(54) ОПТИЧЕСКИЙ ТЕЛЕСКОП С НЕСИММЕТРИЧНОЙ МОНТИРОВКОЙ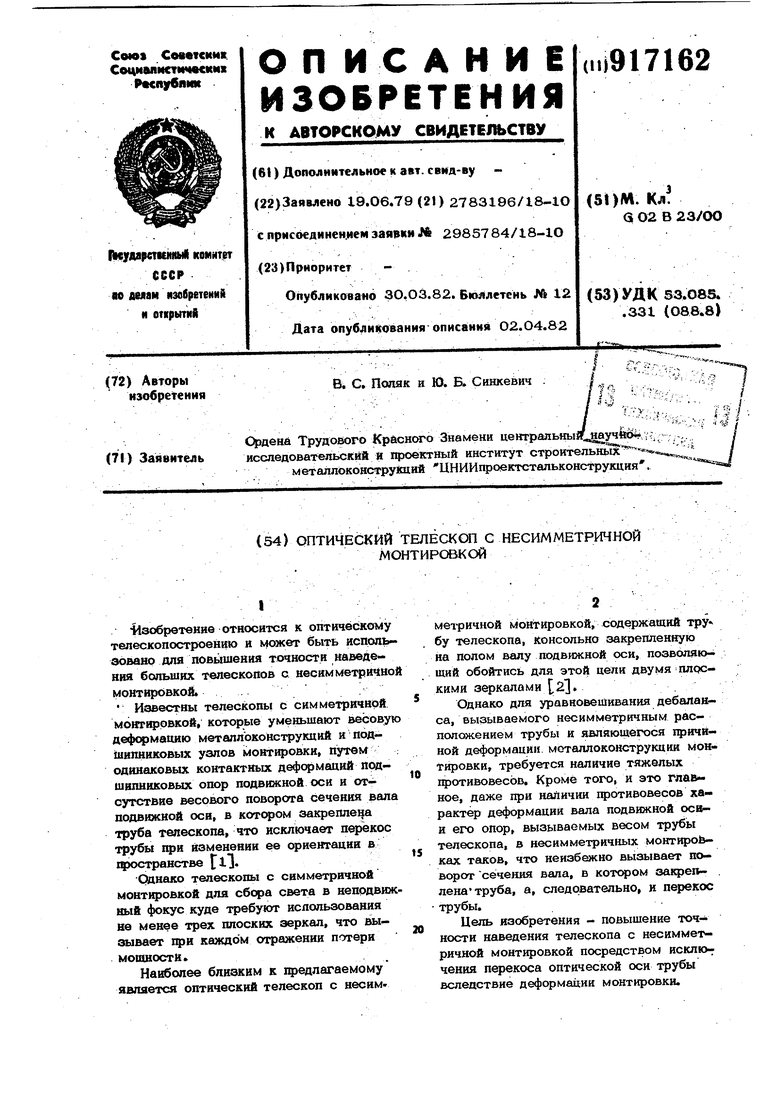
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| Труба оптического телескопа | 1979 |
|
SU777622A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2111519C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2119681C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166783C2 |
| Труба оптического телескопа | 1981 |
|
SU983625A1 |
| Труба оптического телескопа | 1977 |
|
SU731411A1 |
| Труба телескопа | 1981 |
|
SU1012181A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
. 1. ., -,.
Изобретение относится к оптическому телесхопостроению и может быть использовано для повышения точности каведення больших телескопов с несимметри 1ной MOHTHpuBKoit.
Известны телескопы с симметричной мЬнт1фрвкой, которые уменьшают весовую деформацию металлоконструкций и под шипниковых узлов монтировки, путем : одинаковых контактных деформаций подшипниковых опор подвижной оси и отсутствие весового поворота сечения вала подвижной оси, в котором закрепле1}а труба телескопа, что исключает перекос трубы 1ФИ изменении ее ориентации в цххугранстве f ll.
Однако телескопы с симметричной монтировкой для сбора света в неподвижный фокус куде требуют использования не менее трех плоских зеркал, что вызывает при каждом отражении потери мощности.
Наиболее близким к предлагаемому является оптический телескоп с несим
метричной монтировкой, содержащий тру бу телескопа, Консольно закрепленною на полом подвижной оси, позволяющий обойтись для этой цели двумя плоскими зеркалами 2.
Однако для уравновешивания дебалан- са, вызываемого несимметричным располс к.ением трубы и являющегося ной деформации металлоконструкции монтировки, требуется наличие тяжелых
10 хфотивовесов. Кроме того, и это главное, даже при наличии противовесов характер деформации вала подвижной осви его опор, вызываемых весом трубы телескопа, в несимметричных монтироЬ-
15 ках таков, что неизбежно вызывает поворот сечения вала, в котором за1феп- . ленатруба, а, следовательно, и перекос трубы.
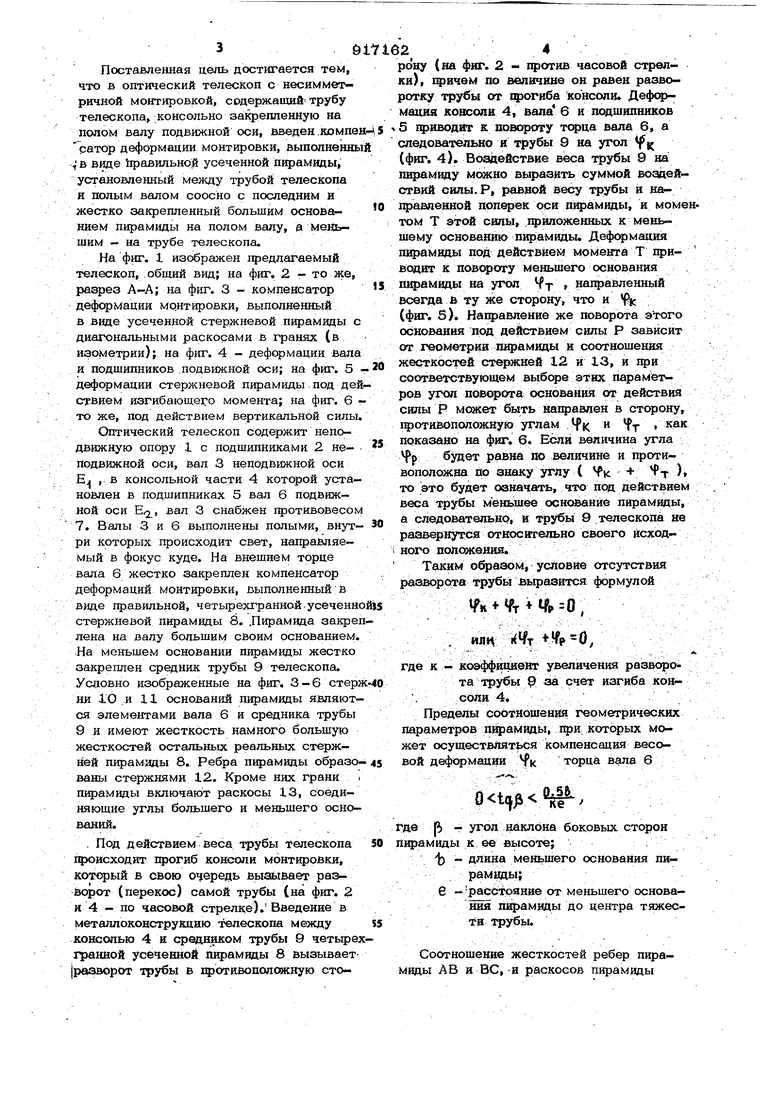
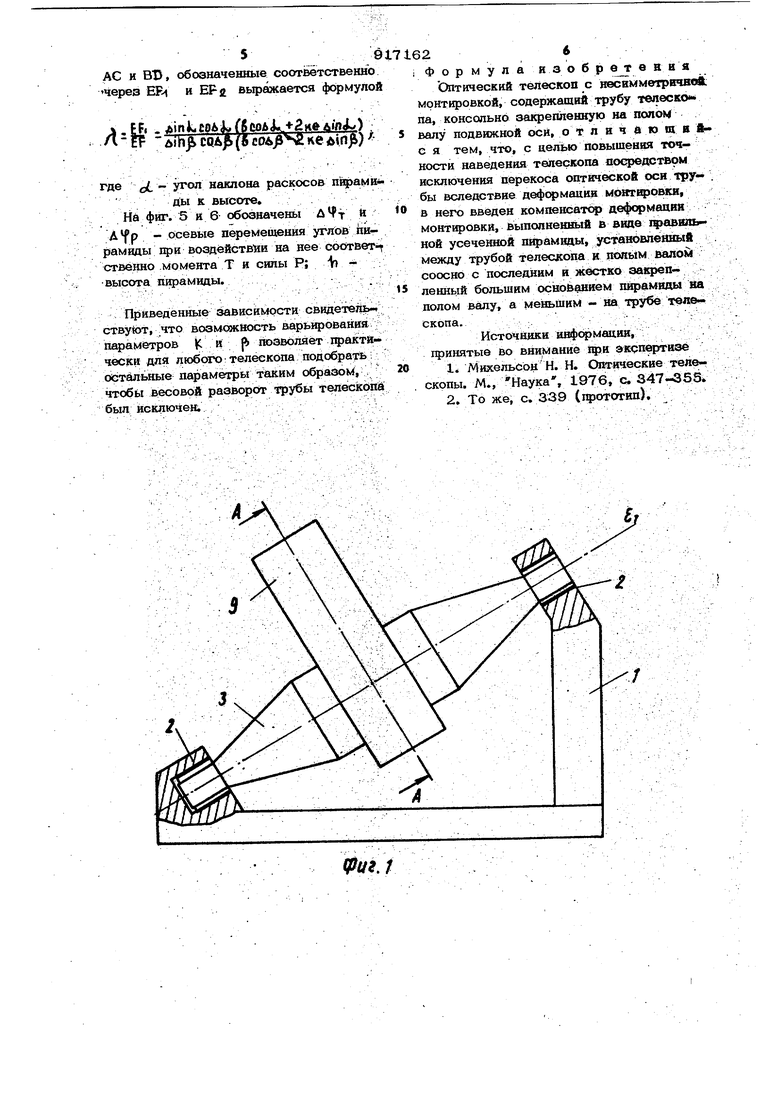
Цель изобретения - повышение точ20ности наведения телескопа с несимметричной монтировкой посредством исклю чения перекоса оптической оси трубы вследствие деформации монтировки. Поставленная цель дсхзтигается тем, что в оптический телескоп с несимметричной монтировкой, содержащий трубу телескопа, консольно загсрепленную на полом валу подвижной оси, введен,компе сатор деформации монтировки, выполненны 1 в виде 1фавильной усеченной пирамиды, установленный между трубой телескопа и полым валом соосно с последним и жестко закрепленный большим основа нием пирамиды на полом валу, а меньшим - на трубе телескопа На фиг. 1 изображен предлагаемый телескоп, общий вид; на фиг. 2 - то же, разрез А-А; на фиг. 3 - компенсатор деформации мрнтировки, выполненный в виде усеченной стержневой пирамиды с диагональными раскосами в гранях (в изометрии); на фиг. 4 - дeфqpмaции вала и подщипников .подвижной оси; на фиг. 5 деформации стержневой пирамиды под де ствием изгибающего момента; на фиг. 6 то же, под действием вертикальной силы Оптический телескоп содержит неподвижную опору 1 с подшипниками 2 неподвижной оси, вал 3 неподвижной оси Е , в консольной части 4 которой установлен в подшипниках 5 вал 6 подвижной оси Е-2, вал 3 снабжен противовесом 7. Валы 3 и 6 выполнены полыми, внут ри которых происходит свет, направляемый в фокус куде. На внешнем торце вала 6 жестко закреплен компенсатор деформаций монтировки, выполненный в виде правильной, четьфезсгранной.усеченн стержневой пирамиды 8. .Пирамида закре лена на валу большим своим основанием. На меньшем основании пирамиды жестко закреплен средник трубы 9 телескопа. Условно изображенные на фиг. 3-6 стер ни 1О .и 11 оснований пирамиды являют ся элементами вала 6 и средника трубы 9 и имеют жесткость намного большую жесткостей остальных реальных стержней пирамиды 8. Ребра пирамиды образо Ваны стержнями 12. Кроме них грани пирамиды включают раскосы 13, соединяющие углы большего и меньшего оснований. . Под действием веса трубы телескопа хдюисходит прогиб консоли монтировки, который в свою очередь выаь1Вает разворот (перекос) самой трубы (на фиг. 2 и 4 - по часовой стрелке). Введение в металлоконструкцию телескопа между консолью 4 и средником трубы 9 четьфе грашюй усеченной пирамиды 8 вызывает jpaflBOpOT трубы в противоположную сто&2 рону (на фиг. 2 - против часовой стрелки), 1фвчем по велгхчине он равен разворотку трубы от врогиба консоли. Деф мация ковсопн 4 вала 6 и подшипников 5 1ц){шодит к новороту торца вала б, а следовательно и трубы 9 на угол Y к (фиг, 4). Воэдействие веса трубы 9 на пщшмиду можно выразить суммЬй воздействий силы. Р, равной весу трубы и на аравп&шоН, поперек оси пирамиды, и моментом Т этой сипы, .1Ч)йпоженных к меньшему основанию пирамиды. Деформация шфамиды под действием момента Т приводит к повсфоту меньшего основания П1фемиды на угол , направленный всегда в ту же сторону, что и Рк (фиг. S). Направление же поворота этого основания под действием силы Р зависит от геометрии пирамиды и соотношения жесткостей стержйей 12 И 13, и при соответствующем выборе этих параметров угол nOBtqjOTa основания от действия силы Р может быть направлен в сторону, гфотивоположную углам 4 и показано на фиг. €. Если величина угла fp будет равна по величине и противоположна по знаку углу ( |с + РТ )t то это будет означать, что под действием веса трубы основание пирамиды, а следовательно, и трубы 9 телескопа не развернутся относетельно своего Исходного полозкеНия. Таким образом, условие отсутствия paQBopcera трубы выразится формулой ; йл i(4V +VP-O; где к - коэффициент увеличения разворота трубы 9 за счет изгиба кон,. ;Солн 4. ....,, . . Пределы соотношения геометрических параметров пирамиды, при, которых может осуществйят1Мзя компенсация весовой деформации Лрц торца вала б де Р) - угол наклона боковых сторон нрамиды к ее высоте;; Ь - длина меньшего основания пи- рамцды; е - расстояние от меньшего основания пирамиды до центра тяжести 1рубьи Соотношение жесткостей ребер пирамиды А В и ВС, и раскосов пирамиды AC и ВВ, обозначенные соответственно через ЕЕ и EFj выражается формулой Д. . juinLcoAAs(gcoAJv gK A nJ) tF (бcoA леAin) где oJ. - угол наклона раскосов njapaw и ды к высоте. На фиг. 5 и 6 обозначень Д т и А.р - осевые перемещения углов пирамиды при воздействии на нее сбогвет ственно момента Т и силы Р; V) - V высота пирамиды. ; Прйведен1а1е зависимости свидетель-, ствуют, что возможнсють варыфованйя параметров К и f позволяет лфактйческн для любого:телескопа подобрать о ;тальные параметры -таким образом, чтобы весовой разворот трубы Телескбпй был йскдюче : Фор мула изобр в н а я Оптический телескоп с неснмметрвчнсА монтировкой, содержащий трубу тепеско па, консольно закрепленную на попом валу подвижной оси, от л н чаю щ в йс я тем, что, с целью повышения точности наведения телескопа аосредством исключения перекоса оптической осн трУ- . бы вследствие деформации моягщиовки, в него введен компенсатср деформация МОНТ1ФОВКИ, выполненный в виде праввш ной усеченной пирамиды, установленвснй между Трубой телескопа и поным валом соосно с последним и зкестко закрепленный большим осноВ 1Нием пирамшгы на полом валу, а меньшим - на трубе скопа... ;..;,. :: ;; ., .; .: ; Источники инффмации, принятые во внимание щ)и экспертизе 1 Михельсон Н. Н. OratwecKHe теле скопы. М., Наука , 1976, с. 347-35S 2. То же, с. 339 (щзототип).
0t/i.f
АА
w It
n . 3
