Изобретение относится к области железнодорожного транспорта, а именно к дистанционному управлению фиксаторами для закрепления подвижного состава.
Автоматизированная система управления устройствами закрепления подвижного состава (поезда) предназначена для дистанционного управления устройствами (фиксаторами), закрепляющими поезд на приемоотправочных путях железнодорожной станции. К таким устройствам относятся любые стационарные механизированные устройства с электрическим, пневматическим, гидравлическим или механическим приводом.
В настоящее время известны и широко применяются следующие стационарные механизированные устройства для закрепления поезда:
- упор тормозной стационарный типа УТС-380 (Кобзев В.А. Развитие технических средств обеспечения безопасности станционных процессов. Учебное пособие. - М.: МИИТ, 2008 - 57 С. - п. 2.2.1), представляющий собой двухрельсовую конструкцию, воздействующую на круг катания одной колесной пары закрепляемого вагона;
- стационарное устройство для закрепления составов на станционных путях (патент RU 2086447 C1 B61K 7/02, B61K 7/16, опубл. 10.08.1997), содержащее расположенный внутри колеи упругий клин, образованный двумя тормозными шинами, и обращенный своим острием навстречу накатываемой колесной паре;
- устройство для закрепления подвижного состава (патент RU 2122502 C1 B61K 7/16, опубл. 27.11.1998), содержащее смонтированные внутри колеи привод и раму с подвижно закрепленной на ней кареткой, связанной с приводом посредством тяги.
Управление известными стационарными устройствами для закрепления поезда в настоящее время осуществляют следующим образом (http://flatik.ru/razvitie-tehnicheskih-sredstv-obespecheniya-bezopasnosti-dvije-index-2; http://otherreferats.allbest.ru/transport/00322040_1.html). Машинист останавливает поезд (подвижной состав) по команде сигналиста. Сигнал о наличии колеса в зоне закрепления поступает дежурному по станции (ДСП) от сигналиста либо при помощи конечных выключателей, связанных с лыжами (шинами) некоторых стационарных устройств. Получив сигнал о наличии колеса в зоне закрепления стационарного устройства, дежурный по станции либо сам производит закрепление поезда со своего пульта, либо дает команду сигналисту на разрешение закрепления состава, при этом на маневровой колонке загорается лампочка «Закрепление», и, сигналист переводит выключатель на маневровой колонке в положение «Закрепление». В любом случае закрепление проводится под визуальным контролем сигналиста. Отцепка локомотива от состава производится по команде ДСП после получения им сообщения сигналиста об окончании закрепления состава. Раскрепление состава осуществляется сигналистом по команде дежурного по станции либо дежурным по станции при условии визуального контроля сигналистом.
Отсутствие автоматизации в известном способе управления устройствами для закрепления поезда приводит к следующим серьезным недостаткам:
- нахождение сигналиста на путях во время процесса закрепления поезда создает угрозу его жизни;
- низкая производительность труда из-за продолжительности процесса закрепления;
- высокие трудозатраты из-за увеличенного количества ручного труда.
Исходя из проведенных патентных исследований, автоматизированные системы управления устройствами закрепления поезда на момент подачи заявки на изобретение - неизвестны.
Техническая задача изобретения - создание автоматизированной системы управления устройствами закрепления поезда, обеспечивающей возможность остановки поезда машинистом в необходимом месте приемоотправочного пути без присутствия сигналиста в опасной зоне и на путях.
Технический результат изобретения - повышение безопасности технологического процесса, снижение трудозатрат, повышение производительности труда.
Для решения технической задачи и достижения указанного технического результата в автоматизированной системе управления устройствами закрепления поезда, содержащей подсистему связи с маневровой колонкой и пультом управления, расположенным у дежурного по станции, согласно изобретению, в систему включены связанные с пультом управления и между собой: по меньшей мере, один единый контроллер, подсистема управления устройствами закрепления, подсистема прицельной остановки поезда, снабженная пунктом определения колесной пары и пунктами определения длины состава, путевыми ретрансляторами сигналов и устройствами отображения, подсистема электропитания, устройства электрической централизации и цепи увязки с ними, при этом подсистема связи дополнительно снабжена диагностическим устройством отображения.
Пункт определения колесной пары и пункты определения длины состава содержат пункты счета осей.
Сущность изобретения поясняется схемой.
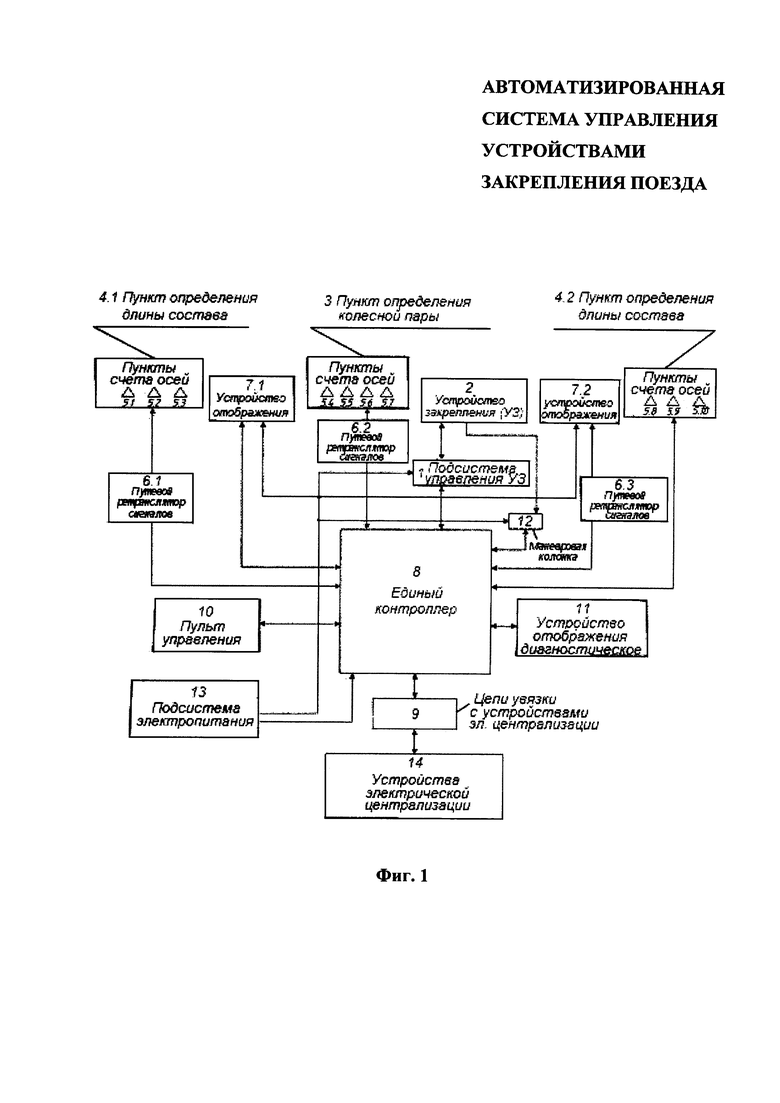
На фиг. 1 представлена функциональная схема автоматизированной системы управления устройствами закрепления поезда; на фиг. 2 представлен пульт управления устройствами автоматизированной системы управления.
В состав автоматизированной системы управления устройствами закрепления поезда (фиг. 1) входят:
- подсистема управления 1 устройством закрепления 2;
- подсистема прицельной остановки поезда с пунктом определения колесной пары 3, с пунктами определения длины состава 4.1-4.2, пунктами счета осей 5.1-5.10, путевыми ретрансляторами сигналов 6.1-6.3 и устройствами отображения 7.1-7.2;
- единый контроллер 8;
- цепи увязки 9 с устройствами релейной или микропроцессорной электрической централизации 14;
- подсистема связи с пультом управления 10, устройством отображения диагностическим 11 и маневровой колонкой 12;
- подсистема электропитания 13.
Подсистема управления 1 устройством закрепления 2 (фиг. 1) предназначена для управления электроприводами устройства закрепления и выполнения следующих функций:
- перевод устройства закрепления 2 в верхнее или нижнее положение при получении соответствующей команды от единого контроллера 8;
- выключение питания электроприводов устройства закрепления 2 при подаче дежурного по станции команды на аварийное отключение;
- контроль верхнего и нижнего положений устройства закрепления 2 и передача соответствующей информации на единый контроллер 8.
В состав подсистемы управления 1 устройством закрепления 2 для каждого пути входят (на фигурах не показаны):
- управляющие реле верхнего и нижнего положения, предназначенные для передачи команд от единого контроллера 8 (фиг. 1) в цепи управления электроприводами. В исходном состоянии реле верхнего и нижнего положения находятся без тока. При формировании единым контроллером 8 управляющей команды на перевод устройства закрепления 2 в верхнее или нижнее положение, соответствующее реле верхнего или нижнего положения встает под ток. Для каждого устройства закрепления 2 предусматриваются реле верхнего и нижнего положения;
- реле для отключения напряжения электропитания электродвигателей устройства закрепления 2, предназначенное для случая нажатия на пульте управления или маневровой колонке кнопки аварийной остановки;
- цепи управления электроприводами, которые необходимы для коммутации силовых цепей электродвигателей устройства закрепления 2. В состав цепей управления электроприводами входят пускатели верхнего и нижнего положения;
- цепи контроля верхнего и нижнего положения, в состав которых входят датчики контроля нижнего и верхнего положения. Датчики контроля нижнего и верхнего положения размещены непосредственно в устройстве закрепления 2 и предназначены для передачи в единый контроллер 8 информации о текущем положении устройства закрепления 2.
Все устройства подсистемы управления 1 устройством закрепления 2 (кроме датчиков контроля нижнего и верхнего положения) размещены на посту электрической централизации в специализированном шкафу.
Подсистема прицельной остановки поезда построена на основе применения напольной аппаратуры счета осей из состава устройств системы контроля состояния свободности станционных участков пути методом счета осей подвижного состава (КССП «Урал»). Подсистема прицельной остановки поезда необходима для обеспечения возможности остановки вагона поезда в требуемом месте, относительно закрепляющего устройства, и определения наличия соответствующей колесной пары в зоне закрепления.
В состав подсистемы прицельной остановки поезда входят:
- напольные устройства из состава системы КССП «Урал», включающие: а) пункты счета осей 5.1-5.10 (фиг. 1); б) путевые ретрансляторы сигналов 6.1-6.3.;
- устройства отображения 7.1-7.2.
Пункты счета осей 5.1-5.10 предназначены для получения первичной информации о количестве осей подвижного состава, проследовавших пункт счета, с учетом направления движения, а также для передачи полученной информации на единый контроллер 8.
В состав каждого пункта счета осей входят (на фигуре не показаны):
- путевой датчик (например, датчик путевой электромагнитный парный типа ДПЭП-М), предназначенный для формирования электрических сигналов специализированной формы в момент прохода над ним оси подвижного состава;
- блок напольного счетного устройства, предназначенный для обработки сигналов, формируемых путевым датчиком, подсчета проследовавших осей подвижного состава с учетом направления движения, и передачи полученной информации на единый контроллер 8. Кроме того, блок напольного счетного устройства контролирует исправность путевого датчика и его правильное положение относительно рельса;
- коробка соединительная, обеспечивающая разъемное соединение кабельных окончаний с блоком напольного счетного устройства;
- кабельная муфта, предназначенная для размещения блока напольного счетного устройства и коробки соединительной.
Путевой датчик и блок напольного счетного устройства соединены между собой с помощью специализированного кабеля, который является составной частью датчика. Кабельная муфта установлена в непосредственной близости от места расположения путевого датчика.
Для определения расстояния, которое должен пройти поезд до момента остановки закрепляемой оси в зоне закрепления, на каждом приемоотправочном пути, оборудованном устройствами закрепления, предусмотрен пункт определения колесной пары 3 в зоне закрепления, включающий пункты счета осей 5.4, 5.5, 5.6, 5.7.
Для определения длины подвижного состава, принимаемого на путь, оборудованный устройствами закрепления, на каждом приемоотправочном пути станции, предусмотрены пункты определения длины состава 4.1 и 4.2. Пункты определения длины состава 4.1 и 4.2 размещены на приемоотправочном пути на расстоянии не менее 100 м от крайнего пункта счета оси в составе пункта определения колесной пары 3.
В состав каждого пункта определения длины состава входит по три пункта счета.
Путевые ретрансляторы сигналов 6.1, 6.2 и 6.3 предназначены для подключения к единому контроллеру 8 удаленных пунктов счета осей. Путевые ретрансляторы сигналов должны применяться в том случае, если расчетная длина кабеля питания и связи до какого-либо пункта счета осей превышает 1000 м. При этом количество путевых ретрансляторов сигналов должно быть равно количеству полных километров расчетной длины кабеля. Место установки путевых ретрансляторов сигналов выбирается таким образом, чтобы длина каждой ветви кабеля питания и связи, примыкающей к путевым ретрансляторам сигналов, не превышала 1000 м.
Устройства отображения 7.1 и 7.2 предназначены для визуального отображения машинисту расстояния, оставшегося до момента остановки поезда. Устройство отображения установлено на мачте выходного светофора пути или на отдельной светофорной мачте.
Остановка поезда машинистом в требуемом месте осуществляется по показаниям устройств отображения. Информация на устройствах отображения и наличие колеса в зоне закрепления формируется подсистемой прицельной остановки поезда.
Единый контроллер 8 (фиг. 1) имеет модульное исполнение и размещен в специализированном шкафу управляющего вычислительным комплексом, установленного на посту электрической централизации, расположенном на железнодорожной станции.
Единый контроллер 8 предназначен для выполнения следующих функций:
- определение длины поезда на основе данных, получаемых от пунктов определения длины состава 4.1 и 4.2.;
- определения расстояния до остановки поезда, на основе рассчитанной длины поезда и данных, полученных от пункта определения колесной пары 3;
- передача на устройства отображения 7.1 и 7.2 данных о расстоянии до остановки поезда;
- контроль наличия/отсутствия установленного поездного маршрута приема на путь, оборудованный устройством закрепления 2;
- контроль наличия закрепляемой колесной пары в зоне закрепления на основе данных получаемых от пункта определения колесной пары 3;
- контроль текущего положения устройства закрепления 2 посредством обработки данных, получаемых от подсистемы связи;
- контроль наличия/отсутствия команды дежурного по станции на закрепление состава;
- контроль наличия/отсутствия команды дежурного по станции на переключение в режим «Вспомогательное управление»;
- контроль наличия/отсутствия команды дежурного по станции на переключение в режим «Нормализация» для каждого пути, оборудованного устройствами АСУЗП;
- управление работой реле верхнего и нижнего положения подсистемы управления 1 для каждого пути, оборудованного устройством закрепления 2;
- управление работой реле контроля нижнего положения (из состава цепей увязки 9 с устройствами электрической централизации 14);
- контроль наличия в электрозамке ключей местного управления для каждого пути;
- передача диагностической информации на устройство отображения диагностическое 11 подсистемы связи;
- возможность обмена данными с прочими устройствами диагностики и удаленного мониторинга.
В состав цепей увязки 9 с устройствами электрической централизации 14 входят (на фигурах не показаны):
- реле контроля нижнего положения;
- реле контроля замыкания пути в поездном маршруте приема нечетного поезда;
- реле контроля замыкания пути в поездном маршруте приема четного поезда;
- реле включения режима «Нормализация»;
- цепи включения контактов выше указанных реле.
Реле контроля нижнего положения предназначено для передачи устройствам электрической централизации 14 (фиг. 1) информации о текущем нижнем положении устройства закрепления 2 на пути. Контактами реле контроля нижнего положения обеспечивается блокировка цепей возбуждения сигнальных реле в маршрутах приема на путь или отправления с пути при отсутствии контроля нижнего положения устройства закрепления 2. Наличие реле контроля нижнего положения предусматривают для каждого пути, оборудованного устройствами автоматизированной системы управления устройствами закрепления поезда 2.
Реле контроля замыкания пути в поездном маршруте приема нечетного поезда и реле контроля замыкания пути в поездном маршруте приема четного поезда необходимы для передачи единому контроллеру 8 информации о наличии установленного нечетного или четного поездного или маневрового маршрута приема на путь. Указанные реле являются индивидуальными для каждого приемоотправочного пути, оборудованного устройствами закрепления 2. Реле контроля замыкания пути в поездном маршруте приема нечетного поезда необходимо устанавливать в случае, если на приемоотправочном пути, оборудованном устройствами закрепления 2, предусматривается закрепление составов, принимаемых с нечетной горловины станции. А реле контроля замыкания пути в поездном маршруте приема четного поезда необходимо устанавливать в случае, если на приемоотправочном пути предусматривается закрепление составов, принимаемых с четной горловины станции. В исходном состоянии данные реле находятся без тока. В случае задания четного или нечетного маршрута приема на путь соответствующее реле встает под ток. Контактами этих реле осуществляется передача на единый контроллер 8 информации об установленном маршруте следования поезда. Кроме того, в момент замыкания маршрута приема на путь осуществляется запуск процесса восстановления исходного состояния соответствующей напольной аппаратуры подсистемы прицельной остановки поезда, участвующей в установленном маршруте приема.
Реле включения режима «Нормализация» предназначено для обеспечения возможности выключения контроля нижнего положения у устройства закрепления 2 из зависимости при включенном режиме «Нормализация». Реле включения режима «Нормализация» предусматривают для каждого приемоотправочного пути, оборудованного устройствами автоматизированной системы управления.
Подсистема связи включает:
- пульт управления устройствами закрепления - далее пульт управления 10;
- устройство отображения диагностическое 11;
- цепи опроса контактов кнопок управления и ключа местного управления (на фигурах не показаны);
- цепи обмена данными между единым контроллером 8 и пультом управления 10;
- маневровую колонку 12.
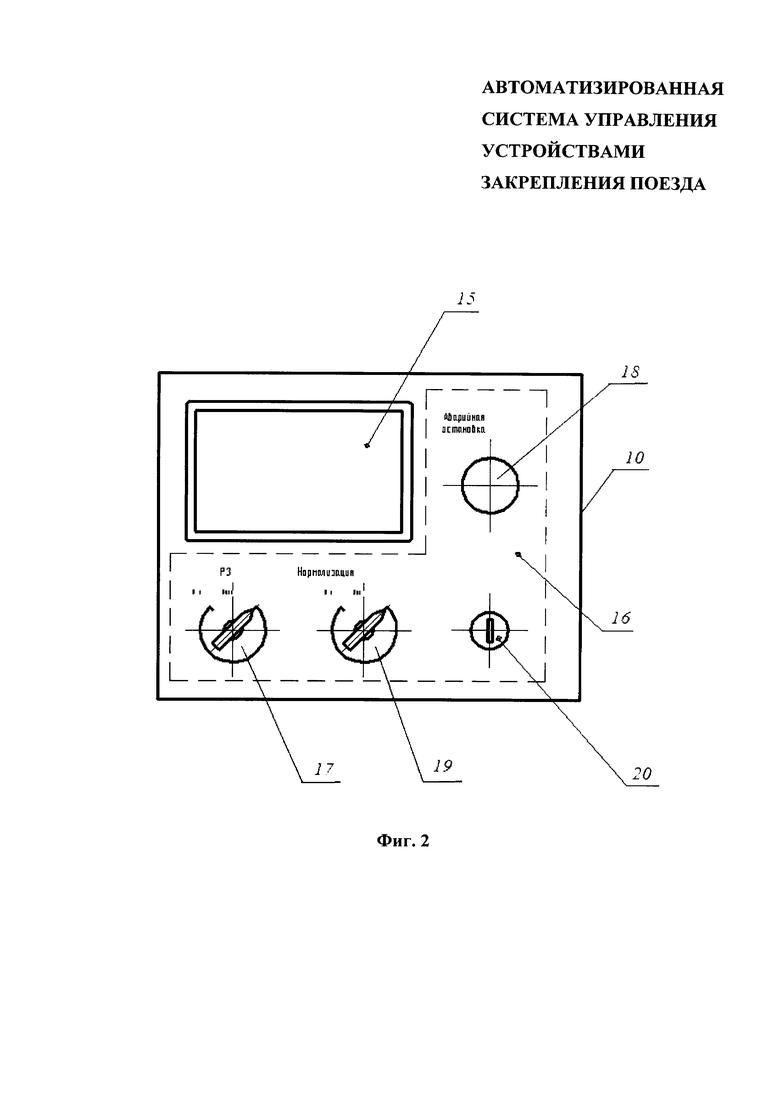
Пульт управления 10 (фиг. 2) предназначен для обеспечения возможности управления всеми устройствами автоматизированной системы управления, а также отображения текущего состояния устройств. Пульт управления 10 установлен на рабочем месте дежурного по станции.
На пульте управления 10 размещены:
- экран отображения информации 15, предназначенный для отображения информации: о текущем положении устройства закрепления 2, о наличии/отсутствии неисправностей; о несанкционированном доступе к устройствам;
- панель индикации 16, включающая:
- переключатель закрепления/раскрепления состава 17;
- кнопку аварийной остановки 18, предназначенную для экстренного выключения электропитания двигателей устройства закрепления в случаях, угрожающих здоровью обслуживающего персонала;
- кнопку переключения в режим «Вспомогательное управление» (на фигурах не показана);
- переключатель в режим «Нормализация» 19;
- электрозащелку ключа местного управления 20.
Устройство отображения диагностическое 11 (фиг. 1) предназначено для возможности отображения обслуживающему персоналу диагностической информации о текущем техническом состоянии устройств автоматизированной системы управления, а также архивирования и протоколирования указанной информации с возможностью ее последующей передачи устройствам удаленной диагностики и мониторинга.
Маневровая колонка 12 (фиг. 1) необходима для обеспечения возможности управления устройствами автоматизированной системы управления непосредственно в месте закрепления состава.
На лицевой панели маневровой колонки 12 размещены (на фигурах не показаны):
- переключатель закрепления/раскрепления состава;
- кнопка аварийной остановки;
- электрозащелка ключа местного управления;
индикаторы: «ЗАКРЕПЛЕН», «КОНТРОЛЬ НИЖНЕГО ПОЛОЖЕНИЯ», «КОНТРОЛЬ ВЕРХНЕГО ПОЛОЖЕНИЯ», «НОРМАЛИЗАЦИЯ», «МЕСТНОЕ УПРАВЛЕНИЕ», «НЕИСПРАВНОСТЬ», «АВАРИЙНАЯ ОСТАНОВКА».
Индикатор «ЗАКРЕПЛЕН» в исходном состоянии выключен. При наличии контроля нахождения закрепляемой колесной пары в зоне закрепления переключается в мигающий режим работы. Индикатор «ЗАКРЕПЛЕН» переключается в непрерывный режим работы после перевода устройства закрепления 2 (фиг. 1) в верхнее положение с контролем наличия закрепляемой колесной пары в зоне закрепления.
Индикатор «КОНТРОЛЬ НИЖНЕГО ПОЛОЖЕНИЯ», «КОНТРОЛЬ ВЕРХНЕГО ПОЛОЖЕНИЯ» предназначены для отображения информации о текущем положении устройства закрепления 2. Индикатор «КОНТРОЛЬ НИЖНЕГО ПОЛОЖЕНИЯ» светится непрерывно при наличии контроля нижнего положения устройства закрепления 2, а индикатор «КОНТРОЛЬ ВЕРХНЕГО ПОЛОЖЕНИЯ» - при наличии контроля верхнего положения устройства закрепления 2. При отсутствии достоверного контроля текущего положения устройства закрепления 2 индикаторы «КОНТРОЛЬ НИЖНЕГО ПОЛОЖЕНИЯ» и «КОНТРОЛЬ ВЕРХНЕГО ПОЛОЖЕНИЯ» переключаются в мигающий режим работы.
Индикатор красного цвета «НОРМАЛИЗАЦИЯ» предназначен для отображения информации о включенном/выключенном режиме «Нормализация». При выключенном режиме «Нормализация» указанный индикатор светиться непрерывно, а при включенном - работает в мигающем режиме.
Индикатор «МЕСТНОЕ УПРАВЛЕНИЕ» предназначен для отображения информации о переключении соответствующего устройства закрепления в режим местного управления. В исходном состоянии индикатор «МЕСТНОЕ УПРАВЛЕНИЕ» выключен. При изъятом ключе местного управления индикатор работает в мигающем режиме работы. После установки ключа местного управления в электрозащелку индикатор «МЕСТНОЕ УПРАВЛЕНИЕ» светится непрерывно.
Индикатор «НЕИСПРАВНОСТЬ» необходим для отображения информации о наличии неисправности в работе устройств автоматизированной системы управления. В исходном состоянии указанный индикатор светится непрерывно. При возникновении неисправности в работе устройств автоматизированной системы управления индикатор «НЕИСПРАВНОСТЬ» переключается в мигающий режим работы.
Индикатор «АВАРИЙНАЯ ОСТАНОВКА» светится непрерывно при отжатой кнопке аварийной остановки. После нажатия указанной кнопки индикатор «АВАРИЙНАЯ ОСТАНОВКА» переключается в мигающий режим работы.
Подсистема электропитания 13 включает (на фигурах не показаны):
- два изолирующих трансформатора;
- три устройства бесперебойного электропитания;
- два устройства подключения резервной цепи питания;
- источник питания.
Первый изолирующий трансформатор необходим для электропитания приводов устройства закрепления 2 (фиг. 1), а также гальванической развязки рабочих цепей указанных приводов от внешнего источника электроснабжения.
Второй изолирующий трансформатор предназначен для формирования цепей электропитания шкафа управляющего вычислительным комплексом и устройств отображения 7.1 и 7.2. При этом электропитание шкафа управляющего вычислительным комплексом должно предусматриваться с отдельной вторичной обмотки второго изолирующего трансформатора, к остальным вторичным обмоткам подключаются цепи электропитания устройств отображения 7.1 и 7.2. Исходя из допустимого размера максимальной фазной нагрузки, ко второму изолирующему трансформатору может быть подключено не более двух шкафов управляющего вычислительным комплексом и не более тридцати устройств отображения.
Первое устройство бесперебойного электропитания необходимо для обеспечения работоспособности напольной аппаратуры подсистемы прицельной остановки поезда при переключении фидеров питания станционных устройств, а так же на время запуска дизель-генераторного агрегата при отсутствии напряжения на основном и резервном фидерах питания.
Второе устройство бесперебойного электропитания предназначено для обеспечения работоспособности аппаратуры, размещаемой в маневровых колонках, при переключении фидеров питания станционных устройств, а также на время запуска дизель-генераторного агрегата при отсутствии напряжения на основном и резервном фидерах питания.
Третье устройство бесперебойного электропитания предназначено для обеспечения бесперебойного электропитания устройств отображения 7.1 и 7.2 за период не менее 3 минут, достаточных для переключения внешнего электропитания с основного источника на резервный и наоборот. Применяемый тип устройства бесперебойного электропитания зависит от количества подключаемых к нему устройств отображения. При этом к одному устройству бесперебойного электропитания может быть подключено не более пятнадцати устройств отображения. Каждое устройство бесперебойного электропитания подключается к соответствующей вторичной обмотке второго изолирующего трансформатора.
Устройства подключения резервной цепи питания предназначены для автоматического подключения цепей питания к устройствам бесперебойного питания в составе единого контроллера 8 и первого устройства бесперебойного электропитания в случае выключения напряжения внешнего источника питания.
Источник питания предназначен для формирования напряжения электропитания напольного оборудования подсистемы прицельной остановки поезда.
Изолирующие трансформаторы, второе и третье устройства бесперебойного электропитания размещены в шкафу автоматизированной системы управления закреплением поезда, а первое устройство бесперебойного электропитания, два устройства подключения резервной цепи питания и источник питания - в шкафу управляющего вычислительным комплексом.
Электропитание устройств автоматизированной системы управления закреплением поезда (подключение изолирующих трансформаторов) предусматривается от внешнего трехфазного источника гарантированного электроснабжения. В качестве указанного источника могут быть использованы устройства электропитания электрической централизации на станции при условии, что указанные устройства обеспечивают возможность подключения дополнительной нагрузки, необходимой для устройств автоматизированной системы управления закреплением поезда.
Автоматизированная система управления устройствами закрепления поезда работает следующим образом.
В исходном состоянии устройство закрепления 2 (фиг. 1) находится в нижнем положении. Ключи местного управления находятся в электрозащелке 20 пульта управления 10 (фиг. 2). На панели индикации 16 пульта управления 10 включена индикация нижнего положения устройства закрепления. Отсутствуют: индикация готовности устройств к закреплению, индикация верхнего положения устройства закрепления, индикация наличия неисправности, аварийной остановки, передачи на местное управление и включенного режима «Нормализация». Пункты счета осей 5.1-5.10 (фиг. 1) находятся в деактивированном состоянии, при котором единый контроллер 8 не осуществляет подсчет количества осей, прошедших над ними, но непрерывно контролирует их исправное техническое состояние и правильность положения относительно рельса.
Для приема поезда на станцию дежурный по станции установленным порядком задает маршрут приема поезда на путь и предупреждает машиниста прибывающего поезда о том, что путь приема оборудован устройствами автоматизированной системы управления закреплением поезда.
Далее рассмотрен порядок работы устройств автоматизированной системы управления во время приема поезда.
После замыкания маршрута контактами реле контроля замыкания пути в поездном маршруте в единый контроллер 8 передается управляющая команда на активацию пунктов счета осей, расположенных в пунктах определения длины состава 4.1-4.2 и в пункте определения колесной пары 3. Единый контроллер 8 активирует пункты счета осей и запускает алгоритм приема поезда.
При проходе поезда по пунктам счета осей 5.1-5.3 и 5.8-5.10, расположенных в пунктах определения длины состава 4.1-4.2, единый контроллер 8 осуществляет расчет длины принимаемого поезда на основе межосевых расстояний.
В момент вступления первой оси принимаемого поезда на пункт счета осей, расположенных в пункте определения колесной пары 3, единый контроллер 8 запускает алгоритм вычисления необходимого расстояния до остановки поезда и формирует управляющую команду на включение соответствующего значения на устройства отображения 7.1 и 7.2 в виде трехзначного числа, показывающего расстояние в метрах до места остановки локомотива.
После вступления второй оси закрепляемого вагона в зону закрепления, единый контроллер 8 формирует и передает устройствам отображения 7.1 и 7.2 управляющую команду на отображение показания «000».
Машинист должен остановить поезд так, чтобы на устройствах отображения 7.1-7.2 показания имели значение «000». При условии нахождении второй оси закрепляемого вагона в зоне закрепления, единый контроллер 8 формирует команду на включение индикации о готовности устройств автоматизированной системы управления к закреплению поезда. На панели индикации 16 (фиг. 2) пульта управления 10 включается соответствующая индикация.
Дежурный по станции, убедившись по показаниям на пульте управления 10, о готовности устройств может дать команду на закрепление состава путем перевода и кратковременного удержания (от 2 до 3 секунд) переключателя закрепления/раскрепления поезда 17 в положение «Закрепление». После перевода указанного переключателя единый контроллер 8 (фиг. 1) формирует управляющую команду подсистеме управления 1 на перевод устройства закрепления 2 в верхнее положение.
В момент начала перевода устройства закрепления 2 в верхнее положение подсистема управления 1 передает в единый контроллер 8 соответствующую информацию. Единый контроллер 8 формирует управляющую команду на выключение реле контроля нижнего положения из состава цепей увязки 9. Контакты реле контроля нижнего положения блокируют возможность задания дежурным по станции маршрутов отправления и приема на данный путь. Одновременно на пульте управления 10 выключаются индикация нижнего положения и индикация готовности к закреплению соответствующего устройства закрепления 2.
После перевода устройства закрепления 2 в верхнее положение (закрепление состава) подсистема управления 1 передает в единый контроллер 8 соответствующую информацию. Единый контроллер 8 формирует управляющую команду на включение на пульте управления 10 соответствующей индикации верхнего положения устройства закрепления 2 и закрепленного состояния состава.
Порядок работы устройств автоматизированной системы управления при раскреплении поезда.
При подаче локомотива под состав дежурный по станции предупреждает машиниста о том, что поезд закреплен устройствами автоматизированной системы управления.
После объединения локомотива с составом (поездом) производят осаживание или протяжку состава, в зависимости от расположения локомотива, в сторону, противоположную уклону. Колесная пара выходит из зоны действия устройства закрепления 2. Единый контроллер 8 на основе данных, полученных от пункта определения колесной пары 3, формирует управляющий сигнал об отсутствии закрепляемой колесной пары в зоне закрепления. На пульте управления 10 включается соответствующая индикация. Далее дежурный по станции дает команду на раскрепление поезда путем перевода и кратковременного удержания (от 2 до 3 секунд) переключателя закрепления/раскрепления поезда 17 (фиг. 2) в положение «Раскреплено».
Единый контроллер 8 (фиг. 1), с контролем отсутствия предпоследней колесной пары последнего вагона в зоне закрепления, формирует подсистеме управления 1 управляющий сигнал на перевод устройства закрепления 2 в нижнее положение.
После получения от подсистемы управления 1 информации о переводе устройства закрепления 2 в нижнее положение единый контроллер 8 формирует управляющий сигнал на включение реле контроля нижнего положения в составе цепей увязки 9. Контакты реле контроля нижнего положения снимают блокировку задания маршрутов приема на данный путь и отправления с данного пути. Одновременно на пульте управления 10 включается индикация нижнего положения устройства закрепления 2.
Порядок передачи устройств автоматизированной системы управления устройствами закрепления поезда на местное управление.
Данную работу выполняют при проведении технического обслуживания или при аварийных ситуациях.
Для передачи управления работой устройства закрепления 2 (фиг. 1) на маневровую колонку 12 дежурный по станции должен изъять ключ местного управления из электрозащелки 20, расположенной на пульте управления 10 (фиг. 2), и передать лицу, ответственному за содержание в исправном состоянии устройства закрепления. В момент изъятия ключа из электрозащелки 20 единый контроллер 8 формирует управляющий сигнал на включение индикации передачи на местное управление соответствующего устройства закрепления. Одновременно единый контроллер 8 блокирует входные контрольные цепи, подключенные к контактам переключателя закрепления/раскрепления поезда.
После установки ключа местного управления в электрозащелку, расположенную на маневровой колонке 12 (фиг. 1), и его повороте, единый контроллер 8 разблокирует цепи опроса контактов переключателя закрепления/раскрепления поезда, расположенного на маневровой колонке 12. Лицо, ответственное за содержание в исправном состоянии закрепляющего устройства, имеет возможность закрепить или раскрепить состав путем перевода переключателя закрепления/раскрепления поезда в соответствующее положение. При этом перевод устройства закрепления 2 осуществляется по командам единого контроллера 8 без проверки условий нахождения или отсутствия закрепляемого колеса в зоне закрепления.
Один единого контроллера 8 обеспечивает возможность оборудования устройствами автоматизированной системы управления устройствами закрепления поезда - до пятнадцати приемоотправочных путей. При необходимости оборудования большего количества путей необходимо использование дополнительного единого контроллера.
Автоматизированная система управления устройствами закрепления поезда может применяться на железнодорожных станциях:
- оборудованных устройствами релейной или микропроцессорной электрической централизации;
- с любым видом тяги поездов.
Автоматизированная система управления устройствами закрепления поезда обеспечивает выполнение следующих функций:
- отображение машинисту поезда информации о расстоянии, которое необходимо проехать до момента остановки поезда и его последующего закрепления;
- автоматический контроль нахождения колесной пары в зоне закрепления и закрепление подвижного состава по команде дежурного по станции;
- закрепление подвижного состава по команде дежурного по станции в режиме «Вспомогательное управление»;
- раскрепление подвижного состава по команде дежурного по станции;
- возможность передачи, по команде дежурного по станции, управления устройствами закрепления на маневровую колонку;
- блокировку перевода закрепляющих устройств в верхнее положение (рабочее положение, соответствующее закрепленному составу) при заданном поездном или маневровом маршруте приема или отправления с данного пути;
- блокировку задания поездных маршрутов отправления или приема на данный путь при отсутствии контроля нижнего положения закрепляющих устройств (нерабочее положении соответствующее раскрепленному составу, не препятствующее движению);
- отображение текущего состояния закрепляющих устройств на рабочем месте дежурного по станции и маневровой колонке;
- переход в режим «Нормализация».
Отображение машинисту поезда информации о расстоянии, которое необходимо проехать до момента остановки поезда и его последующего закрепления, осуществляется автоматизированной системой управления устройствами закрепления поезда только при наличии ранее заданного маршрута приема на путь. При немаршрутизированных передвижениях отображение указанной информации не предусматривается.
Управление закрепляющими устройствами с маневровой колонки, как правило, применяется при техническом обслуживании устройств.
С целью исключения возможности одновременного управления устройствами закрепления - с маневровой колонки и с поста дежурного по станции - применяется ключ местного управления, который хранится на посту дежурного по станции. При изъятом ключе цепи управления закрепляющими устройствами с пульта управления, находящегося на посту дежурного по станции, блокируются. Для включения режима местного управления необходимо вставить ключ местного управления в электрозащелку на панели маневровой колонки и повернуть на 90°. Для каждого пути, оборудованного закрепляющими устройствами, предусматривается соответствующий ключ местного управления.
Режим «Вспомогательное управление» предназначен для обеспечения возможности закрепления подвижного состава при отсутствии контроля наличия колесной пары в зоне закрепления. Переключение в режим «Вспомогательное управление» осуществляется дежурным по станции путем нажатия специализированной кнопки на пульте управления.
При включенном режиме «Нормализация», устройства закрепления, находящиеся в рабочем положении, автоматически переводятся в нерабочее положение. После получения контроля нерабочего положения устройств закрепления, последние выключаются из зависимости с электрической централизацией. При этом устройства электрической централизации продолжают работу установленным порядком. Переключение в режим «Нормализация» осуществляется по команде дежурного по станции путем перевода соответствующего переключателя на пульте управления автоматизированной системы управления. При этом для каждого пути, оборудованного устройствами закрепления, предусматривается отдельный переключатель.
Автоматизация процесса управления устройствами закрепления поезда при помощи автоматизированной системы управления позволяет:
- сократить продолжительность закрепления, обеспечив тем самым повышение производительности труда;
- исключить необходимость присутствия человека (сигналиста) в опасной зоне на путях во время закрепления поезда, обеспечив тем самым повышение безопасности технологического процесса;
- исключить сигналиста из штатного расписания, обеспечив тем самым сокращение трудозатрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| Система автоматического закрепления подвижного состава | 2024 |
|
RU2836918C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| СПОСОБ ПРИЦЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДА НА УЧАСТКЕ ПУТИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2020 |
|
RU2751589C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики, для дистанционного управления фиксаторами закрепления подвижного состава. Система содержит подсистему связи с маневровой колонкой и пультом управления, расположенным у дежурного по станции. Дополнительно в систему включены подсистема управления устройствами закрепления, подсистема прицельной остановки поезда, снабженная пунктом определения колесной пары и пунктами определения длины состава, путевыми ретрансляторами сигналов и устройствами отображения, устройства электрической централизации и цепи увязки с ними, подсистема электропитания, связанные с пультом управления через, по меньшей мере, один единый контроллер. Причем подсистема связи дополнительно снабжена диагностическим устройством отображения. Достигается повышение безопасности технологического процесса. 2 з.п. ф-лы, 2 ил.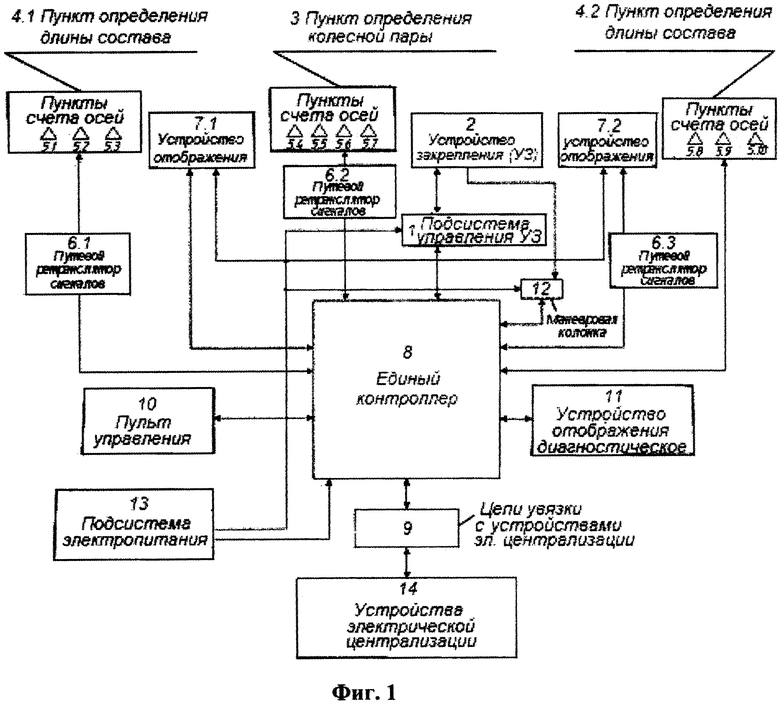
1. Автоматизированная система управления устройствами закрепления поезда, содержащая подсистему связи с маневровой колонкой и пультом управления, расположенным у дежурного по станции, отличающаяся тем, что в систему включены подсистема управления устройствами закрепления, подсистема прицельной остановки поезда, снабженная пунктом определения колесной пары и пунктами определения длины состава, путевыми ретрансляторами сигналов и устройствами отображения, устройства электрической централизации и цепи увязки с ними, подсистема электропитания, связанные с пультом управления через, по меньшей мере, один единый контроллер, при этом подсистема связи дополнительно снабжена диагностическим устройством отображения.
2. Автоматизированная система управления по п. 1, отличающаяся тем, что пункт определения колесной пары содержит пункты счета осей.
3. Автоматизированная система управления по п. 1, отличающаяся тем, что каждый пункт определения длины состава содержит пункты счета осей.
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ СТАЦИОНАРНЫМ ТОРМОЗНЫМ УПОРОМ ДЛЯ ЗАКРЕПЛЕНИЯ СОСТАВА | 2009 |
|
RU2399534C1 |
| WO 2012171096 A1, 20.12.2012 | |||
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2008 |
|
RU2392151C2 |
| DE 3043211 A, 01.07.1982. | |||

