Изобретение относится к оптическому приборостроению и может быть использовано для телескопов с горизонтальной (альт-альт) монтировкой.
Известны различные типы монтировок оптических телескопов (Оптические телескопы. Теория и конструкция. Михельсон Н.Н., Главная редакция физико-математической литературы изд-ва "Наука", 1976, с. 336-358).
Известен оптический телескоп с экваториальной монтировкой по авт. св. N 1195324, кл. G 02 B 23/16, F 16 C 29/04, 1985. Известный телескоп приводится в действие посредством безредукторных приводов наведения с моментными двигателями, установленными непосредственно на осях наведения.
Недостатком телескопа с экваториальной монтировкой является изгиб его полярной оси, обуславливающий смещение оптической оси телескопа, которое имеет сложную зависимость от углов наведения телескопа. Кроме того, эта монтировка требует очень точной установки телескопа и предъявляет относительно высокие требования к взаимной перпендикулярности его осей наведения.
Известен телескоп с альт-азимутальной монтировкой по патенту СССР N 1708165, кл. G 02 B 23/00, 1992.
Недостатком телескопов с подобной монтировкой является то, что в близзенитной области скорость изменения азимута и параллактического угла, а также их ускорение становятся очень большими. Поскольку ускорения и скорости вращения приводов монтировки ограничены конструктивно, небольшой телесный угол вблизи зенита оказывается недоступным для наблюдений. По этой причине подобная монтировка не может быть использована в оптических устройствах, к которым предъявляется требование непрерывного слежения за объектом, проходящим через область зенита.
Известна горизонтальная (альт-альт) монтировка, включающая опорно-поворотное устройство со взаимно-ортогональными осями вращения, выполненное в виде установленной на стойках неподвижного основания горизонтальной оси, на которой с возможностью вращения установлена вторая ось с жестко закрепленной трубой телескопа (см. упомянутую книгу с.337, рис. 11.1в). Такая монтировка позволяет обеспечить непрерывное слежение за объектом, проходящим через область зенита.
Недостатком известной горизонтальной монтировки является относительная сложность оптической схемы для передачи светового пучка к неподвижной светоприемной аппаратуре.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является устройство полиапертурного телескопа по авт. св. N 717692, кл. G 02 B 27/00, 1980.
Известное оптическое устройство содержит взаимно параллельные оптические блоки, смонтированные на опорно-поворотном устройстве со взаимно ортогональными осями вращения, приводы вращения относительно этих осей. Опорно-поворотное устройство выполнено в виде установленного в опорах, закрепленных на основании, полого вала с установленными воль него парами оптических блоков, каждый из которых жестко закреплен на полых полуосях, установленных с возможностью вращения на упомянутом полом валу. Геометрическая ось полого вала неподвижна. Полуоси каждой пары оптических блоков соосны между собой, параллельны полуосям остальных оптических блоков и ортогональны оси полого вала. Оптическая схема каждого оптического блока включает плоское зеркало, установленное внутри корпуса упомянутого полого вала. Для обеспечения параллельности оптических осей приводы вращения оптических блоков выполнены синхронными. При этом каждое зеркало снабжено корректирующим следящим приводом, что обеспечивает точную коррекцию направления оптических осей всех оптических блоков.
Недостатком известного устройства является то, что оно предполагает консольное закрепление оптического блока на полых полуосях. Такое крепление одновременно с небольшой конструктивной базой опор полых полуосей не обеспечивает достаточную жесткость конструкции и обуславливает развал оптических осей оптических блоков каждой пары и, как следствие, необходимость коррекции направления оптических осей. Вариант исполнения, при котором каждый оптический блок устанавливают на двух полых полуосях, уменьшает развал оптических осей пары оптических блоков, однако требует установки на полом валу противовеса для балансировки системы.
Кроме того, недостатком известного устройства является возможность отклонения оптических осей вследствие различных температурных деформаций металлоконструкции опорно-поворотного устройства и основания. Особенно сильно это сказывается при больших расстояниях между опорами полого вала.
К недостаткам известного устройства относится также то, что оно предполагает применение электромеханических приводов наведения с зубчатыми передачами, которые вносят значительные погрешности в точность наведения телескопа. При этом изготовление подобных зубчатых передач требует прецизионного оборудования и обуславливает относительно высокие затраты на изготовление и обслуживание телескопа.
Отмеченные недостатки ограничивают возможность использования известного устройства в высокоточных оптических устройствах.
Предлагаемое изобретение решает задачу повышения точности наведения оптического устройства путем повышения жесткости несущих узлов опорно-поворотного устройства, размещения приводов наведения непосредственно на осях наведения и исключения отклонений оптических осей вследствие различных температурных деформаций опорно-поворотного устройства и основания.
Эта задача решается благодаря тому, что в оптическом устройстве, содержащем взаимно параллельные оптические блоки, смонтированные на опорно-поворотном устройстве со взаимно ортогональными осями вращения, выполненном в виде установленного в опорах, закрепленных на основании, первого полого вала, геометрическая ось которого неподвижна, на котором в соосных опорах с возможностью вращения относительно оси, ортогональной упомянутой, установлены оптические блоки, приводы вращения относительно упомянутых осей и зеркало, установленное с возможностью регулировки его положения внутри корпуса первого вала, согласно изобретению оптические блоки жестко закреплены на едином полом валу, установленном в упомянутых соосных опорах. При этом второй полый вал выполнен с вырезом с возможностью размещения в нем зеркала, установленного на опоре, коаксиально закрепленной внутри корпуса первого вала и выполненной в виде раструба или усеченной стержневой пирамиды с возможностью прохождения оптического луча вдоль ее оси. Каждый привод вращения выполнен в виде по меньшей мере одного моментного двигателя, включающего в себя статор и ротор, соединенный с валом соответствующей оси вращения, при этом второй вал выполнен с образованием свободного конца, который через переходник с помощью разъемного соединения соединен с ротором моментного двигателя, статор которого закреплен на корпусе первого вала, а корпус первого вала выполнен с переходником, связанным с помощью разъемного соединения с ротором другого моментного двигателя, статор которого закреплен на опоре первого вала. Между основанием опорно-поворотного устройства и первым валом, а также между валами установлены устройства фиксации их взаимного положения. Одна из опор первого вала снабжена средством для компенсации температурных деформаций.
Такая конструкция монтировки с безредукторными приводами наведения, снабженными моментными двигателями, установленными непосредственно на осях наведения, позволяет существенно повысить общую жесткость устройства и частотные характеристики монтировки до 15-25 Гц. Одновременно с этим исключаются ошибки наведения из-за погрешностей, присущих зубчатым передачам. Кроме того, такое выполнение позволяет повысить точность наведения оптического устройства посредством исключения отклонения осей оптических блоков вследствие различных температурных деформаций опорно-поворотного устройства и основания. Благодаря фиксации взаимно-подвижных частей монтировки поворотные части опорно-поворотного устройства на любом рабочем угле удерживаются от поворота при воздействии внешних факторов, например, ветра и в случае обесточивания моментного двигателя.
Средство для компенсации температурных деформаций может быть выполнено в виде установленных параллельно оси первого вала между опорой этого вала и основанием по меньшей мере двух пар призматических направляющих, между которыми размещены шары, расположенные в сепарирующих обоймах. При этом опора и основание могут быть связаны между собой вертикально расположенными тягами. Такое выполнение позволяет компенсировать различие температурных деформаций опорно-поворотного устройства и основания и одновременно обеспечивает необходимую жесткость опорного узла монтировки.
Кроме того, каждый вал имеет датчик положения по углу и датчик скорости, которые включают в себя статор и ротор, соединенный через переходник с помощью разъемного соединения с валом. При этом каждая из опор первого вала со стороны конца вала выполнена с переходником для статора соответствующего датчика. Датчик скорости второго вала расположен внутри корпуса первого вала, выполненного с переходником для статора этого датчика. Датчик положения по углу второго вала размещен внутри корпуса этого вала, а статор этого датчика через соответствующий переходник закреплен на упомянутой опоре зеркала. При этом через первый полый вал со стороны, противоположной опоре зеркала, пропущен кабелепереход с основания опорно-поворотного устройства на первый вал.
Между основанием опорно-поворотного устройства и первым валом, а также между первым и вторым валами могут быть установлены буферные устройства. Такое выполнение обеспечивает безударное торможение и остановку поворотных частей устройства на предельных углах наведения в случае аварийной ситуации при несрабатывании концевых выключателей приводов вращения.
Буферное устройство, установленное между основанием опорно-поворотного устройства и первым валом, может быть выполнено в виде торсионного вала и гидравлического демпфера, кинематически связанных между собой с помощью закрепленного на торсионном валу двуплечего рычага, взаимодействующего с упорами, выполненными на первом валу. При этом торсионный вал и гидравлический демпфер буферного устройства первого вала могут быть закреплены на опоре первого вала.
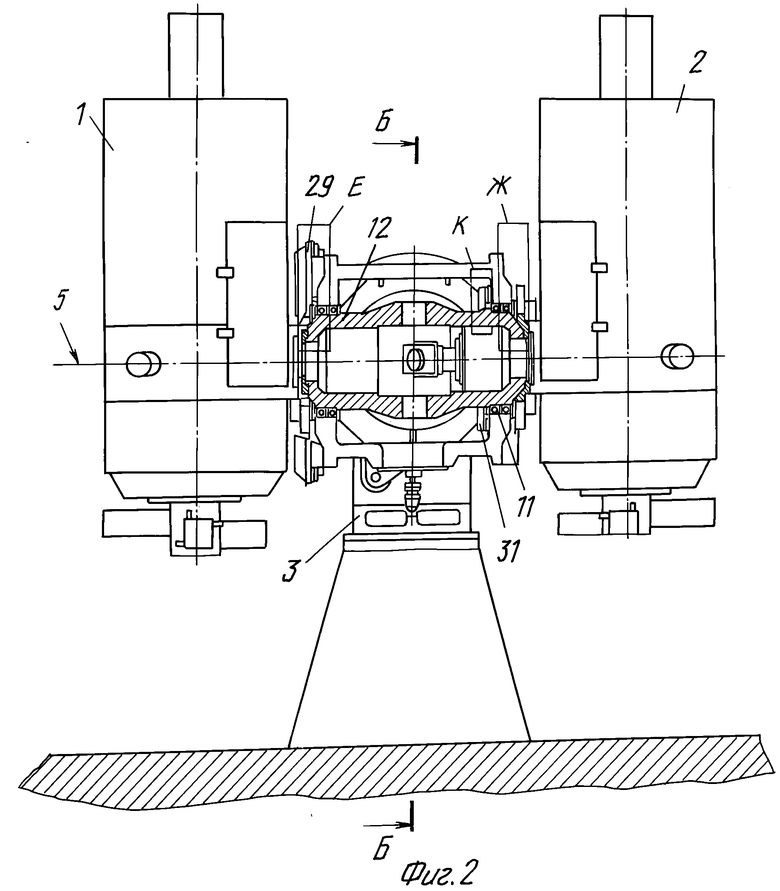
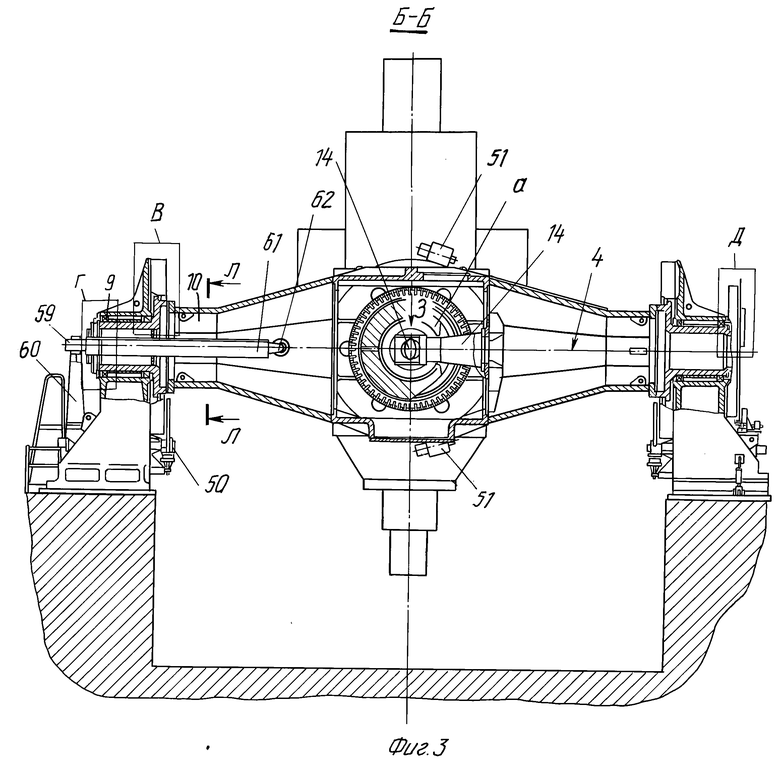
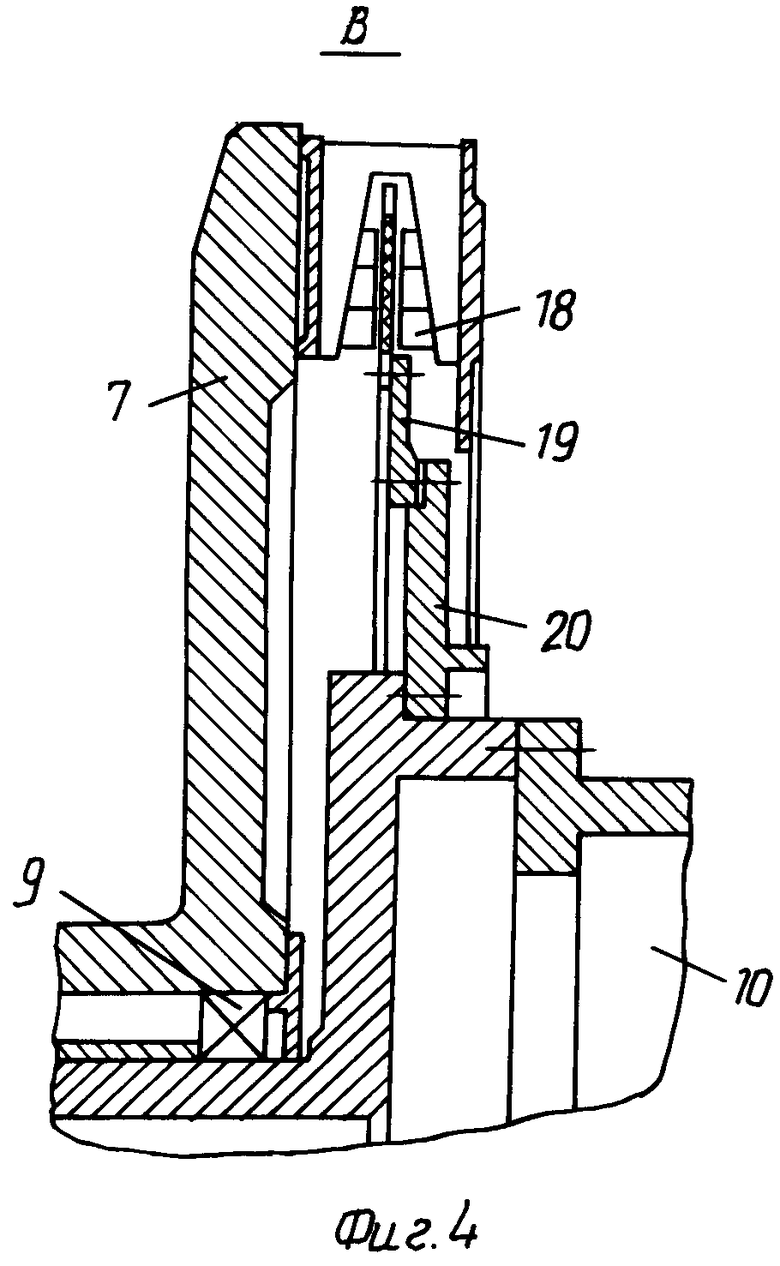
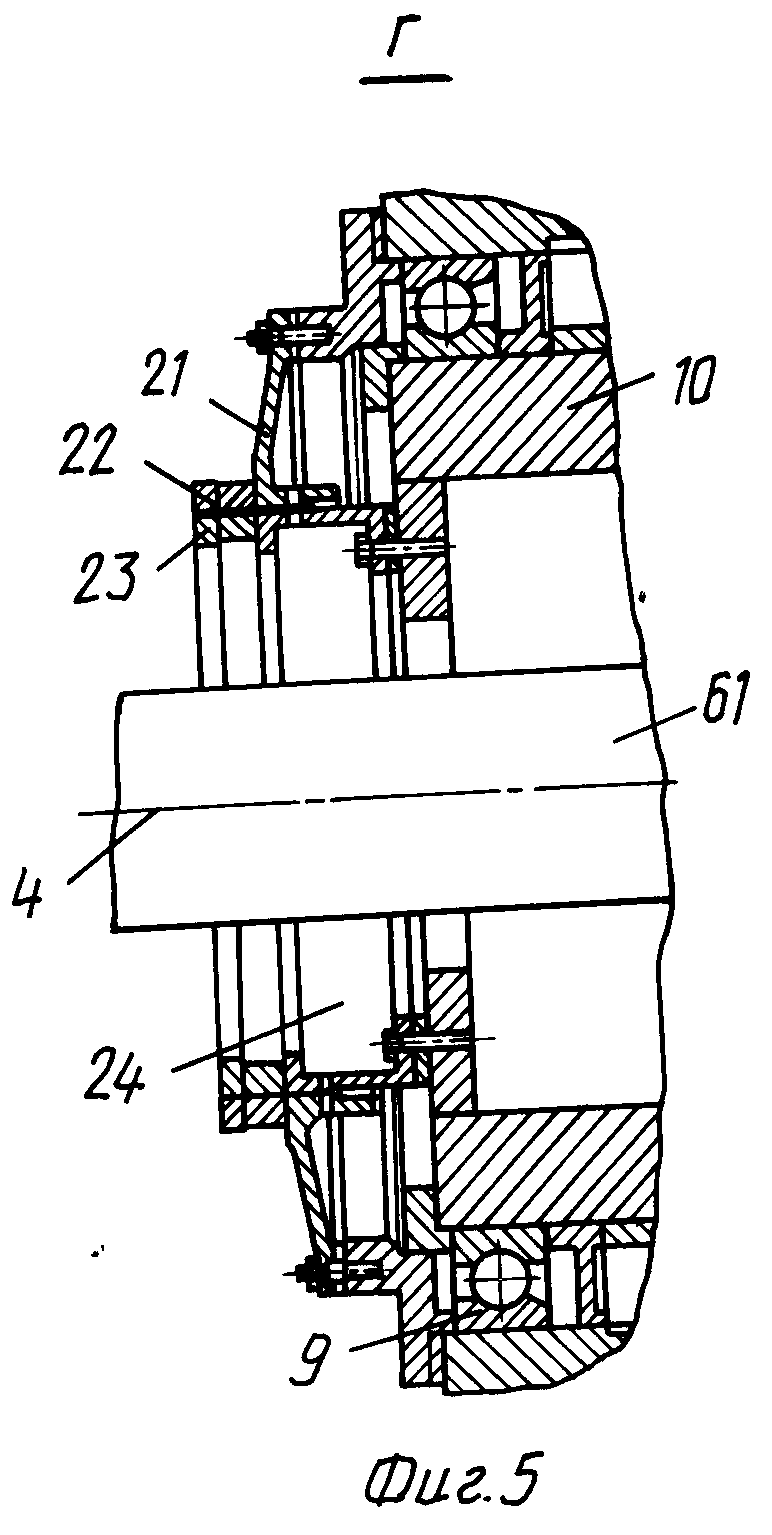
На фиг. 1 схематически показан общий вид предлагаемого оптического устройства; на фиг. 2 - оптическое устройство, разрез А-А на фиг. 1; на фиг. 3 - оптическое устройство, разрез Б-Б на фиг. 2; на фиг. 4 - устройство крепления моментного двигателя, элемент В на фиг. 3; на фиг. 5 - устройство крепления датчика положения по углу первого вала, элемент Г на фиг. 3; на фиг. 6 - устройство крепления датчика скорости первого вала, элемент Д на фиг. 3; на фиг. 7 - устройство крепления моментных двигателей привода вращения второго вала, элементы Е, Ж на фиг. 2; на фиг. 8 - устройство крепления датчика скорости второго вала, элемент К на фиг. 2; на фиг. 9 - устройство крепления зеркала и датчика положения по углу второго вала, вид З на фиг. 3; на фиг. 10 - устройство крепления датчика положения по углу второго вала, элемент И на фиг. 9; на фиг. 11 - узел опирания опоры со средством для компенсации температурных деформаций опорно-поворотного устройства, разрез П-П на фиг. 1; на фиг. 12 - буферное устройство, разрез Л-Л на фиг. 3; на фиг. 13 - устройство крепления торсионного вала с двуплечим рычагом, разрез М-М на фиг. 12; на фиг. 14 - гидравлический демпфер, элемент Н на фиг. 12.
Оптическое устройство содержит взаимно параллельные оптические блоки 1, 2, смонтированные на опорно-поворотном устройстве 3 со взаимно ортогональными осями вращения (наведения) 4, 5. На основании 6 опорно-поворотного устройства 3 установлены опоры 7 и 8, в которых с возможностью вращения в подшипниках 9 установлен полый вал 10. В корпусе вала 10 с возможностью вращения в подшипниках 11 установлен второй полый вал 12. Последний установлен с образованием свободных концов, на торцах которых жестко закреплены оптические блоки соответственно 1 и 2. Валы 10 и 12 снабжены безредукторными приводами вращения относительно осей 4 и 5. Приводы вращения выполнены в вид моментных двигателей. В варианте осуществления изобретения каждый вал снабжен двумя моментными двигателями, датчиком положения по углу и датчиком скорости.
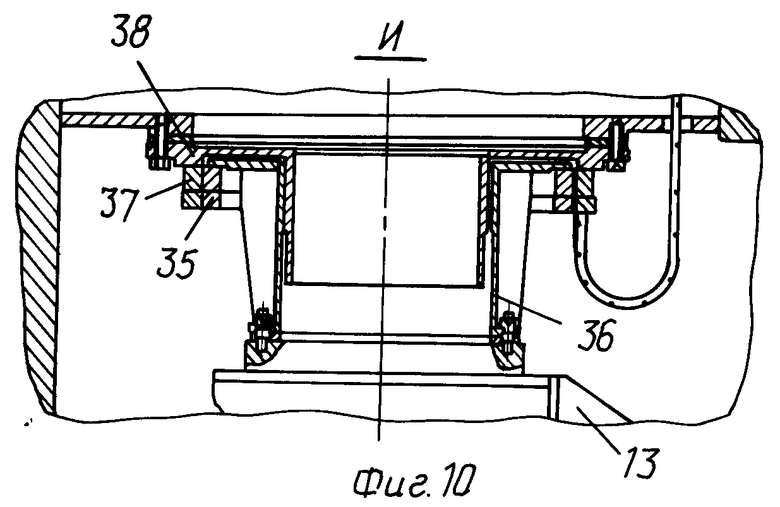
Внутри полого вала 10 в месте пересечения осей наведения 4, 5 на опоре 13 установлено плоское зеркало 14 с устройством регулировки (коррекции) его положения (на чертеже не показано). При этом зеркало размещено внутри вала 12, для чего в корпусе последнего выполнен вырез "а". В месте выреза стенка корпуса вала 12 имеет увеличенное сечение для обеспечения необходимой жесткости вала. Зеркало 14 отражает направленный вдоль оси вала 12 световой пучок от оптического блока 1 и через вырез "а" направляет его вдоль оси вала 10 к неподвижной оптической (оптико-электронной) аппаратуре (на чертеже не показана). Эта аппаратура представляет собой объектив, а в случае направления в сторону наблюдаемого объекта светового луча большой мощности - источник световой энергии.
Наведение по оси 4 обеспечивается двумя моментными двигателями 15, датчиком положения по углу 16 и датчиком скорости 17. Моментные двигатели расположены по концам вала 10 с внутренней стороны опор 7, 8. Статор 18 каждого моментного двигателя 15 закреплен на фланце соответствующей опоры, а ротор 19 с помощью разъемного соединения соединен с соответствующим переходником 20, выполненном на корпусе вала 10. Датчики 16 и 17 расположены по концам вала 10 с внешней стороны опор 7, 8. Опора 7 со стороны конца вала 10 выполнена с переходником 21, на котором закреплен статор 22 датчика положения по углу. Ротор 23 этого датчика с помощью разъемного соединения через переходник 24 соединен с корпусом вала 10. В варианте осуществления изобретения переходник 21 закреплен на крышке подшипника 9, установленного в опоре 7. На другом конце вала 10 через переходник 25 закреплен ротор 26 датчика скорости. Статор 27 этого датчика закреплен на переходнике 28, который в варианте осуществления изобретения одновременно служит крышкой подшипника 9, установленного в опоре 8.
Наведение по оси 5 обеспечивается двумя моментными двигателями 29, датчиком положения по угле 30 и датчиком скорости 31. Моментные двигатели расположены по концам вала 12, каждый - между одним из оптических блоков 1, 2 и корпусом вала 10. Статор 32 каждого моментного двигателя 29 закреплен на корпусе вала 10, а ротор 33 с помощью разъемного соединения через соответствующий переходник 34 соединен с выступающим из корпуса вала 10 свободным концом вала 12. Датчик положения по углу 30 размещен внутри полого вала 12. При этом статор 35 этого датчика через переходник 36 установлен на закрепленной на валу 10 опоре 13, а соответствующий ротор 37 через переходник 38 с помощью разъемного соединения соединен с валом 12. Датчик скорости 31 установлен внутри корпуса полого вала 10 у одной из опор вала 12. Ротор 39 этого датчика через переходник 40 установлен на валу 12, а статор 41 закреплен на переходнике 42, который в варианте осуществления изобретения одновременно служит крышкой подшипника 11, установленного в корпусе полого вала 10.
Между основанием 6 и полым валом 10, а также между полыми валами 10 и 12, установлены устройства фиксации их взаимного положения. В варианте исполнения изобретения устройство фиксации выполнено фрикционным. Устройство фиксации положения вала 10 относительно основания 6 включает закрепленный на торце вала 10 тормозной диск 43, а устройство фиксации положения вала 12 относительно корпуса вала 10 включает тормозной сектор 44, закрепленный на переходнике 34, выполненном на валу 12. Упомянутые тормозной диск и тормозной сектор взаимодействуют с тормозными устройствами, установленными соответственно на закрепленной на основании 6 опоре 8 и на корпусе вала 10 (на чертеже не показаны). В качестве тормозных устройств могут быть использованы, например, электромагнитные устройства, работающие на принципе создания момента сил трения в месте их контакта с тормозным диском или сектором.
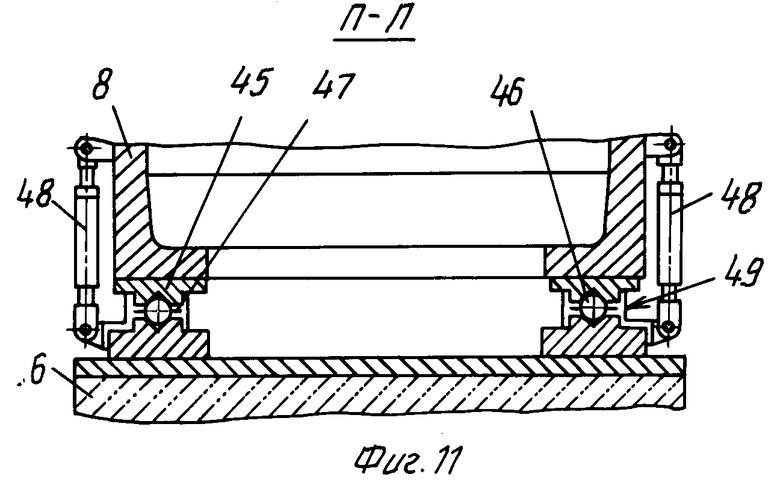
Опора 8 снабжена средством для компенсации температурных деформаций. Необходимость в подобном средстве вызвана тем, что при большом расстоянии между опорами 7 и 8 разница между величинами температурных деформаций металлоконструкции опорно-поворотного устройства и железобетонного основания 6 может достигать нескольких мм (например, при расстоянии 8-10 м эта разница достигает 2 мм), что может привести к заклиниванию подшипников 9 или к повышенному моменту сопротивления вращению вала 10.
В варианте осуществления изобретения средство для компенсации температурных деформаций опорно-поворотного устройства и основания реализуется следующим образом: опора 8 на основании 6 установлена посредством двух пар призматических направляющих 45, между которыми размещены шары 46, расположенные в сепарирующих обоймах 47. Призматические направляющие установлены параллельно оси вала 10. При этом стойка 8 связана с основанием 6 с помощью вертикально расположенных тяг в виде талрепов 48, которые не препятствуют перемещению стойки 8 посредством направляющих 45 при температурных деформациях опорно-поворотного устройства и основания. Для защиты шаров 46 от загрязнения предусмотрен кожух 49.
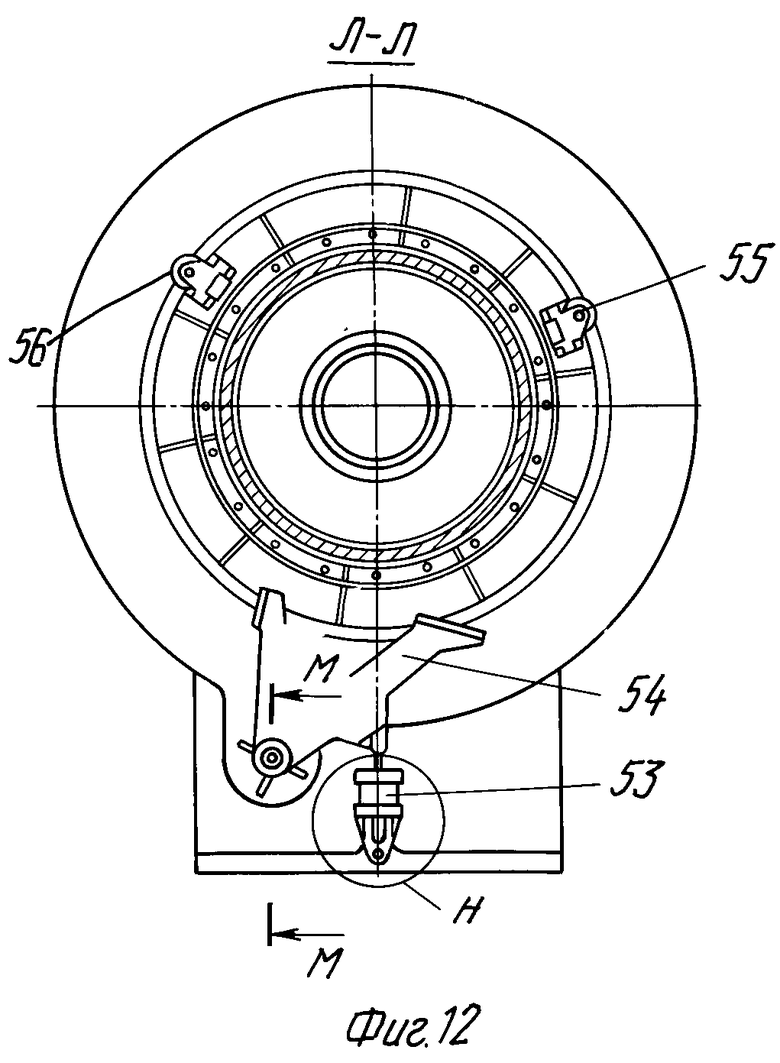
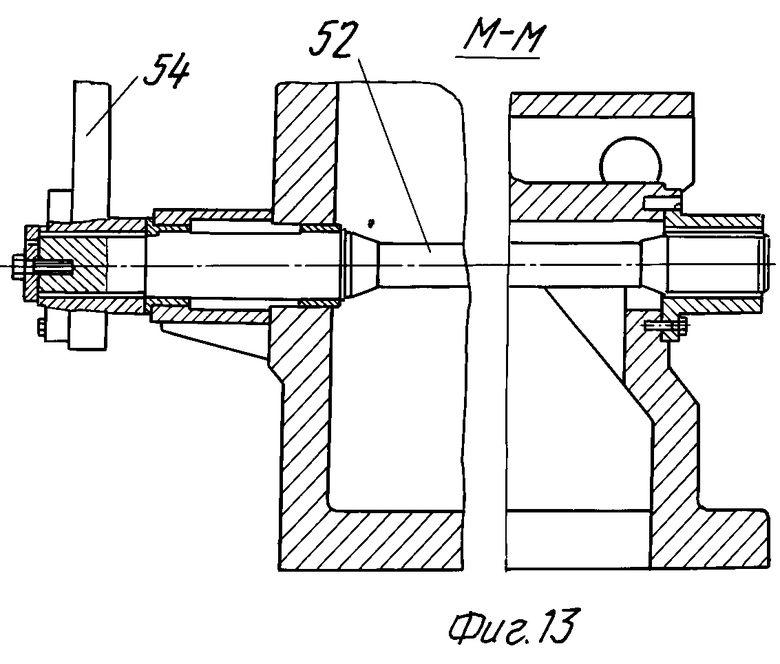
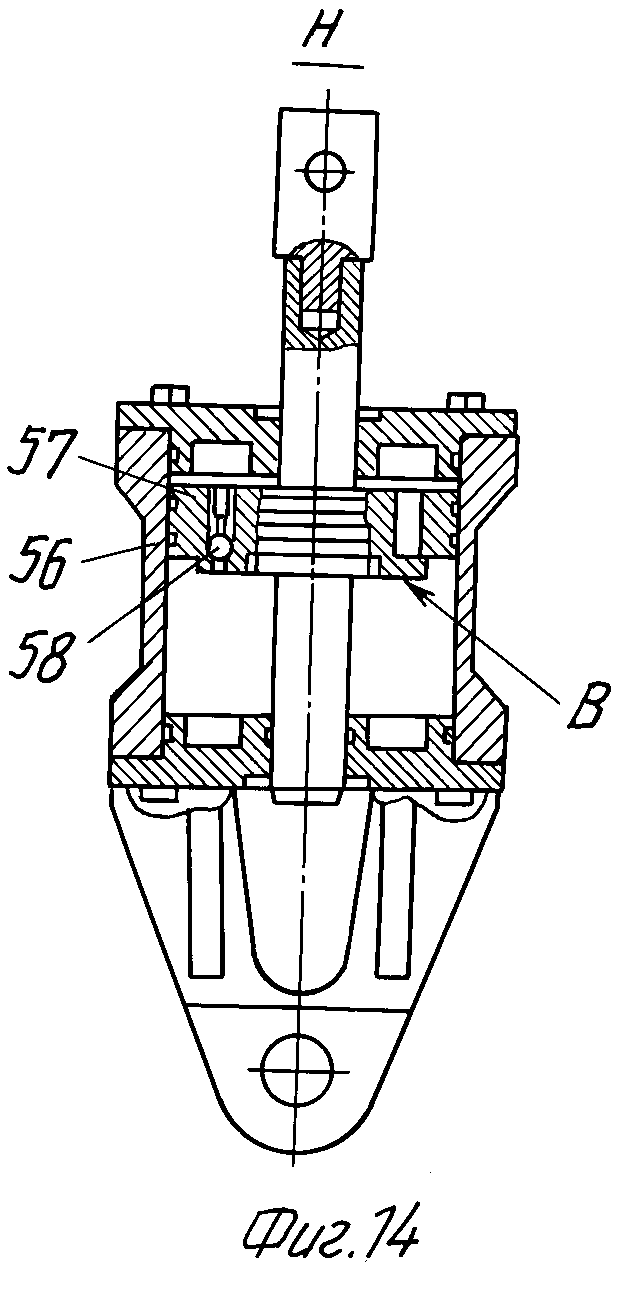
Вместе с этим между закрепленными на основании 6 опорами 7, 8 и полым валом 10, а также между полыми валами 10 и 12, установлены буферные устройства 50, 51 для безударного торможения и остановки поворотных частей на предельных углах наведения в случае аварийной ситуации при несрабатывании концевых выключателей (на чертеже не показаны) приводов вращения. Каждая ось наведения снабжена двумя буферными устройствами. Буферное устройство 50 выполнено в виде закрепленных на соответствующей опоре 7, 8 торсионного вала 52 и гидравлического демпфера 53, кинематически связанных между собой с помощью закрепленного на упомянутом торсионном валу двуплечего рычага 54, взаимодействующего с упорами 55, выполненными на валу 10. В варианте осуществления изобретения гидравлический демпфер 53 содержит гидроцилиндр 56 с поршнем 57, в котором выполнен обратный клапан 58 и дросселирующие отверстия "в". Буферные устройства 51 установлены на корпусе полого вала 12 и выполнены в виде пружинно-гидравлических устройств, взаимодействующих с упорами, выполненными на корпусе полого вала 10 (на чертеже не показаны).
Опорно-поворотное устройство 3 снабжено кабелепереходом 59 с основания 6 на полый вал 10, а также кабелепереходом с полого вала 10 на полый вал 12. Кабелепереход 59 выполнен в виде закрепленной на стойке 60, установленной на основании 6, трубы 61, через которую пропущен кабельный жгут 62. Труба 61 пропущена через отверстие в датчике положения по углу 16, корпус полого вала 10 и расположена соосно оси вращения последнего. Второй кабелепереход выполнен в виде свободно висящих кабельных петель 63.
В варианте осуществления изобретения оптический блок 1 включает несколько оптико-электронных устройств, обеспечивающих прием и передачу оптического сигнала на различных каналах, например, телевизионных, инфракрасных, лазерных, а также преобразование оптического сигнала в удобную форму. Оптический блок 2 содержит оптико-электронные устройства, обеспечивающие только прием оптического сигнала.
Оптическое устройство работает следующим образом.
Наведение (слежение) оптических блоков 1, 2 на наблюдаемый объект может производиться раздельно или одновременно по осям 4, 5. Моментные двигатели 15, 29 безредукторных приводов вращения обеспечивают поворот подвижных частей опорно-поворотного устройства 3, а также удержание поворотных частей на любом угле наведения при включенном питании двигателей. При этом одновременно подается питание и на тормозные устройства фиксации взаимного положения основания 6 и полого вала 10, а также - взаимного положения полых валов 10 и 12. При подаче питания на тормозные устройства растормаживаются тормозной диск 43, тормозной сектор 44 и обеспечивается возможность поворота соответствующей поворотной части (вала) опорно-поворотного устройства.
При обесточивании моментных двигателей одновременно обесточиваются соответствующие тормозные устройства и осуществляется постоянное торможение тормозного диска 43 или тормозного сектора 44 и соответственно связанной с ним поворотной части (вала) опорно-поворотного устройства.
При наведении оптического устройства датчики обратной связи 16, 17 и 30, 31 положения по углу и скорости, установленные непосредственно на валах 10, 12 обеспечивают выдачу сигналов о фактических величинах углов поворота, а также о скорости валов 10, 12 в управляющую ЭВМ (на чертеже не показана), которая формирует сигнал управления привода наведения.
В случае аварийной ситуации при несрабатывании на предельных углах концевых выключателей приводов вращения соответствующие буферные устройства 50, 51 обеспечивают безударное торможение и остановку поворотных частиц. Например, в случае возникновения аварийной ситуации при вращении относительно сои 4 в результате взаимодействия упора 55 с двуплечим рычагом 54 кинетическая энергия поворотной части поглощается торсионным валом 52. При закручивании торсионного вала поршень 57 демпфера 53 перемещается вниз. Под давлением жидкости открывается обратный клапан 58, и рабочая жидкость из нижней полости гидроцилиндра 56 перетекает в его верхнюю полость. При раскручивании торсионного вала поршень 57 перемещается вверх, закрывается клапан 58, и рабочая жидкость в гидроцилиндре перетекает в обратном направлении через дросселирующие отверстия "в". Таким образом, происходит поглощение энергии отдачи торсионного вала 52.
В случае различных температурных деформаций опорно-поворотного устройства 3 и основания 6 шары 46 обеспечивают линейные перемещения опоры 8 относительно основания 6. При этом вертикально установленные талрепы 48 не препятствуют указанному перемещению и в то же время обеспечивают необходимую жесткость опорного узла упомянутой опоры.
Таким образом, благодаря особенности исполнения оптического устройства изобретение позволяет повысить общую жесткость монтировки, при этом установка моментных двигателей, а также датчиков обратной связи положения валов по углу и датчиков обратной связи скорости валов непосредственно на исполнительных осях позволяет существенно повысить точность наведения устройства, в том числе, и за счет отсутствия в цепи наведения зубчатых передач.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2111519C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166783C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2187137C2 |
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| МОБИЛЬНОЕ, ПРЕИМУЩЕСТВЕННО ОПТИЧЕСКОЕ, УСТРОЙСТВО | 1998 |
|
RU2145136C1 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО С СИММЕТРИЧНОЙ МОНТИРОВКОЙ | 2001 |
|
RU2213363C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| ОПОРНОЕ УСТРОЙСТВО | 1996 |
|
RU2112262C1 |
Оптическое устройство относится к оптическому приборостроению. Оптическое устройство содержит взаимно параллельные оптические блоки (ОБ) (1, 2), смонтированные на опорно-поворотном устройстве (ОПУ) (3) со взаимно ортогональными осями вращения (5) и на котором закреплены опоры, в которых с возможностью вращения установлен первый полый вал (ППВ), геометрическая ось которого неподвижна. На ППВ в соосных опорах с возможностью вращения относительно оси, ортогональной оси ППВ, установлен второй полый вал (ППВ) (12) с жестко закрепленными на нем ОБ (1, 2). В месте пересечения осей наведения на опоре, консольно закрепленной внутри корпуса ППВ, установлено зеркало. Устройство содержит средство для компенсации температурных деформаций. Устройство позволяет повысить общую жесткость монтировки и повысить точность наведения устройства. 4 з.п. ф-лы, 14 ил.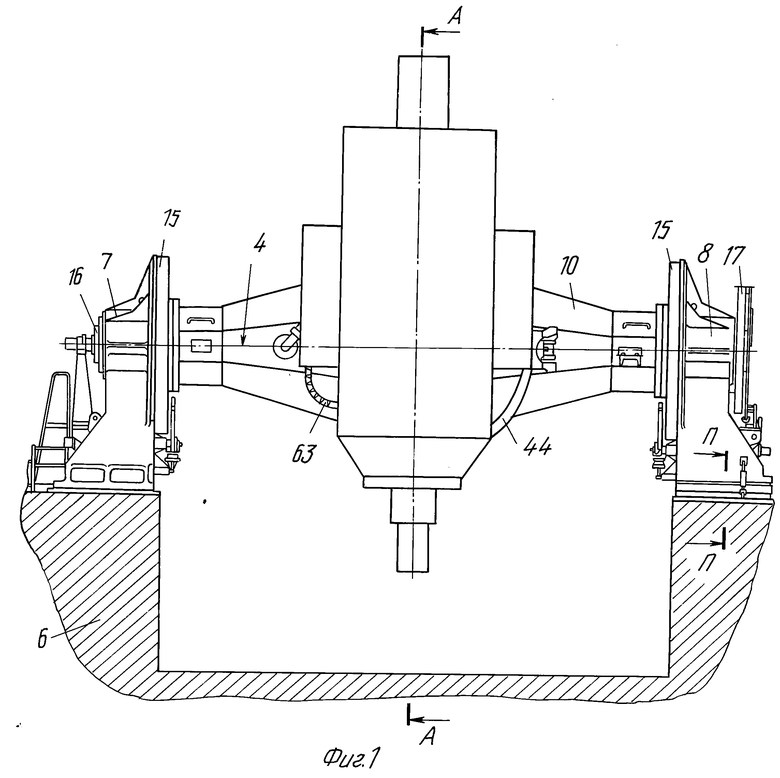
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, 1708165, A, 23.01.92 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, 717692, A, 27.02.80. | |||
