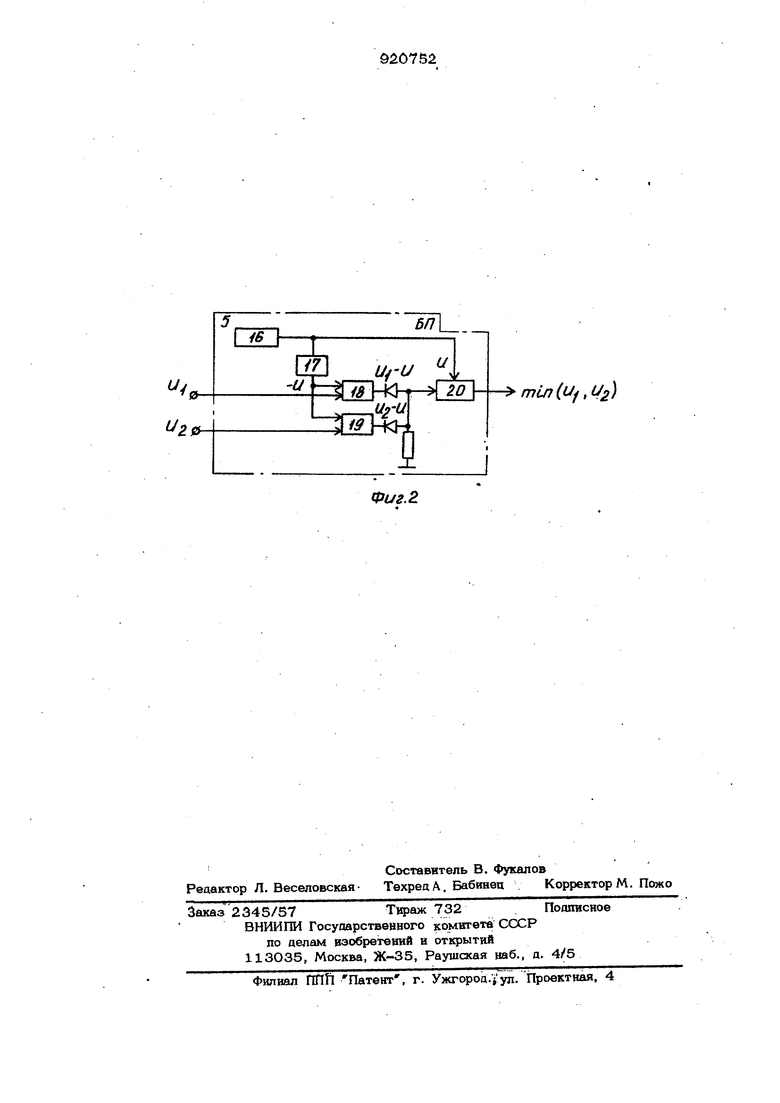
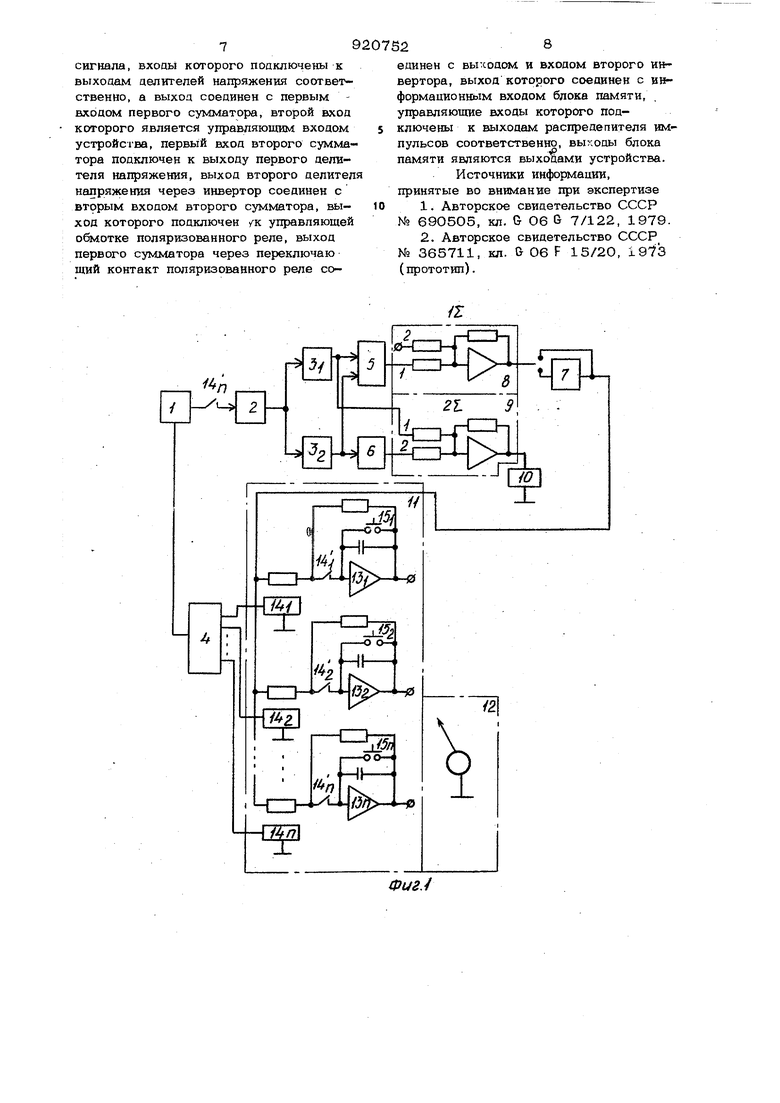
блок памяти и блок выбора минимально го сигнала, входы которого подключены к выходам делителей напряжения соответственно, а выход соединен с первым входом первого сумматора, второй вход которого является управляющим входсм устройства, первый вход второго сумматора подключен к выходу первого . делителя напряжения, выход второго делителя напряжения через инвертор соед нен с вторым входом второго сумматора выход которого подключен к управляю:щей обмотке поляризованного реле, выход первого сумматора соединен через переключающий контакт поляризованного реле с выходом и входом второго инвер тора, выход которого соединен с инфЬр мационным входом блока памяти, управляющие входы которого подключены к выходам распределителя импульсов соответственно, а выходы блока памяти явля ются выходами устройства. На фиг. 1 изображена структурная схема устройства, на фиг. 2 - один из возможных вариантов блока выбора минимального сигнала. Устройство включает генератор 1 импульсов, шагоЕый искатель 2, делители SY и 3j, напряжения, распредегштель импульсов, схему 5 выделения м ньщей величины, инверторы 6 и 7, сумматоры 8 и 9,поляризованное реле 1О, блок 11 памяти и измерительный прибор 12. Блок 11 памяти состоит из г инерционных звеньев 13, 132 -.- 13р, которы в зависимости от положения контактов 14:J , 14г.... 14 реле 14, 142, , могут находиться в режиме слежения или в режиме хранения. Входы инерционных звеньев объединены и являются информационным входом блока 11 памяти. В состав блока. входят также кнопки 15. Управляющие входы группы реле 14 соединены с соответствующими вхог.ми распределителя 4 импульсов. С делителей 3 и 3 снимаются напряжения, пропорциональные времени обработки 1 -ого изделия на мащинах А и В соответственно. tu, t2, .,tJA, .. . tnA, t-lbjtzb, ... t При подготовке устройства к работе необходимо так соединить выводы секций делителей с ламелями шагового искателя., чтобы напряжения на периэ1х ламелях были пропорциональны величинам tiA, tib, на вторых ламепях -t, ti% и т. д. Щетки перемещаются якорем шагового искателя 2 одновременно, поэтому напряжения и tJA И tjb выдаются делителями также одновременно. Распределитель 4 импульсов последовательно подает первый (импульс генератора 1 на реле 14,, управляющее режимом работы звеньев 13, второй импульс 14,, управляющее режимом раg . Зг, и т. д. до п -ого импульса включительно.. Оптимальная по быстродействию последовательность обработки изделий .на двух машинах А к В может быть получена по следующему алгоритму. Каждому -ому изделию ставится в соответствие величина LO(t)-sin§n(tJA-tjb)LM-min(tjfc ,), где М moix minCtjA, , Упорядочив изделия в порядке неубывания величин и) (j), получают искомую оптимальную последовательность. Формула (1) реализована в предлагаемом устройстве, что позволяет значительно сократить объем оборудования. Блок 5 выбора минтямапьного сигнала содержит источники постоянного: ,напряжения 16, инвертор 17, сумматоры 18, 19 и 20. При изменении входного сигнала блока в диапазоне (O...PJB напряжение, снимаемое с источника 16, должно быть равно U . Это напряжение подается на один вход сумматора 20, а через инвертор 17 на первые входы сумматоров18 и 19. На выходах сумматоров 18 и 19 образуются соответственно напряжения ( U -U) и (UI-LD, большее из которых прохо- дит на вход суммаотра 20, где склады вается с напрянсением U источника 16. На выходе сумматора напряжение равно меньшему из входных напряжений и и ULУстройство работает следующим о5разюл. Генератор 1 соединен с управляющей о&лоткой шагового искателя через контакт 14, реле 14п. При работе генератора 1 якорь шагового искателя перемешает шетки так, что во время дейс- вия i -ого импульса шетки целителей находятся на | -ых ламелях и с них снимаются напряжения tJAH tl%.
Величина tJA подается на один вход блока 5 выбора минимального сигнала и через инвертор б - на вход сумматора 9. Величина tjb подается на вторые входы схемы 5 и сумматора 9.
С выхода блока 5 величина, равная (tJN ,tjb), подается на один вход сумматора 8, на второй его вход подается отрицательная величина, равная - М Вследствие свойства инверсии на выходе сумматора 8 формируется положительная величина.
t М- min (tjA, t|b)
Выход сумматора 9 подключен к упра ляющей обмотке поляризованного реле 10. Если tU , якорь Ю поляризованного реле 10 находится в нейтральном, положении, если tJHr нижнем положении; то при этом выход сумматора ра 8 подключается к входу блока 11.папамяти, через инвертор 7 при якорь 1О поляризованного реле находится в верхнем положении и выход сумматора 8 подключается к входу блока 1 памяти непосредственно.
Работа инерционных звеньев 14/, 142., . 14п блока 11 памяти управляется импульсами распределителя 4 импульсов, вход которого подключен к выходу генератора 1 )1мпульсов.
В исходном положении все инерционные звенья находятся в режиме хранения, а их выходное напряжение интеграторов равно нулю. Установка исходного положения осуществляется нажатием кнопок 15.
Пусть -ый импульс генератора 1 .через распределитель 4 импульсов поступает на обмотку реле 14j . Его контакты 14i переводят инерционное звеко в режим слежения и оно заряжается до напряженияTM rnin(ti«,tJ6)l поступаюшего с выхода сумматора 8. При этвдА, , выходное напряжение сумматора 8 инвертируется дважды инвертором 7 и инерционным звеиом 13р, поэтому звено 13 j заряжается до величины a)(j М - min ( tjA ; tjft)
Если t.j А Ij 6, выходное напряжение сумматора 8 инвертируется Только в
самом инерционном звене 13, и оно заряжается до величинь
и)ф -еи-mn(ti, 1|%)г
Если tjA tib , контакты пoляpвзoвatfного реле находятся в нейтральном положении, звено 13 отключено от сумматора 8, а его выходное напряжение равно напряжению в исходиом положенпи, т. е. нулю.
По окончании действия t -ого илпупьса реле 14 обесточено, его контакты возвращаются в исходное положение и переводят звено в режим хране1тя, при этом оно запоминает величину (jK сформированную в соответствии с формулой (1).
При срабатывании реле 14празмыкается его нормально замкнутый контакт 14 на выходе шагового искателя 2 и отключает его от генератора 1.
Измерив с помощью измерительного прибора 12 все величинь ОЗ ( 1 , 1,2 ..., п и упорядочив номера изделий; v в порядке неубывания величин сО П ), получают последовательность их обработки, при которой минимизируется максимальна длительность обработки всех изделий.
Устройство можно также использовать для определения оптимальной последовательности обработки г изделий на трех машинах, если выполняются следующие условия.
Пусть tj4 , tlb и lie - время об, ччо
работки -ого изделия на машинах А, В и С соответственно. Тогда, если mint jj max tjb u i inl с maxtiib, алгоритм остается тем же самым, что и для системы из двух машин, но величину tiN необходимо заменить величиной tiA+ tj а величину tlb - величиной tib -i-tic.
Формула изобретения
Аналоговое устройство для минимизации длительности обработки нздепий в конвейерной системе, содержащее генератор импульсов; отходы которого соединены соответственно с входом распределителя импудьсов и через замыкающий контакт реле с управляющей ообмоткой шагового искателя, механически связанного с подвижными контактами двух делителей напряжения, о т л и ч а ю-f щ е е с я тем, что, с целью упрощения устройства, оно содержит два инвфтора. два сумматора, поляризованное реле, блок памяти и блок выбора минимального.
сигнала, вхоаы которого подключены к выходам целителей напряжения соответственно, а выход соединен с первым входом первого сумматора, второй вход которого является управляющим входом устройства, первый вход второго сумматора подключен к выходу первого делителя напряжения, выход второго делител напряжения через инвертор соединен с вторым входом второго сумматора, выход которого подключен /к управляющей обмотке поляризованного реле, выход первого сумматора через переключаю щий контакт поляризованного реле соединен с вы содом и входом второго инвертора, выход которого соединен с информационным входом блока памяти, управляющие входы которого подключены к выходам распредепителя импульсов соответственно, выходы блока памяти являются выходами устройства.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 690505, кл. G Об G 7/122, 1979.
2.Авторское свидетельство СССР № 365711, кл. & 06 F 15/20, 197:3 (прототип).
min(u ,1/2

| название | год | авторы | номер документа |
|---|---|---|---|
| Аналоговое устройство для динамического моделирования обработки изделий в конвейерных системах | 1980 |
|
SU926685A1 |
| Устройство для решения задач теории расписаний | 1982 |
|
SU1078441A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1646036A2 |
| Устройство для вычисления оптимального распределения нагрузок на теплоэлектроцентрали | 1972 |
|
SU475632A1 |
| Устройство для вычисления оптимального распределения нагрузок на теплоэлектростанции | 1972 |
|
SU485491A1 |
| Устройство для размагничивания постоянных магнитов до заданной величины намагниченности | 1973 |
|
SU511636A1 |
| Устройство для контроля работы бункерной текстильной машины | 1988 |
|
SU1516529A2 |
| Автоматический прямоугольно-координатный компенсатор | 1961 |
|
SU146872A1 |
| Устройство для контроля психофизиологического состояния обучаемых | 1984 |
|
SU1231530A1 |
| Генератор напряжения ступенчатой формы | 1983 |
|
SU1113814A2 |