(5) СПОСОБ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ КОМПЛЕКСНЫХ ИММИТАНСОВ ИНДУКТИВНОГО
V.- -, , ... .: . . :-/.i
Изобретение относится к электроизмерительной технике и может быть использовано для раздельного измерения параметров L, О или L, тушек индуктивности и других комп- : лексных српротивлений и проводимое-тей индуктивного характера в.расиж ренном диапазоне значений добротно сти.. - .,..
Известен способ раздельного измерения параметров L, Q или L, tgfl комплексных сопротивлений и проврдимостей индуктивного характера с помощью уравновешенного частотно-независимого четырехплечего моста ГОНедостатком этого способа является резко возрастающая продолжительность измерения при значениях добротности Q измеряемых комплексных иммитансов, меньших 1, 4to объясняется малым значением угла сходимости моста. :
Известен способ измерения параметров L, Q комплексных сопротивлений ХАРАКТЕРА
.индуктивного характера с помощьк моста Максвелла, содержащий tpM операции раздельного уравновешивания по фазовому методу. При первой операции с помощью осциллографа, включенного по фазо увствительной схеМе, запоминают остающийся неизменным при всех операциях уравновешивания сдвиг по фазе между напряжением на одном из плеч отношения моста и напряжением
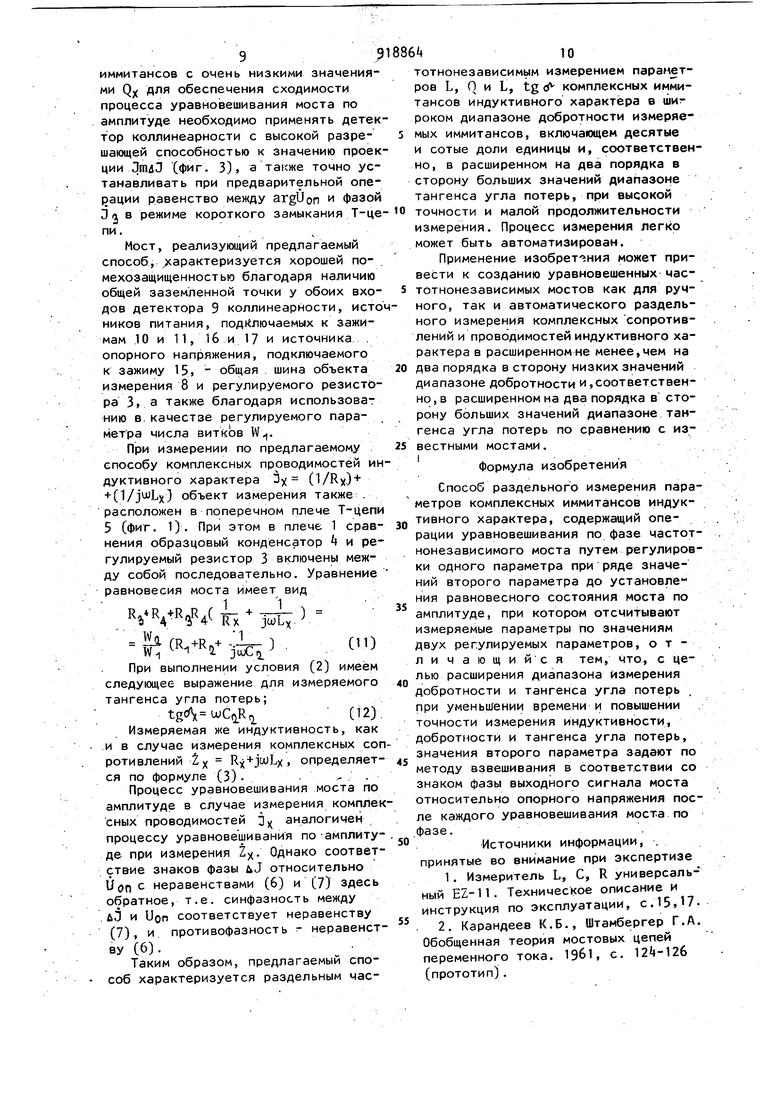
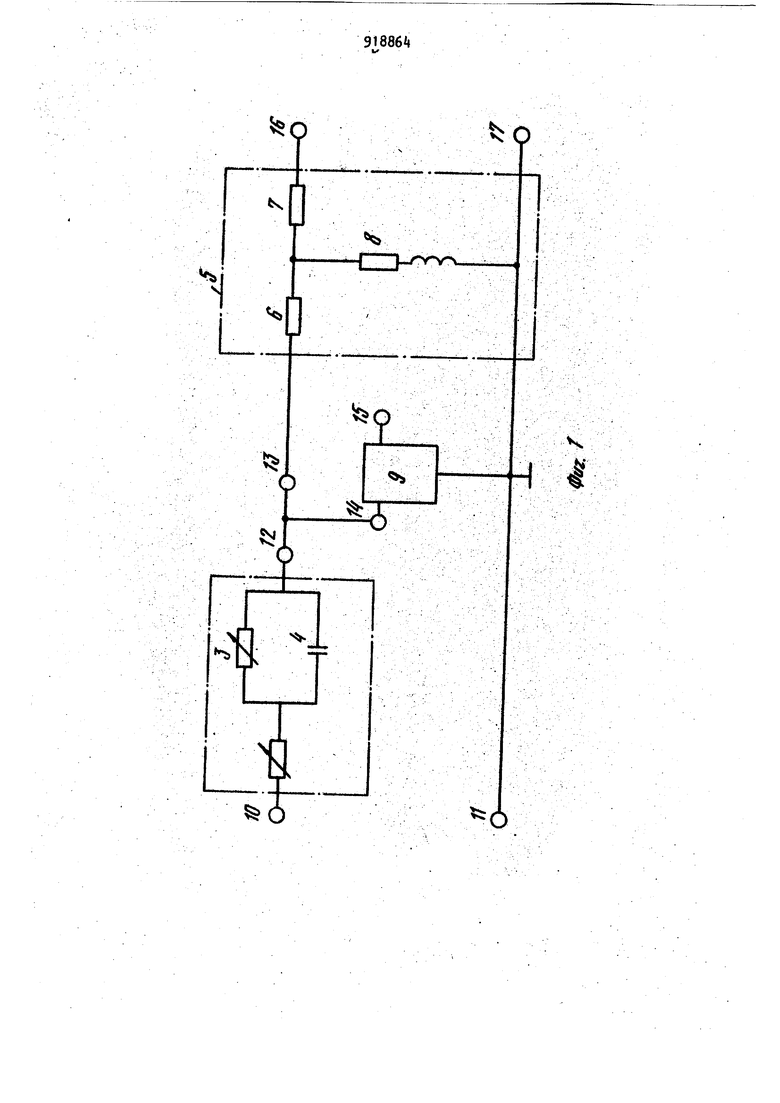
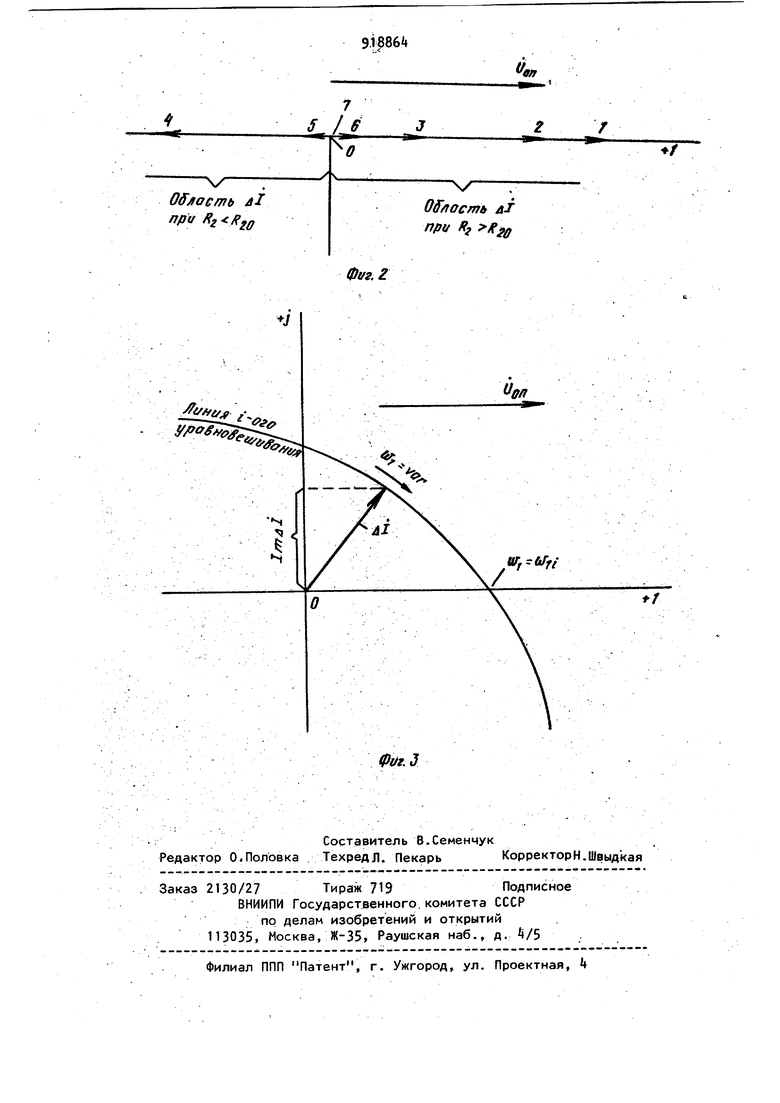
10 питания. Операция заканчивается све дением эллипса на экране осциллографа в прямую линию регулировкой фазовращателя в одной из входных цепей осциллографа. При второй операции устанавливают фазовый сдвиг который запоминался при первой операции, между напряжением на измерительной диагонали моста и напряжением на другом плече отношения регулировкой активно20го сопротивления, включенного в это плечо. Операция заканчивается сведением эллипса на экране в прямую линию. При третьей операцж регулиров|кой активного сопротивления в плече сравнения уравновешивают мост до нулевого показания осциллографа, пе реведенного в амплитудный режим индикации 2 .. Недостаток известного способа зак лючается в низкой точности измерения из-за сильного влияния погрешности установки фазовых сдвигов при прове дении первой и второй операций раздельного уравновешивания на полноту достигаемого равновесия моста по амплитуде по окончании третьей завершающей операции . Погрешность измерения с уменьшением добротности объекта измерения растет, принимая« недопустимые значения, так как noi- решность фазового указателя, используемого в мосте, становится соизмеримой со значениями устанавливаемых с его помощью фазовых сдвигов. Низ|кая точность измерения обусловлена также шунтирующим влиянием входных цепей фазового указателя на плечи моста при проведении первой и второй операций раздельного уравновешивания Кроме того, мост, реализующий известный способ измерения, содержит в плече сравнения образцовую индуктивность, что затрудняет раздельный OTC чет. Мост также характеризуется низкой помехозащищенностью из-за отсутствия общей заземленной точки у вход ных цепей фазового указателя и источника питания при проведении второ операции уравновешивания. Целью изобретения является расширение диапазона измерения добротности и тангенса угла потерь при уменьшении времени и повышении точности измерения индуктивности, добротности и тангенса угла потерь. Поставленная.цель достигается тем что согласно способу раздельного измерения параметров комплексных импульсов индуктивного характера,содержащему операции уравновешивания по фазе частотнонезависимого моста путем регулировки одного из параметров при ряде Значений второго параметра до установления состояния равновесия моста по амплитуде, при котором отсчитывают измеряемые параметры по значениям двух регулируемых параметров, значения второго параметра задают по методу взвешивания в соответствии со знаком фазы выходного сигнала моста относительно опор ного напряжения после каждого уравновешивания моста по фазе. Вследствие однозначного соответствия между значением второго параметра, взятым по избытку или недостатку относительно значения этого параметра, отсчитываемого по окончании процесса измерения, и знаком фазы выходного сигнала моста относи тельно опорного напряжения после каждого уравновешивания моста по фазе регулировкой первого параметра процесс уравновешивания моста по амплитуде является направленным. Число необходимых уравновешиваний моста по фазе определяется только погрешностью отсчета второго регулируемого параметра, значения которого задают по методу взвешивания, и не зависит . от значения добротности или тангенса угла потерь субъекта измерения. Поэтому предлагаемый способ и становится возможным для раздельного измерения параметров L, Q комплексных сопротивлений и L, tgc комплексных проводимостей индуктивного характера в расширенном диапазоне добротности и расширенном диапазоне тангенса угла потерь измеряемых иммитансов или малой продолжительности измерения. Благодаря достижению полного равновесия моста по амплитуде при отсутствии шунтирующих влияний входных цепей используемого в операциях уравновешивания моста по фазе детектора коллинеарности на плечи моста предлагаемый способ характеризуется повышенной точностью измерения. На фиг. 1 изображена схема моста, реализующего предлагаемый способ в случае измерения комплексных сопротивлений индуктивного характера; на фиг. 2 - области расположения векторов выходного тока моста на оси, совпадающей по направлению с вектором опорного напряжения, при двух видах неравенств между выставленным и отсчитываемым значением параметра, ре гулируемого по методу взвешивания в соответствии со знаком фазы выходного тока уравновешенного моста по фазе; на фиг. 3 характер изменения проекции выходного тока на ось нимых чисел комплексной плоскоси, вещественная ось которой/ овпадает по направлениюс вектозЬм опорного напряжения, при 1-том уравновешивании моста по фазе. Мост содержит плечо 1 сравнения, состоящее из регулируемых резисторов ,2 и 3, образцового конденсатора , включенного параллельно резистору 3 Т-цепь5 - продольные плечи которой образуют образцовые резисторы 6 и 7 а поперечным плечом служит объект 8 измерения, детектор 9 коллинеарности т.е.детектор, позволяющий установить синфазность и противофазность двух синусоидальных активных величин с указанием знака установленного фазрвого сдвига. В качестве детектора коллинеарности можно применить фазочувствитеЛьный нуль-индикатор с соответствующей электронной схемой индйкации знака фазы, зажимы 10 - 17. Мост (фиг. ) описывается следУющим уравнением равновесия, легко rioлучаемым по методу коэффициентов п0еобразования:R +R ,-ь-jц;Lx .., . :J1/R)+juCri . где 0- - напряжение на зажимах 10 . , -и .11.; : ., , . / напряжение на зажимах . : . и.-17;. V i RyjLjt - параметры объекта 8 измерения;частота источника питаний ;RI;RI регулируемые активные cQr ротиЁления резисторов2 и 3 :, ;,GV .емкость образцового крнден сатора ; сопротивления образцовых резисторов 6 и 7. Из уравнения (1) видно, .что MIQCT (фиг. 1).частотнонезависим. Заменив в (1) отношение противофазных напряжений источников питания U,Ufj отношением чисел витков при использовании, например, вторичных; обмоток W( трехобмоточного тран сформатора напряжения с тесной ин-. дуктивной связью в качестве источников противофазных напряжений, получаем при выполнении условия Ri щ CR3-R4) : следующие расчетные формулы: Lx .L; ,i из которых видно, что мост характеризуется раздельным отсчетом измеряе мых параметров LX и Qx, причем L/ отсчитывают по числу витков %, а QJ, - по сопротивлению R , Выполнение условия (2)не вызывает затруднений: необходимо, чтобы числа включенных ступеней каждой декады W были одинаковыми, причем значение ступени младшей декады R равно R - W п Перед началом измерений по предлагаемому способу производят предварительную операцию после подключения объекта 8 измерения в поперечное плечо Т-цепи 5 устанавливают фазу опорного напряжения , между зажимом 15 и общей шиной, равной фазе выходного тока З,, текущего от зажима 13 к Т-цепи 5 в режиме короткого замыкания ее. При этой предварительной операции регулируют фазу опорного напряжения UQ- по показаниям детектора 9 коллинеарности,вход;ной зажим Н которого подсоединен к |выходному зажиму 13 Т-цепи 5 и от;соединен от выходного зажима 12 ,плеча 1 сравнения. Входное сопротивление детектора 9 коллинеарности пре- . небрежимо мало по сравнению с выходным сопротивлением Т-цепи 5. Поэтому установленный а конце предварительной операции угол .atg Ооп райен фазе выходного тока Dj Т-цепи в равновесном состоянии моста по амплитуде. После предварительной операции проводят операции уравновешивания моста по фазе, т.е. проводят уравновешивания по. фазе выходных токов 3„ плеча 1 сравнения и Jn Т-цепи 5 регулировками числа витков W и связанного с ним регулируемого резис тора 2. При этих операциях плечо 1 сравнения, Т-цепь 5,Детекто| з 9 коллинеарности соединены так, как показано на фиг. 1. При всех операциях уравновешивания по фазе выполняется условие: выходное сопротивление моста между точкой соединения зажимов 12, 13 и общей шиной измерительной диагонали остается значительно большим. Чем входное сопротивление детектора 9 коллинеарности. Операции уравновешивания по фазе проводят при значениях резистора 3, которые задают по методу взвешива- ния по знаку фазы выходного тока дЛ, протекающего по цепи от точки соединения зажимов 12 и 13 к зажиМу И, относительно опорного напряжения Don по окончании предыдущейоперации уравновешивания по фазе, так как синфазности векторов (векторы 01; 02 03; 06; Оу на фиг, 2) и вектора U iCOOTBeTCTByeT неравенство Rny , (6J а сдвигу на 180 между ними (векто,, . ры 07; фиг. 2) соответствует нера венство (7) RO R 10 где R /j(j- отсчитываемое знамени Rrji т.е. согласно (4) Rj SjL (8) При уравновешиваниях моста по фазе число витков W-i регулируют по поЛазаниям детектора 9 коллинеарности, реагирующего при W Var на знак и на величину проекции тока aj на ось мнимых чисел в комплексной плоскости, вещественная ось которой параллельна вектору йдр,(фиг. 3). Первое уравновешивание моста (фиг. 1) по фазе проводят при , где максимальное-значение RI дЛя данного поддиапазона добротности в котором находится значение Q. Ееяи по окончании первого уравновешивания по фазе детектора 9 коллинеарности покажет совпадение вектора дЛ по фазе с Up(,, то второе ураановешивание моста по фазе проводят при ). Если по окончаНИИ второго уравновешивания моста по фазе детектор 9 коллинеарности покажет опять наличие синфазности между UJ и UQJ, , то третье уравновешивание моста по фазе проводят при (1-0,5-0,25) и т.д. .Уравновешивания моста по фазе при все меньших весах изменения параметра резистора 3 проводят до тех пор, .пока не будет выполняться с погрешностью до одногоотсчитываемого в младшем разряде знака параметра резистора 3 расчетное соотношение (4). При выполнении (4) уравновешенный по фазе мост удовлетворяет и расчетному соотношению (3), т.е. является уравновешенным и по амплитуде.
УИСЛО уравновешиваний моста по фазе невелико: оно равно 7; Ю; 17 при отсчете соответственно 2-х; 3-х; t-x и 5-ти знаков параметра ре- зистора 3 в десятичной системе счисления при любых значениях-Qy.
Отметим, что уравновешивания моста по фазе регулировкой одной переУказанные погрешности установки фазы опорного напряжения и коллинеарности между д и йрп не влияют на .выбор значений К(,так как при выборе значений параметра Rij, задаваемого по методу взвешивания,используется знак фазы выходного токаДЛ относительно UQn а не значение ее. При измерении менной W являются направленными, так как (фиг. 3)при неравенстве (9) где W,- значение Wx), соответствую-, ii и и. щее коллинеарности между uj и по окончании i-oro уравновешивания по фазе, указанная проекция JmaJ положительная, а при . . W, W,(10) принимает отрицательные значения. При W-, W.|; абсолютное значение проекции ЛтлЛ с увеличением W монотонно возрастает. Это обстоятельство также можно использовать для выработки воздействий по изменению W при уравновешиваниях моста по фазе. С приближением к полному равновесию моста по амплитуде последние уравновешивания моста по фазе протекают значительно быстрее, чем первые операции уравновешивания моста по фазе, так как последние веса изменения резистора 3 малы. Итак, процесс уравновешивания моста по амплитуде проводят за заранее известное и достаточно малое количество операций направленного уравновешивания по фазе регулировкой переменной W/,. Поэтому процесс уравновешивания моста по амплитуде является быстросходящймся при любых значениях измеряемого иммитанса. Погрешности установки фазы опорного напряжения при предварительной операции, а также погрешности установки коллинеарности между Д5 и UQO при уравновешиваниях по фазе выходных токов J(j и 5j не оказывают влияния на точность измерения, так как мост в конце Измерения по предлагаемому способу уравновешен по амплитуде., . Не оказываютвлияния на точность измерения и входные цепи детектора 9 коллинеарности, так как одна из них (фиг. 1) включена в измерительную диагональ моста между точкой соединения зажимов 12, 13 и общей шиной, а другая подключена к источнику опорного напряжения иммитансов с очень низкими значениями Qj( для обеспечения сходимости процесса уравновешивания моста по амплитуде необходимо применять детек тор коллинеарности с высокой разрешающей способностью к значению проек ции ЗтлЛ (фиг. 3), а та1сже точно устанавливать при предварительной опе 5ации равенство между argUon и фазой За в режиме короткого замыкания Т-це Мост, реализующий предлагаемый способ, характеризуется хорошей помехозащищенностью благодаря наличию общей заземленной точки у обоих входов детектора 9 коллинеарности, исто ников питания, под| лючаемых к зажимам .10 и 11, 16 и 17 и источника. . опорного напряжения, подключаемого к зажиму 15, - общая . шина объекта измерения 8 и регулируемого резистора 3 а также благодаря использованию в. качестве регулируемого параметра числа витков W. При измерении по предлагаемому способу комплексных проводимостей ин дуктивного характера Зх (1/Rx) + (1/jwL)() объект измерения также . расположен в поперечном плече Т-цепи 5 (фиг. 1). При этом в плече 1 сравнения образцовый конденсатор k и регулируемый резистор 3 включены между собой, последовательно. Уравнение равновесия моста имеет вид R RitRftR.( Jr- - -т- ) а 4 б 4 RX 3wL w №.RI - ) При выполнении условия (2) имеем следующее выражение для измеряемого тангенса угла потерь; tg( (12) Измеряемая же индуктивность, как и в случае измерения комплексных соп ротивлений 2; j( R +jijoLx , определяется по формуле (3) . . . . . Процесс уравновешивания моста по амплитуде в случае измерения комплек сных проводимостей З аналогичен процессу уравновешивания по -амплйтуде при измерения Z)(. Однако соответствие знаков фазы LJ относительно и on с неравенствами (6) и (7) здесь обратное, т.е. синфазность между .лЗ и Don соответствует неравенству (7), и противофазность - неравенству (6). Таким образом, предлагаемый способ характеризуется раздельным час4тотнонезависимым измерением параметров L, О и L, tg сЛ комплексных иммитансов индуктивного характера в ши роком диапазоне добротности измеряемых иммитансов, включающем десятые и сотые доли единицы и, соответственно, в расширенном на два порядка в сторону больших значений диапазоне тангенса угла потерь, при высокой точности и малой продолжительности измерения. Процесс измерения легко может быть автоматизирован. Применение изобретгния может привести к созданию уравновешенных частотнонезависимых мостов как для ручного, так и автоматического раздельного измерения комплексных сопротивлений и проводимостей индуктивного характера в расширенном не менее,чем на два порядка в сторону низких значений диапазоне добротности и ,соответственнс1,в расширенном на два порядка в сторону больших значений диапазоне тангенса угла потерь по сравнению с известными мостами. Формула изобретения Способ раздельного измерения параметров комплексных иммитансов индуктивного характера, содержащий операции уравновешивания по фазе частотнонезависимого моста путем регулировки одного параметра при ряде значений второго параметра до установления равновесного состояния моста по амплитуде, при котором отсчитывают измеряемые параметры по значениям двух регулируемых параметров, отличающийся тем. Что, с целью расширения диапазона измерения добротности и тангенса угла потерь при уменьшении времени и повышении точности измерения индуктивности, добротности и тангенса угла потерь, значения второго параметра задают по методу взвешивания в соответствии со знаком фазы выходного сигнала моста относительно опорного напряжения после каждого уравновешивания моста по фазе.. Источники информации, . принятые во внимание при экспертизе 1. Измеритель L, С, R универсальный EZ-11. Техническое описание и инструкция по эксплуатации, с. 15,17. . 2. Карандеев К.Б., Штамбергер Г.А. Обобщенная теория мостовых цепей переменного тока. 19б1, с. 12 4-126 (прототип).
5s
i ,
L.
n
о
Of OCfTlb 4/ при
V 7
Of/юсть лТ
при RI
фуг, Z
Фиг. J
