(5) УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ МАСОК И ПОДЛОЖЕК
I
Изобретение относится к устройст;ву для совмещения масок и подложек, в которой маска центрована относительно оптической оси проекционного устройства, имеющиеся на маске структуры при проектировании переносятся на участок поверхности полупроводниковой подложки, и подложка для грубого и точного позиционирования укреплена на перемещаемой посредством механизма микроуправления в направляющих X и У и поворачивающейся в плоскости ХУ установке для приема подложки, которая, в свою очередь, расположена на грубо перемещаемом в направлениях X и У крестовом столике.
При фотолитографическом изготов лении полупроводниковых элементов имеющиеся на маске структуры переносятся на полупроводниковую подложку посредством проекционного или контактно,го Копирования. Для изготовления подупроводникового устройства МИКРОСХЕМЫ
требуется большое количество масок с различными структурами, которые последовательно служат для экспонирования, одного и того же участка подложки. Для 3toro перед каждым новым экспонированием необходимо посредством перемещения и поворота маски и/или подложки произвести совмещение нанесенных меток или уже имеющихся, структур маски и подложки.Чтобы достичь это необходимо очень чувcтвиteльнoe перемещение маски или подложки. В большинстве случаев присоса.нная к плоской поверхности подлож- . ка центрируется относительно маски, причем маска предварительно помещается в оптической оси проекционного об объектива.
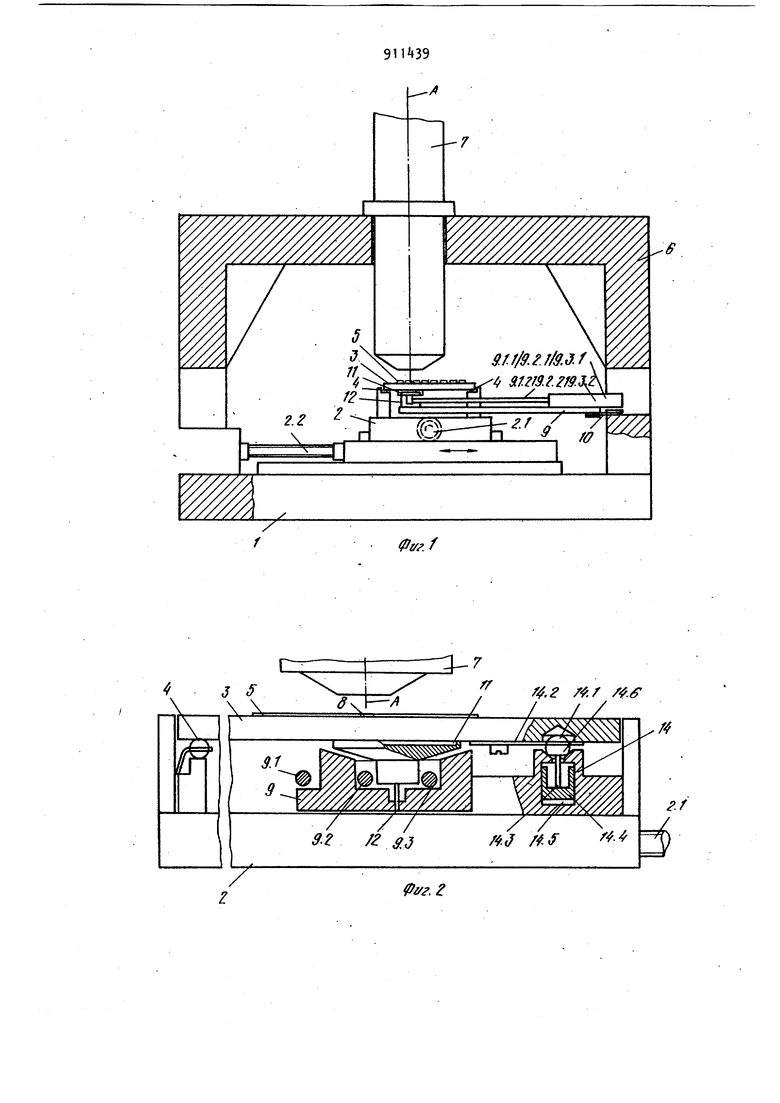
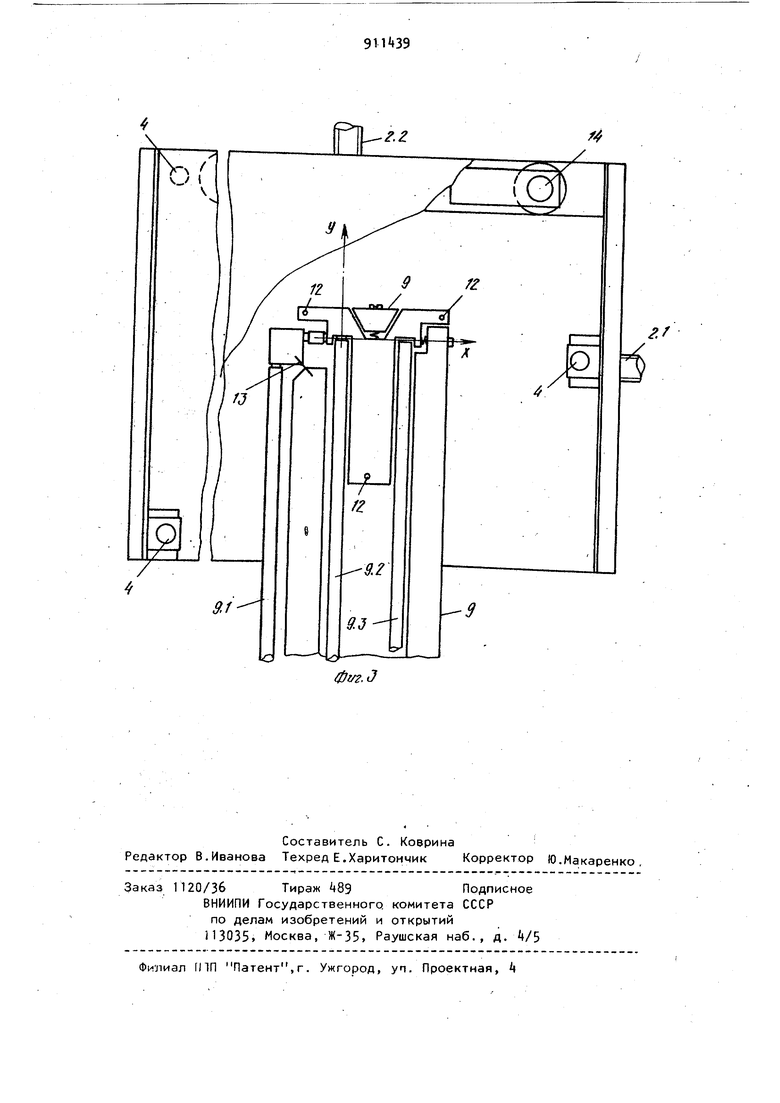
Если при экспонировании поверхность подложки использована полностью достаточна система перемещения с от носительно малыми путями. Для этого пригодны те приводные механизмы, которые используют такие физические 59 Первое арретирующее приспособление выполнено в виде пневматически или электромагнитно управляемого клеммового закрепления, а механизм микроуправления расположен подвижно в направлении оптической оси Айв качестве второго аррётирующего при с;пособления имеет аакуумноОтсасывающёе устройство. Проекционный объектив и механизм микроуправлёния мбгут быть установлены в одном общем мосту, возможно также непосредственно соединять механизм микроупраеления с проекционным устройством Два воздействующие на установку для приема подложки управляющих элемента расположёны, перпендикулярно друг другу в направлениях осей X и У, а третий управляющий элемент расположен параллельно оси У и точки прило жeния обоих к оси У параллельно лежащих управляющих элементов лежат ;на оси, X. Каждый управляющий элемен состоит из одного активного управля щего элемента и одного пассивного ползуна для передачи изменения длин управляющего элемента на установку для приема подложек. На фиг. 1 представлено устройств для совмещения маски с распоЛоженны ии в виде растра участками ntesepx«ости подложки , разрез; на фиг. 2 крестовый столик с установкой для приема подложки и механизмом микроу равления, вид сбоку; на фиг. 3 установка для приема подложки, частично закрытая. На onojie 1 находится крестовый столик 2 с соответствующими система ми привода 2.1 для координаты X и 2.2 для кoopдинatы У. На крестЬвом сТрлйке 2 на трех шариковых опорах 4 расположена установка для п|5иема подложек 3. Шариковые опоры могут 6bttib заменены опорными пружинами. На установке для приема подложек 3 закреплейа экспонируемая подложка 5 Выше в мосту 6 Проекционного объектива 7 расположена уже установленная относительно оптической оси А маска (не показана). В мосту 6 расположен также механизм 9 микроуправления , имеющий возможность вертикаль ного переме-1| ния на небольшие значения nocpepvTBOM пружинного шарнира 10. Вакуумно-.отсасывающее устройство представг.снное вакуум-присосом 11, посредством трех опорных пружин 12 .соединено с механизмом 9 микроуправ96ления. Для перемещения по осям X и У и поворота установки для приема подложек 3 вокруг точки пересечения осей X и У механизм микроуправления имеет три управляющих элемента 91,. 9-2, 9-3 направление еоздействия управляющег-о элемента 9-1 для перемещения в направлении X изменяется с помощью пружинного шарнира 13 на 0 (фиг. 3) Точки приложе- i Ния силы; управляющих элементов для перемещения в наттравлении 9.2 и поворота 9.3 лежат на оси X, ха к что Обеспечивается гюворрт Подложек 5 вокруг определенной оси вращения,которая проходит через Имеющуюся на Подложке 5 юстиррврчную метку 8.Управляющие элементы состоят из одного активногр управляющего элемента 9.1.1,9.2.1,9-3.1 и одного пассивного Ползуна 9-1-2, 9-2.2, 9.3-2 (фиг. 1). Активный Элемент может состоять из электрОстрйктивного материала, изменение длинь) которого посредством пассивного ползуна переносится на установку для приема подложек 3На фиг. 2 изображено шариковое арретирующее приспособление 14 крестового столика 2 с установкой для приема подложек 3 Ойо состоит из шарика lA.li который прсредством плоской Пружины 14.2 закреплен на нижней стороне устройства для приёр1а подложек 3 и посредством стержневой пружинь Т4.3 соединен с поршнем 14.4. Поршень 14.4 скользит в цилиндре Т4. 5, имеющем ввод для отсоса воздуха. При отсасывании воздуха шарик 14.1 втягивается в конус 14.6 и вызывает тем самым соединение установки для приема подложек 3 с крестовым столиком 2. В этом положении крестовый столик 2 перемещает подложку 5 в первое заданное определенными значениями координат X и У рабрчее прложенйе. После грубого позицирнироЬания нзстировочные метки на маске еще не будут совмещены с метками на подложке. Это будет осуществлено шариковым арретирующим приспособлением 14, т.е. установка для приема подложек 3 может теперь перемещаться на небольшое значение относительно крестового столика 2. Одновременно установка для приема подложек 3 посредством вакуум-присоса 11 соединяется с механизмом 9 микроуправлехия. При приведении в действие управляющих элементов 9-1. 9-2
3 . Я
эффекты, как электро- или магнитострикционные.
Если для полного экспонирования поверхности подложки требуется несколько перекрывающих друг друга и последовательных или расположенных в растровом порядке отдельных экспонирований, то дополнительно к чувствительной системе перемещения с ма лыми путями должна иметься вторая система перемещения, которая позволяет большие перемещения и пригодна для перемещения подложки при ступен чато-шаговом способе.
Известно.устройство для изготовления масок из фотолака, содержащее чувствительно перемещаемый столик, несущий изготавливаемую маску, механически соединенный с крестовым столиком. С помощью крестового столика маска грубо позиционируется. Точное позиционирование в направлениях координат X и У вызывает бесприводный- механизм точной установки, действующий между обоими столиками, работающий преимущественно на физическом эффекту (тепловое расширение, электроили магнитострикция). Если для точного позиционирования маска должна быть повернута в плоскости ХУ вокруг определенной точки, то необходим дополнительный поворотный столик,размещенный на чувствительно перемещаемом столике и приводимый в движение отдельно. ,
Недостатки такого устройства заключаются в том, что общая система столиков вследствие дополнительной плоскости является относительно неустойчивой и легко склонна к колебаниям, кроме того, очень велика опас.ность нежелательного опрокидывания вокруг осей X и У.
При использовании устройства не только.для Изготовления масок, но также и для экспонирования подложек ступенчато-шаговым способом, появля-ются и другие значительные недостатки. Так как это устройство, имеет только одну единственную, заданную осью поворотного столика, точку вращения, не могут быть выполнены основные требования для каждой юстировки, которые заключаются в том, что, вопервых, полная юстировка должна сос тоять- из возможно меньшего количества отдельных шагов и, во-вторых,ни один шаг юстировки не должен влиять на результат какого-нибудь преДыду 394
щего шага. После каждого поворота подложки уже установленные точки в направлении X и У должны быть опять отрегулированы, поскольку точка переJ сечения координат X и У случайно не лежит на оси вращения поворотного столика. В особенно неблагоприятных случаях юстировочные шаги должны быть повторены много раз, так что для точного совмещения маски с подложкой необходимо не могущее быть оправданным длительное время юстировки.
Известно также устройство, в котором перемещение по X и У и поворот
5 столика, несущего подложку, достигается, с помощью трех исполнительных элементов, первый из которых, лежит в одном направлении координат, а два других расположены к нему под прямыми
0 углами. Посредством раздельной настройки обоих параллельных исполнительных элементов достигается поворот подложки.
Этим устройством может быть реализована не любая точка вращения на подложке, так что точная установка подложки возможна только при длительном итерационном процессе. Кроме того, в устройстве при-автомати- ческом управлении постоянно изменя,ется соотношение сигнал-путь.
Цель изобретения - сокращение времени юстировки и установки, за счет чего уменьшается время и затраты на производство полупроводниковых
5 элементов.
Поставленная.цель достигается тем, что 3 устройстве подложка для грубого и точного позиционирования закреплена на перемещаемой посредством
0 механизма микроуправления в направлениях X и У и поворачивающейся в плоскости ХУ установке для приема подложки, которая в свою очередь расположена на грубо перемещающемся в
5 направлениях X и.У крестовом столике, крестовый- столик имеет взаимодействующее с установкой для приема подложки во время грубого позициони:рования арретирующее приспособление,
0 и механизм микроуправления, имеющий . три известным образом расположенных управляющих элемента, установлен неподвижно относительно оптической оси А проекционного устройства и соединен со вторым арретирующиМ приспособлением, взаимодействующим при точном позиционировании с установкой . для приема подложки.
79
и 9-3 осуществляется точное позиционирование подложки. После экспонирования первого участка механизм 9 .микроуправления отсоединяется от установки для приема подложек 3 и последняя снова соединяется с крестовым столиком 2. Крестовый столик выводит подложку во второе рабочее положение, после чего рабочие шаги повторяются до тех пор, пока подложка 5 не будет полностью проэкспонирована.
Предлагаемое устройство для совмещения масок и подложек микросхемы по сравнению с известными имеет следующие преимущества.
Для определенного перемещения столика с подложкой не требуется центрирования} установочное движение управляющих элементов полностью преобразуется в требуемое направление перемещения. При автоматическом совмещении сигнал, полученный при отклонении от заданного положения, аналогично преобразуется в утсановочное движение; управляющие элементы могут находиться далеко от подложек, так что уменьшаются вносящие ошибки воздействия на подложку, например из-за тепла.
Механизм микроуправления мржет иметь относительно большие размеры. Хорошая возможность доступа обеспечивает также хорошее техническое обслуживание, а также быструю смену и юстировку без размонтирования установки для приема подложек, на установку для приема подложек не действуют силы от проводов для подачи энергии управляющим элементам.
Формула изобретения
1. Устройство для совмещения масок и подложек микросхемы, в котором маска установлена относительно оптической оси проекционного устройства, и находящиеся на маске структуры проектируются на часть поверхности подложки, и подложка для грубого и точного позиционирования укреплена на установке для приема подложки, перемещающейся в направлении X и У и пово,- -рачивающейся в плоскостиХ,У с
мощью механизма микроуправления, и которая, в свою очередь, установлена на крестовом столике, грубо перемещающемся в направлении X и У, о т5 личающееся тем, что у крестового столика находится первое арретирующее приспособление, взаимодействующее с установкой для приема подложки при грубом перемещении,и
o механизм микроуправления, имеющий три в определенном порядке расположенных управляющих элемента установлен неподвижно относительно оптической оси А проекционного устройства
5 и связан со вторым арретирующим приспособлением, взаимодействующим с установкой для приема подложки при точном перемещении.
2. Устройство по п. 1, о т h и 0 ч а ю щ,е е. с я тем, что первое арретирующее приспособление выполнено в виде пневматически или электррмагнитно срабатывающего клеммового закрепления.
5 3. Устройство по п. 1, о т л и чающееся тем, что механизм микроуправления установлен подвижно по направлению оптической оси А и как второе арретирующее приспособление
0 обладает вакуумным, отсасывающим устройством.
4. Устройство по п. 1, о т л и чающееся тем, что проекционное устройство и механизм микроуправ- ления помещены в общей перемычке.
5.Устройство по П.1, отличающееся тем, что, механизм микроуправления непосредственно связан с проекционным устройством.
0 6. Устройство поп. 1, о т л иц а ю щ е е с. я тем, что два управляющих элемента, соединенные с установкой для приема подложки, расположены перпендикулярно друг к другу
5 по оси X и -У, и третий управляющий элемент расположен параллельно оси У и точки .приложения обоих к оси У параллельно лежащих управляющих элементов лежат на оси X.
7. Устройство по п. 1, о т л и чающееся тем, что управляющие элеме.нты состоят из одного активного- управляющего элемента и одного пассивного ползуна.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДЛОЖКИ В СИСТЕМЕ ЛИТОГРАФИИ, ПОДЛОЖКА ДЛЯ ИСПОЛЬЗОВАНИЯ В ТАКОМ СПОСОБЕ И СИСТЕМА ЛИТОГРАФИИ ДЛЯ ВЫПОЛНЕНИЯ ТАКОГО СПОСОБА | 2013 |
|
RU2659967C2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2251132C2 |
| Фотокоординатограф | 1984 |
|
SU1247820A1 |
| Цифровая машина для управления про-цЕССАМи элЕКТРОННОлучЕВОй МиКРООбРА-бОТКи | 1978 |
|
SU840916A2 |
| Устройство для изготовления фотошаб-лОНОВ пЕчАТНыХ плАТ | 1979 |
|
SU847535A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ РИСУНКОВ | 1999 |
|
RU2257603C2 |
| Устройство для проекционного совмещения и мультипликации изображений | 1982 |
|
SU1088527A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2251133C1 |
| УСОВЕРШЕНСТВОВАННЫЙ ГЕНЕРАТОР РИСУНКОВ | 1999 |
|
RU2232411C2 |
| Способ изготовления светофильтра для коррекции освещенности при фотоэкспонировании экранов цветных электронно-лучевых трубок | 1990 |
|
SU1709425A1 |
/ / / 9.2 / j fj.2 / / / /«(7 f.f
уг.г /.ff / /
