(5) БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный торцовый переключатель | 1990 |
|
SU1812569A1 |
| Устройство для определения наличия металла | 1987 |
|
SU1434237A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ МЕТАЛЛА | 2005 |
|
RU2297017C1 |
| Бесконтактный торцовый переключатель | 1978 |
|
SU807401A1 |
| Устройство для определения наличия металла | 1985 |
|
SU1281869A1 |
| Автогенератор | 1985 |
|
SU1385218A1 |
| ФАЗОГЕНЕРАТОРНЫЙ ДАТЧИК КОНТРОЛЯ ВЫСОКОСКОРОСТНЫХ ТОКОПРОВОДЯЩИХ ОБЪЕКТОВ | 2018 |
|
RU2745385C2 |
| УСТРОЙСТВО ДЛЯ ПОДОГРАФИИ | 2013 |
|
RU2538634C1 |
| Кондуктометрическое устройство | 1981 |
|
SU996925A1 |
| Измеритель напряженности электростатического поля | 2016 |
|
RU2643701C1 |
,, 1; -
Изобретение относится к контрольно-измерительной технике и может использоваться для контроля положения перемещающихся объектов в любой области техники.
Известен датчик положения,содержащий автогенератор с чувствительным элементом в колебательном контуре 1.
Наиболее близким по технической сущности к. изобретению является бесконтактный датчик положения, содержащий последовательно соединенные автогенератор с чувствительным элементом в колебательном контуре,выпрямитель и пороговый элемент 2j.
Данные датчики имеют недостаточное быстродействие, поскольку, чтобы увеличить расстояние, на котором возможен контроль датчиков перемещающегося металлического объекта (увеличить чувствительность датчика) при определенных геометрических размерах и добротности колебательного контура,
необходимо уменьшать коэффициент передачи звена положительной обратной связи автогенератора с тем, чтобы его условия самовозбуждения оказались более близкими к срыву колебаний, а уменьшение этого коэффициента приводит к тому, что время нарастания амплитуды колебаний после их срыва металлическим объек,том и последующего его удаления
10 значительно увеличивается, что соответственно уменьшает быстродействие датчика.
Цель изобретения - повышение бы)5 стродействия.
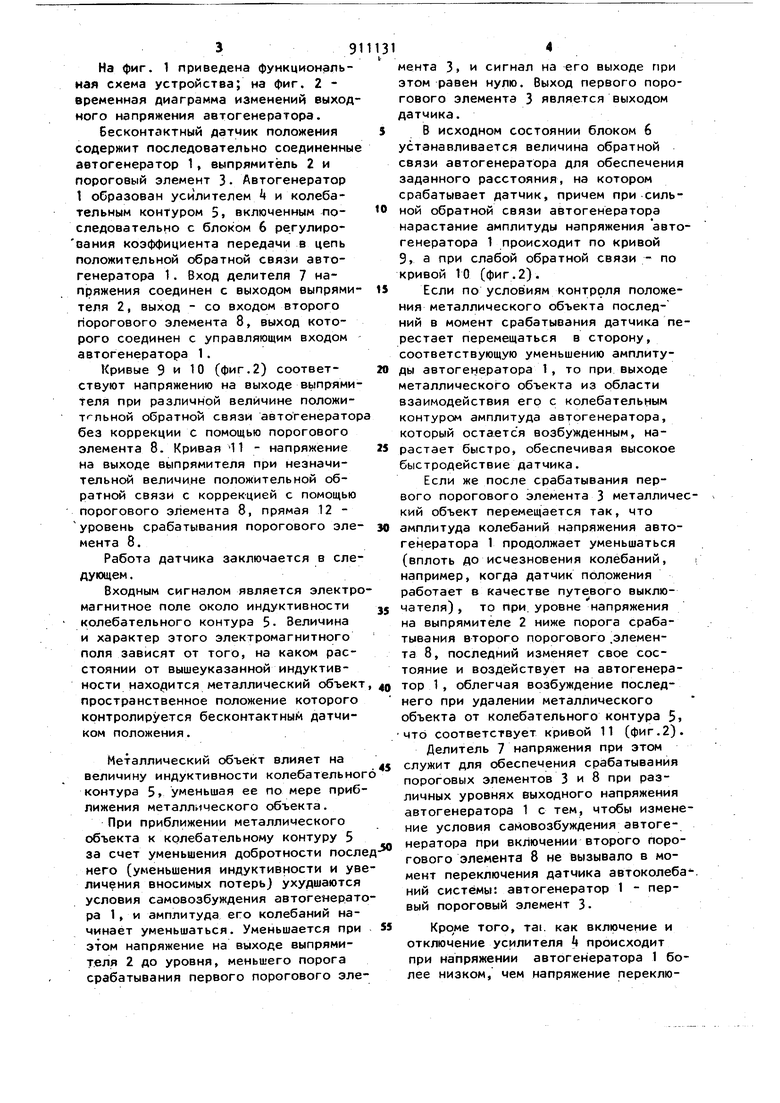
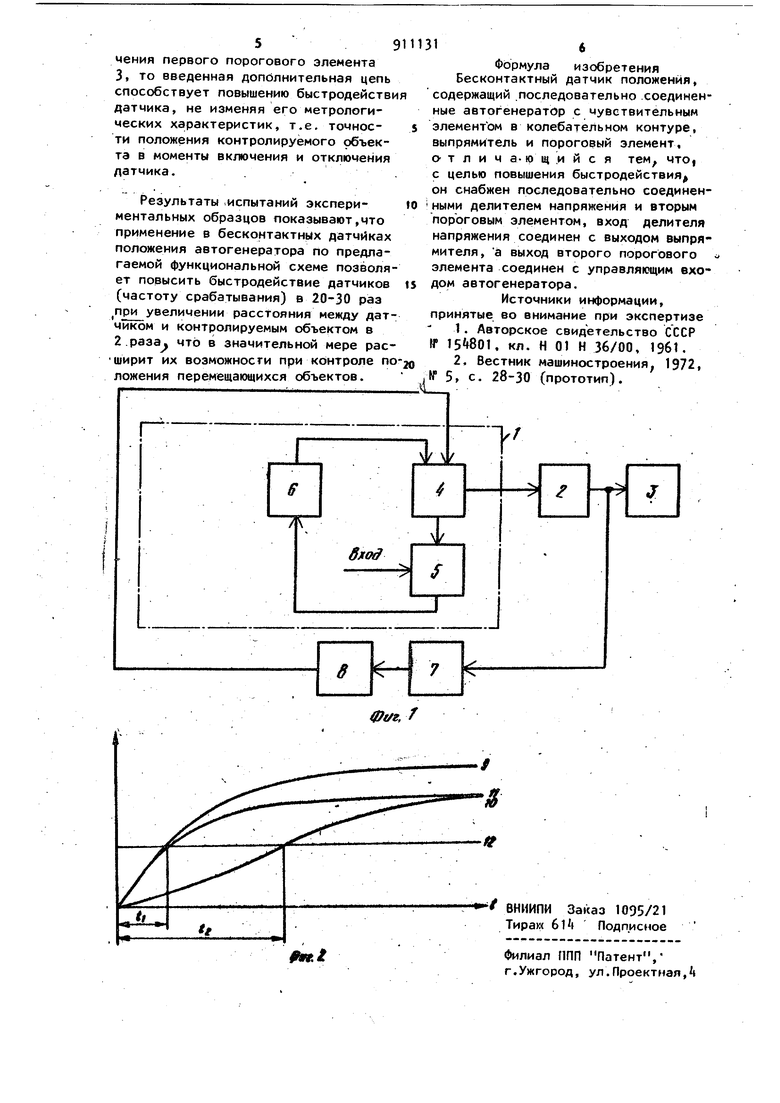
Указанная цель достигается тем, что датчик снабжен последовательно соединенными делителем напряжения и вторым пороговым элементом, вход де20лителя напряжения соединен с выходом выпрямителя, а выход второго порогового элемента соединен с управляющим входом автогенератора. 39 На фиг. 1 приведена функциональная схема устройства; на фиг. 2 временная диаграмма изменений выход ного напряжения автогенератора. Бесконтактный датчик положения содержит последовательно соединенные автогенератор 1, выпрямитель 2 и пороговый элемент 3. Автогенератор 1 образован усилителем и колебательным контуром 5. включенным последовательно с блоком 6 ре.гулирования коэффициента передачи в цепь положительной обратной связи автогенератора 1. Вход делителя 7 напряжения соединен с выходом выпрями теля 2, выход - со входом второго порогового элемента 8, выход которого соединен с управляющим входом автогенератора 1. Кривые 9 и 10 (фиг.2) соответствуют напряжению на выходе вь1прями Теля при различной величине положиТ льной обратной связи автогенерато без коррекции с помощью порогового элемента 8. Кривая 11 - напряжение на выходе выпрямителя при незначительной величине положительной обратной связи с коррек-цией с помощью порогового элемента 8, прямая 12 уровень срабатывания порогового эле мента 8. Работа датчика заключается в сле дующем. Входным сигналом является электр магнитное поле около индуктивности колебательного контура 5- Величина и характер этого электромагнитного поля зависят от того, на каком расстоянии от вышеуказанной индуктивности находится металлический объек пространственное положение которого контролируется бесконтактный датчиком положения. Металлический объект влияет на величину индуктивности колебательно контура 5 уменьшая ее по мере приб лижения металлического объекта. При приближении металлического объекта к колебательному контуру 5 за счет уменьшения добротности посл него (уменьшения индуктивности и ув личения вносимых потерь) ухудшаются условия самовозбуждения автогенерат ра 1, и амплитуда его колебаний начинает уменьшаться. Уменьшается при этом напряжение на выходе выпрямителя 2 до уровня, меньшего порога срабатывания первого порогового эле 4 мента 3 и сигнал на его выходе при этом равен нулю. Выход первого порогового элемента 3 является выходом датчика. В исходном состоянии блоком 6 устанавливается величина обратной связи автогенератора для обеспечения заданного расстояния, на котором срабатывает датчик, причем при сильной обратной связи автогенератора нарастание амплитуды напряжения автогенератора 1 происходит по кривой 9, а при слабой обратной связи - по кривой 10 (фиг.2). Если по условиям контроля положения металлического объекта последний в момент срабатывания датчика перестает перемещаться в сторону, соответствующую уменьшению амплитуды автогенератора 1, то при выходе металлического объекта из области взаимодействия его с колебательным контуром амплитуда автогенератора, который остается возбужденным, нарастает быстро, обеспечивая высокое быстродействие датчика. Если же после срабатывания первого порогового элемента 3 металлический объект перемещается так, что амплитуда колебаний напряжения автогенератора 1 продолжает уменьшаться (вплоть до исчезновения колебаний, например, когда датчик положения работает в качестве путевого выключателя) , то при. уровне напряжения на выпрямителе 2 ниже порога срабатывания второго порогового .элемента 8, последний изменяет свое состояние и воздействует на автогенератор 1, облегчая возбуждение последнего при удалении металлического объекта от колебательного контура 5j что соответствует кривой 11 (фиг.2). Делитель 7 напряжения при этом служит для обеспечения срабатывания пороговых элементов 3 и 8 при различных уровнях выходного напряжения автогенератора 1 с тем, чтобы изменение условия самовозбуждения автогенератора при включении второго Порогового элемента 8 не вызывало в момент переключения датчика автоколеба. НИИ системы: автогенератор 1 - первый пороговый элемент 3Кроме того, Tai. как включение и отключение усилителя k происходит при напряжении автогенератора 1 более низком, чем напряжение переключения первого порогового элемента 3t то введенная допьлнительная цепь способствует повышению быстродействи датчика, не изменяя его метрологических характеристик, т.е. точности положения контролируемого рбъекта в моменты включения и отключения датчика. . Результаты .испытаний экспериментальных образцов показывают,что применение в бесконтактных датчиках положения автогенератора по предлагаемой функциональной схеме позволяет повысить быстродействие датчиков (частоту срабатывания) в 20-30 раз при увеличении расстояния между датчиком и контролируемым объектом в 2.раза, что в значительной мере расширит их возможности при контроле по ложения перемещающихся объектов. Формула изобретения Бесконтактный датчик положения, содержащий .последовательно .соединенные автогенератор с чувствительным элементом в колебательном контуре, выпрямитель и пороговый элемент, О т л и ч а-ю щ и и с я тем, ЧТО| с целью повышения быстродействия он снабжен последовательно соединенными делителем напряжения и вторым пороговым элементом, вход делителя напряжения соединен с выходом выпрямителя , а выход второго порогового элемента соединен с управляющим входом автогенератора. Источники информации, принятые 80 внимание при экспертизе 1.Авторское свидетельство СССР № IStSOl, кл. Н 01 Н 36/00, 1961. 2,Вестник машиностроения, 1972, 5, с. 28-30 (прототип).
