(5) УСТРОЙСТВО ДЛЯ ПОЛУАВТОМАТИЧЕСКОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПРИВОДОМ ПУТЕВОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА ДЛЯ ПУТЕВОЙ МАШИНЫ | 2012 |
|
RU2500939C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| Устройство для двухпутной полуавтоматической блокировочной сигнализации | 1939 |
|
SU67784A1 |
| Система автоматического переключения ступеней скорости гидравлической передачи транспортной машины | 1982 |
|
SU1129086A1 |
| РЕВЕРС-РЕДУКТОР | 1991 |
|
RU2010139C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ РАБОЧЕЙ СКОРОСТИ ПУТЕВОЙ МАШИНЫ | 1997 |
|
RU2128122C1 |
| Система управления снегоуборочным поездом | 2024 |
|
RU2821695C1 |
| ЛОКОМОТИВ | 1998 |
|
RU2133203C1 |
| Способ восстановления движения поездов на участке железной дороги с использованием мобильного комплекса микропроцессорной системы управления стрелками и светофорами | 2016 |
|
RU2622316C1 |
| Вагонотолкатель железнодорожных вагонов (варианты) | 2020 |
|
RU2747168C1 |
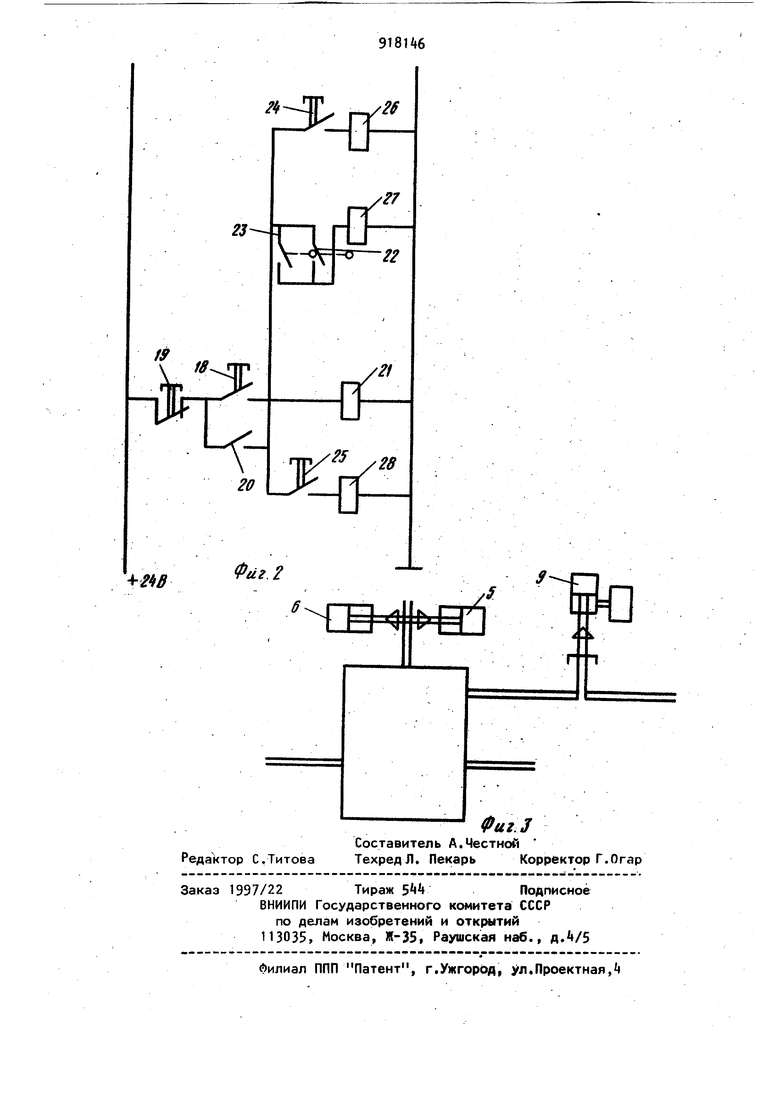
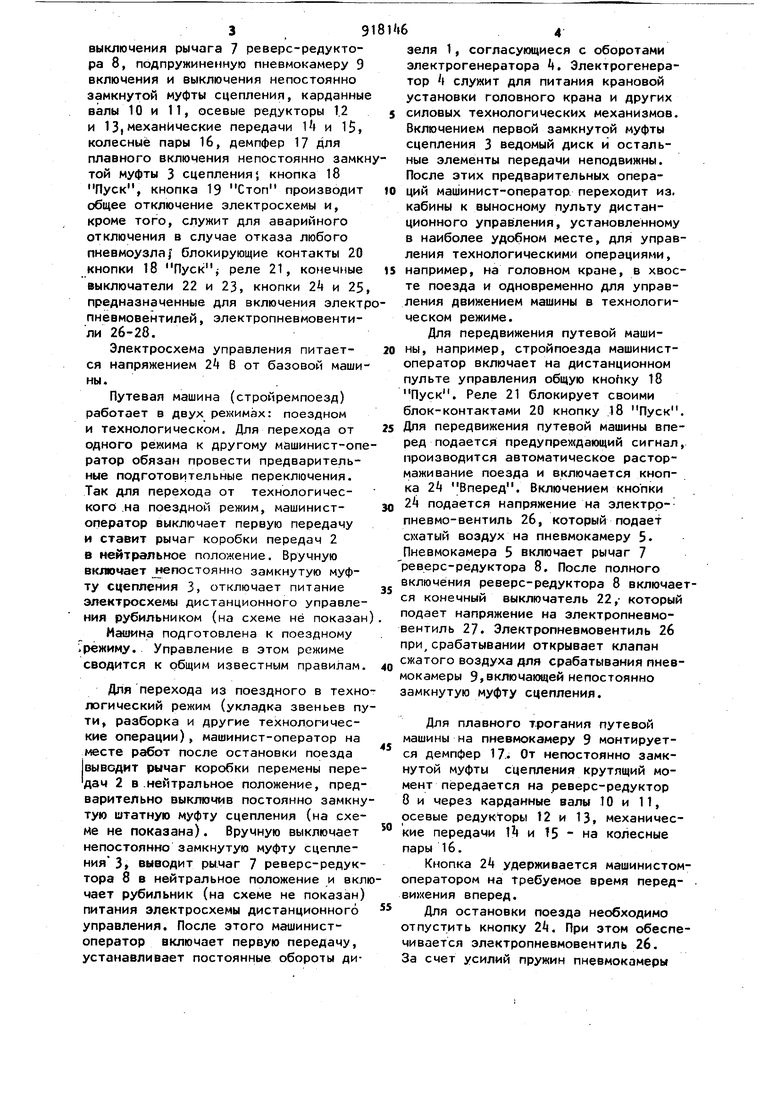
Изобретение относится к путевым железнодорожным машинам с дистанцион ным управлением сухими фрикционными муфтами сцепления. Известно устройство для полуавтоматического дистанционного управлени приводом путевой машины, содержащее непостоянно замкнутую сухую муфту сцепления, расположенную между короб кой перемены передач и реверс-редукт Г ч ром 1j. Однако это устройство при управлении движением строительно-ремонтного поезда в технологическом режиме требует наличия силового электродвигателя с аппаратурой управления, червячного редуктора, цепных nepieдач, и т.п., что усложняет конструкцию, делает, устройство ненадежным в работе и требует дополнительных затрат на монтахшо-восстановчтельные работы. Целью изобретения является повышение надежности. Достигается эта цель тем, что устройство снабжено дополнительной сухой непостоянно замкнутой муфтой сцепления, расположенной между дизелем и реверс-редуктором и кинемйтически связанной с толкателем пневмокамеры с гидравлическим демпфером и дoпpлниYeльным пневмоприводом,. взаимодействующим с рычагом включения-выключения реверс-редуктора. На фиг. 1 изобра хена кинематическая схема привода путевой -машины; на фиг.2 - электрическая схема дистанционного управления приводом путевой машины в технологическом режиме работы, например, при укладке звеньев железнодорожного пути; на фиг.З привод включения.-выключения реверсредуктора.. Устройство содержит дизель 1, коробку перемены передач 2, непостоянно замкнутую муфту сцепления 3, электрогенератор «, подпружиненные пневмокамеры 5 и 6, включения и
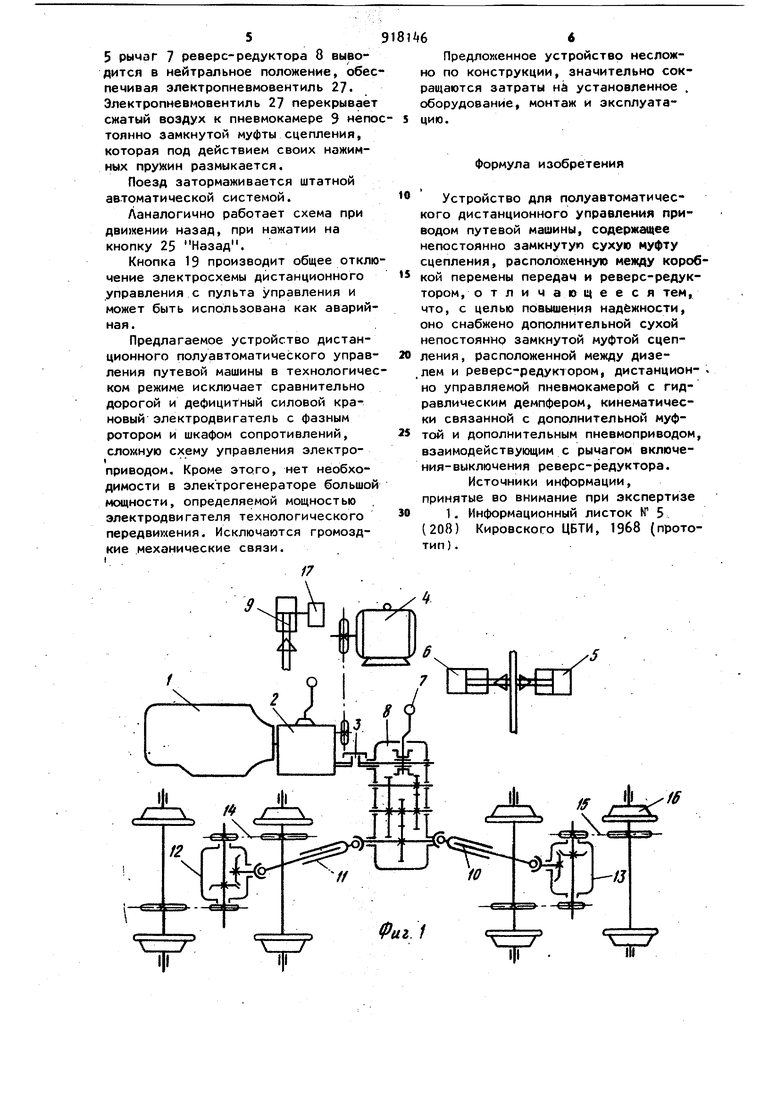
выключения рычага 7 реверс-редуктора 8, подпружиненную пневмокамеру 9 включения и выключения непостоянно замкнутой муфты сцепления, карданные валы 10 и 11, осевые редукторы 1.2 и 13, механические передачи 1f и 15, колесные пары 16, демпфер 17 для плавного включения непостоянно замкнтой муфты 3 сцепления , кнопка 18 Пуск, кнопка 19 Стоп производит общее отключение электросхемы и, кроме того, служит для аварийного отключения в случае отказа любого пневмоузла/ блокирующие контакты 20 кнопки 18 Пуск реле 21, конечные выключатели 22 и 23, кнопки 2А и 25, предназначенные для включения электрпневмовентилей, электропневмовентили 26-28.
Электросхема управления питается напряжением В от базовой машины.
Путевая машина (стройремпоезд) работает в двух режимах: поездном и технологическом. Для перехода от одного режима к другому машинист-оператор обязан провести предварительные подготовительные переключения. Так для перехода от технологического ,на поездной режим, машинистоператор выключает первую передачу и ставит рычаг коробки передач 2 в нейтральное положение. Вручную включает непостоянно замкнутую муфту сцепления 3, отключает питание электросхемы дистанционного управления рубильником (на схеме не показан
Иашина подготовлена к поездному .режиму. Управление в этом режиме сводится к общим известным правилам.
Для перехода из поездного в технологический режим (укладка звеньев пути, разборка и другие технологические операции), машинист-оператор на месте работ после остановки поезда выводит рычаг коробки перемены передач 2 в .нейтральное положение, предварительно выключив постоянно замкнутую штатную муфту сцепления (на схеме не показана). Вручную выключает непостоянно замкнутую муфту сцепления 3 выводит рычаг 7 реверс-редуктора 8 в нейтральное положение и вклчает рубильник (на схеме не показан) питания электросхемы дистанционного управления. После этого машинистоператор включает первую передачу, устанавливает постоянные обороты дизеля 1, согласующиеся с оборотами электрогенератора А. Электрогенератор f служит для питания крановой установки головного крана и других силовых технологических механизмов. Включением первой замкнутой муфты сцепления 3 ведомый диск и остальные элементы передачи неподвижны. После этих предварительных операций машинист-оператор переходит из. кабины к выносному пульту дистанционного управления, установленному в наиболее удобном месте, для управления технологическими операциями, например, на головном кране, в хвосте поезда и одновременно для управления движением машины в технологическом режиме.
Для передвижения путевой машины, например, стройпоезда машинистоператор включает на дистанционном пульте управления общую кнопку 18 Пуск, Реле 21 блокирует своими блок-контактами 20 кнопку 18 Пуск. Для передвижения путевой машины вперед подается предупрехадающий сигнал, производится автоматическое растормаживание поезда и включается кнопка 2Ц Вперед. Включением кнопки подается напряжение на электрр-пневмо-вентиль 26, который подает охатый воздух на пневмокамеру 5. Пневмокамера 5 включает рычаг 7 реверс-редуктора 8. После полного включения ревере-редуктора 8 включаеся конечный выключатель 22,- который подает напряжение на электропневмовентиль 27. Электропневмовентиль 26 при,срабатывании открывает клапан сжатого воздуха для срабатывания пневмокамеры 9,включающей непостоянно замкнутую муфту сцепления.
Для плавного трогания путевой машины на пневмокамеру 9 монтируется демпфер 17.. От непостоянно замкнутой муфты сцепления крутящий момент передается на реверс-редуктор 8 и через карданные валы 10 и 11, осевые редукторы 12 и 13, механические передачи 1 и Т5 - на колесные пары 16.
Кнопка 2k удерживается машинистомоператором на Требуемое время передвижения вперед.
Для остановки поезда необходимо отпустить кнопку 2. При этом обеспечивается Электропневмовентиль 26. За счет усилий пружин пневмокамеры
5 рычаг 7 реверс-редуктора 8 выводится в нейтральное положение, обеспечивая электропневмовеитиль 27. Электропневмовентиль 27 перекрывает сжатый воздух к пневмокамере 9 непотоянно замкнутой муфты сцепления, которая под действием своих нажимных пружин размыкается.
Поезд затормаживается штатной автоматической системой.
Ланалогимно работает схема при движении назад, при нажатии на кнопку 25 Назад.
Кнопка 19 производит общее отключение электросхемы дистанционного управления с пульта управления и может быть использована как аварийная .
Предлагаемое устройство дистанционного полуавтоматического управления путевой машины в технологическом режиме исключает сравнительно дорогой и дефицитный силовой крановый электродвигатель с фазным ротором и шкафом сопротивлений,
сложную схему управления электро
приводом. Кроме этого, нет необходимости в электрогенераторе большой мощности, определяемой мощностью электродвигателя технологического передвижения. Исключаются громоздкие механические связи.
Предлох енное устройствр несложно по конструкции, значительно сокращаются затраты нд установленное . оборудование, монтаж и эксплуатацию.
Формула изобретения
Устройство для полуавтоматического дистанционного управления приводом путевой машины, содержащее непостоянно замкнутую сухую муфту сцепления, располоухенную меиаду коробкой перемены передач и реверс-редуктором ,отличаю1цееся тем, что, с целью повышения надёжности, оно снабжено дополнительной сухой непостоянно замкнутой муфтой сцепления, расположенной между дизелем и реверс-редуктором, дистанционно управляемой пневмокамерой с гидравлическим демпфером, кинематически связанной с дополнительной муфтой и дополнительным пневмоприводом, взаимодействующим с рычагом включения-выключения реверс-редуктора.
Источники информации, принятые во внимание при экспертизе
1, Информационный листок N 5 (208) Кировского ЦБТИ, 1968 (прототип).
j--r.V
022
Фиг. 2
-«-Л
