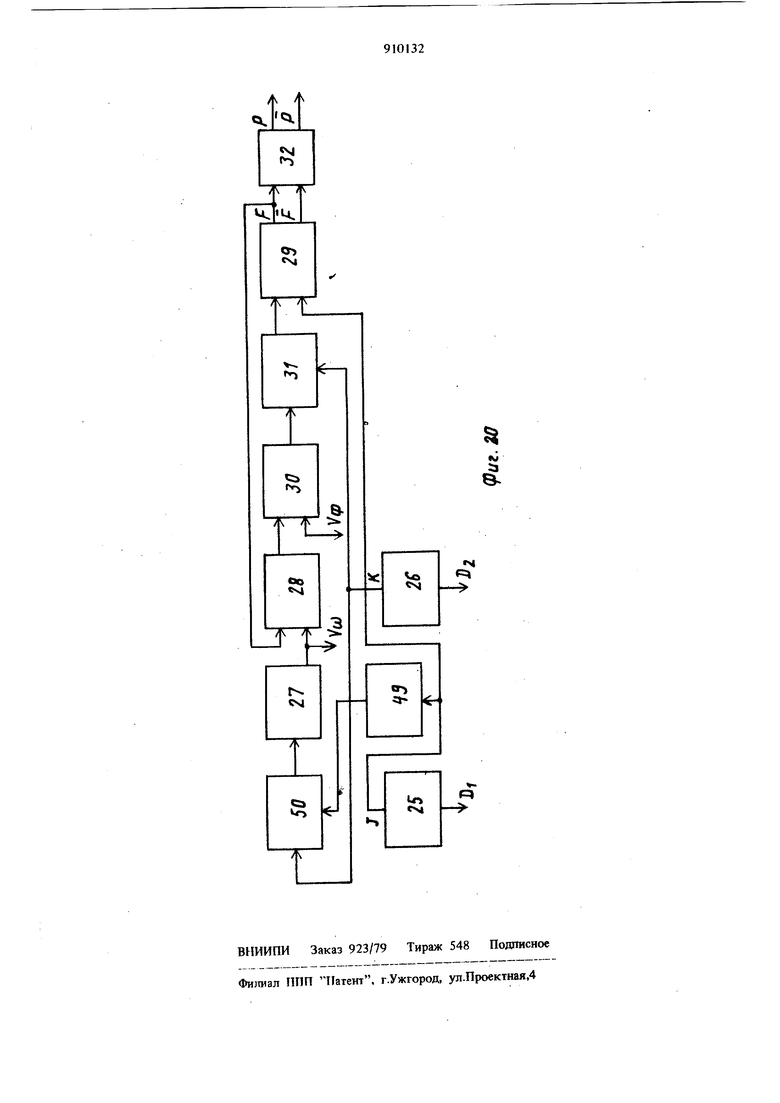
5 2 одновременно запускают два моностабильных мультивибратора 43 и 44, которые опрокидываются: первьш - в течение периода TI ф1д/ 4/р второй - в течение Т, /ш,Выходной сигнал Q мультивибратора 43 посту0пает на вход логического элемента И 45, куда поступают также сигналы последовательности импульсов детектора 3. Сигналы Q с выхода мультивибратора 44 поступают 1И вход схемы 46 задержки, куда, поступают также сигна5лы последовательности импульсов детектора 3, проходящие через логический элемент И 45. На выходе Ej сигналы последовательности импульсов детектора 3 вьщеляются только в том случае, когда частота сигналов находится между значениями , и w, Если совместить дискриминатор скорости (фиг. 17) и преобразователь частоты в напряжение (фиг. 15), получим схему, передаточная характеристика которой представлена на фиг. 18; выходное напряжение V является нулевым, когда частота шниже о) затем линейно возрастает до значения со, выше которого напряжение . принимает нулевое значение.. Далее описаны средства управлершя образованием воспламеняющей искры, позволяющие исключить динамическое опережение зажигания, когда скорость вращения двигателя превышает максимальную величину (/ или мень ше . Блок управления запуском искровых генераторов (фиг. 19), снабженных средствами определения режимов скорости вращения двигателя и, следовательно, воздействующих на условия воспламенения цилиндров, содержит моностабильный мультивибратор 47, запускаемый сигналами 1) , соответствующими переднему фронту сигналов последовательности импульсов детектора 2, вырабатываемых дифференцирующей цепью 25, при этом период опрокидывания Т j Tj( логический элемент И 48, питаемый, с одной стороны выходом мультивибратора 47 и, с другой стороны, сигналами К, соответствующими переднему фронту последовательности импульсов детектора 3 (эти средства позволяют выделит режим скоростей, меньших минимальной скорости %); а также моностабильный мультивибратор 49, запускаемый сигналами : , соответствующими переднему фронту сигналов последовательностей импульсов детектора 2, вырабатываемых дифференцирующей церью 25 при этом период опрокидывания Т Фуу,/ схему 50 задержки, на которую поступают сигналы мультивибратора 47 и сигналы выход ячейки 48; схему 51 Sample and Hold, на ко торую поступают выходные сигналы мультивибратора 49 и сигналы К, соответствующие переднему фронту сигналов последовательност импульсов с детектора 3 (эти средства позвол ют выделить режим выброса оборотов, превы шающий максимальное значение WM ) 1 :. На входе преобразователя 27 частоты в на пряжение комбинация средств, опознавающих низкие скорости вращения и выбросы оборот делает неэффективными схемы 28 и 30, функ цией KOTOpbix является динамическое изменение углового опережения зажигания. При ско ростях меньше минимальной w и больше ма симальной cjp, искровые генераторы возбуждаются только сигналами К, соответствующим статическому опережению. Схемы 50-52 позволяют выключить зажигание, когда скорость вращения двигателя выше Ш|у , а нагрузка мала или равна нулю. В этом случае логический элемент И 52 получает сигнал схемы 51 Sample and Hold и выходной сигнал VP вакуум-преобразователя 4 или эквивалентный сигнал нагрузки двигателя. Сигнал выхода схемы 52 поступает в схему 53 задержки, которая получает также сигналы Э . При выбросе оборотов двигателя и слабой нагрузке импульсные сигналы К на триггер 29 не поступают. В этом случае искровые генераторы не запускаются, а выходной сигнал схемы 50 может быть использован для других целей, например для отключения подачи топлива в двигатель или для сигнала тревоги. В зависимости от типов и режимов эксплуатации двигателя описанная полная схема может быть упрощена. На фиг. 20 основные элементы схемы на фиг. 19 сохранены, но исключены мультивибраторы 47 и 48 повышения безопасности работы двигателя на малых скоррстях. Кроме того, исключены схемы 51-53 опознавания режимов выброса оборотов двигателя с нагрузкой и без, в этом случае зажигание цилиндров осуществляется при рабочих режимах двигателя, а при скоростях, меньших cj и больших cj опережение зажигания равно статическому опережению. Преимущества предлагаемой системы зажи- . гания по сравнению с известными заключаются в том, что механические части системы зажигания сведены до минимума; преобразователь положения поршней (различные варианты исполнения) весьма прост в реализации. Преобразователь выдает две последовательности выход ных сигналов, комбинация которых позволяет непосредственно получать: фазу цикла зажигания, моменты зажигания, соответствующие статическому опережению, моменты зажигания, соответствующие максимальному динамическому опережению скорости вращения двигателя, а также выделить различные участки работь двигателя. Блок контроля и запуска моментов искрового воспламенения автоматически обеспечивает точный запуск в соответствии с различными режимами работы двигателя и исключает, в частности, режимы выброса оборотов двигателя с нагрузкой и без нее. При пуске двигателя, когда выходное напряжение бортового источника питания подвергается значительным колебаниям, блок динамического опережения и блок расчета команд опережение-замедление выключены. Формула изобретения 1. Электронная система зажигания для двигателей внутреннего сгорания с четным числом
С цилиндров, содержащая преобразователь давпения, преобразователь положения поршней двигателя, которые подключены ко входам блока автоматического опережения зажигания, последовательно соединенного с электронным распределителем и искровыми генераторами, связанными со свечами зажигания, причем преобразователь положения поршней двигателя образован металлическими сегментами, имеющими разную длину и равномерно расположенными по окружности диска, связанного, например, с распределительным валом и двумя неподвижными детекторами, отличающаяся тем, что, с целью повышения точности момента зажигания, диск снабжен С/2 парами сегментов, причем длина дуги одной пары в два раза больше другой, выходы детекторов преобразователя положения поршней двигателя подключены ко входам двух каналов блока автоматического опережения зажигания и двум, входам электронного распределителя, выход преобразователя давления подключен к третьему входу блока автоматического опережения
зажигания, а его выход подсоединен к третьем входу электронного распределителя.
2. Система по п. 1, о т л и ч а ю щ а яс я тем, что выход блока автоматического опережения зажигания подключен к одному входу бистабильного триггера электронного распределителя непосредственно, а выходы детекторов преобразователя положения поршне двигателя подсоединены ко второму входу бистабильного триггера через последовательно включенные логический элемент И, фильтр верхних частот и полярный селектор, причем выход бистабильного триггера подключен к одним входам двух логических злементов И, к другим входам которых подсоединен выход блока автоматического опережения зажигания.
Источники информации, принятые во внимание при экспертизе
1.Патент США N 3182648, кл. 123-148, опублик. 1965.
2.Патент США № 3901201, кл. 123-117, опубяик. 1975. 2 т ыг
(риг. 2 J-
ЗВО
270 9() , hп л L
| название | год | авторы | номер документа |
|---|---|---|---|
| Система зажигания с электронным регулиро-ВАНиЕМ MOMEHTA иСКРООбРАзОВАНия | 1976 |
|
SU847940A3 |
| Электронная система зажигания | 1973 |
|
SU592372A3 |
| СИСТЕМА ЗАЖИГАНИЯ АВТОМОБИЛЯ | 2006 |
|
RU2306451C1 |
| Устройство для измерения скорости движения | 1983 |
|
SU1093975A2 |
| СИСТЕМА ЗАЖИГАНИЯ АВТОМОБИЛЯ | 2009 |
|
RU2426910C1 |
| Устройство для определения угла опережения зажигания в двигателях внутреннего сгорания | 1979 |
|
SU855247A1 |
| СИСТЕМА ЗАЖИГАНИЯ АВТОМОБИЛЯ | 2009 |
|
RU2426908C1 |
| СПОСОБ УСТАНОВКИ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ ДЛЯ БЕНЗИНОВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2056523C1 |
| СИСТЕМА ЗАЖИГАНИЯ ГАЗОВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2140011C1 |
| Система автоматического управления подачей и распределением порций расплавленного стекла в формовочную секционную машину | 1979 |
|
SU1080741A3 |





7
S
ts Т
IS
15
(pui.ff
(риг. 5
im//;
PflH
1
U
D
1
jh
M
-и-ь
Г8(7 (Риг.е
Pf1H3 Pf1Hif
П
Jfl
Jl L
7го
540
Jf еМ
S
Г
«м
t
г
м
1 t
tu
i.
5
90
L
M
(put.fO
Д
./3
т
ш
фаг.11
I 2f
;
i
Bit)
IPut. If Ш
-f
(риг. 15
o)(Racf.S-n
(/. /
J
J)l
//if
Q
(риг, 17
Уш A (loli5)
(л)т
ti)fi i(Rad.)
(Риг. n
м
«J
:э О
