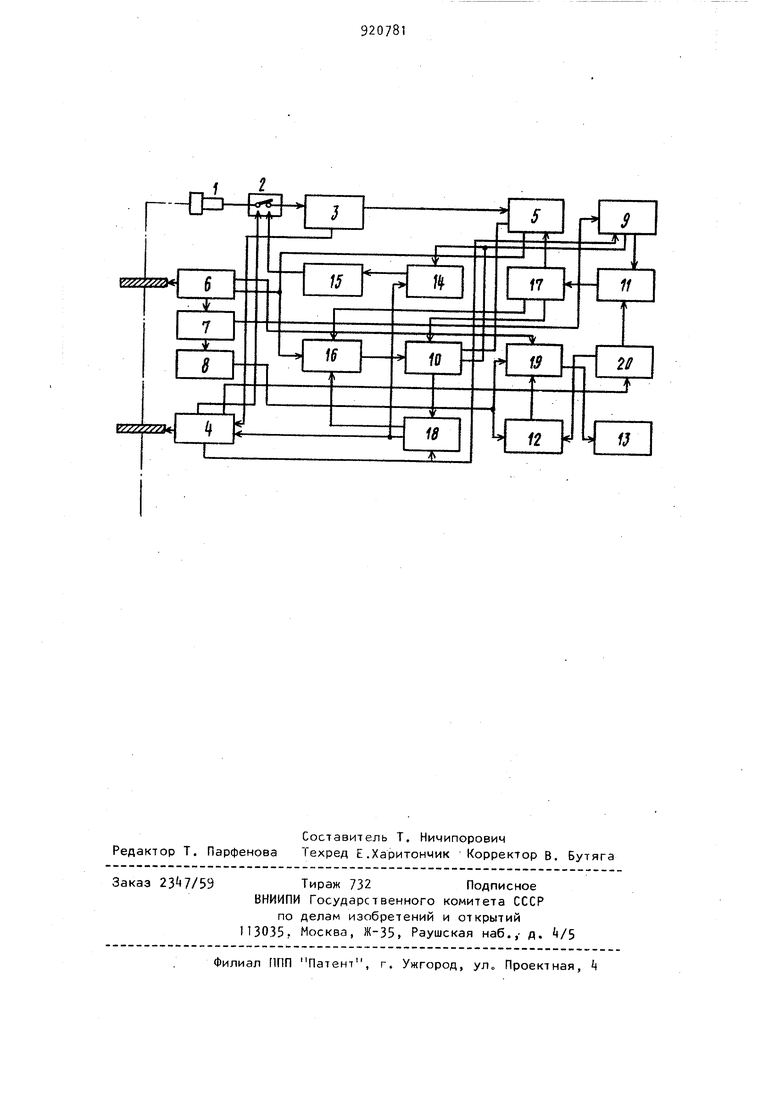
Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для поиска и считывания изображений микрообъектов„ Известно устройство для поиска и считывания изображений микрообъектов, которое содержит блок сканирования, соединенный с блоком сравнения с поро говым уровнем, выход которого соединен с блоками памяти, вычислительный блок, входы которого подключены к бло кам памяти, управления и синхронизации, блок задержки, триггеры, элементы И и ИЛИ tn. Недостаток этого устройства заключается в его невысокой точности. Наиболее близким к изобретению является устройство, содержащее блок сканирования, соединенный с первым и вторым блоками сравнения, фотоэлектри ческий преобразователь, выход которого через ключ подключенный к счетчику и к блоку сканирования, соединен с первым бпоком сравнения, логические блоки, входы которых подключены к первому блоку сравнения и к первому блоку памяти соответственно, блок формирования следящей развертки, вычислительные блоки и блоки памяти Г2. Недостаток известного устройстваневысокое быстродействие устройства; Целью изобретения является повышение быстродействия устройства. Поставленная цель достигается тем, что в известное устройство, содержащее ключ, входы которого соединены с фотоэлектрическим преобразователем, с блоком сканирования и с первым счетчиком, а выход подключен к первому блоку сравнения, соединенному с блог ком сканирования и с первым селектором, первый блок памяти, подключенный к блоку формирования следящей развертки, вход которого соединен с первым селектором, к первому вычислительному блоку и к второму селектору, второй блок памяти, соединенный с первым и с вторым селекторами и с вторым блоком сравнения, подключенным к блоку сканирования, выход которого соединен с вторым селектором, второй вычислительный блок, подключен ный к третьему блоку памяти, к блоку сканирования и к четвертому блоку памяти, вход которого соединен с первым вычислительным блоком, и пятый блок памяти, введены второй счетчик, входы которого соединены с первым селек тором.и с вторым блоком сравнения, а выход подключен к второму блоку.памя ти, блок вычитания, соединенный с первым счетчиком, с вторыми селектором и с блоком сравнения, третий блок сравнения, входы которого подключены к блоку формирования следящей развертки, к первому вычислительному блоку и к четвертому блоку памяти, а выход соединен с пятым блоком памяти и третий селектор, подключенный к первому селектору, к второму счетчику и второму блоку памяти и к третьему блоку памяти, вход которого соединен со вторым селектором. На чертеже представлена блок-схема устройства. Она включает фотоэлектрический преобразователь 1, ключ 2, первый блок 3 сравнения, выполняющий функции компаратора уровня, блок Ц сканирования, первый селектор 5, выделяющий признаки опасных объектов, блок 6 формирования следящей развертки, первый блок 7 памяти, первый вычислительный блок 8, второй селектор 9, выделяющий признаки опасных зон. второй блок 10 памяти, третий блок 11 па памяти, четвертый блок 12 памяти и пятый блок 13 памяти, блок 1 вычитания, первый 15 и второй 16 счетчики, третий селектор 17 текущих опасных зон, второй 18 и третий 19 блоки сравнения, второй вычислительный блок 20. Устройство работает следующим образом. В процессе сканирования поля объектов на выходе фотоэлектрического преобразователя 1 появляется видеосигнал, который через нормально замкнутый ключ 2 блокировки поступает, на блок 3, где сравнивается с уровнем объекта. В случае превышения видеосигнала уровня на блок k выдается сигнал Фон и продолжается поиск объектов, В противном случае поиск объектов приостанавливается и выдает92ся сигнал Объект на первый селектор 5. Если на текущей cтopo e нет оанее проанализированных объектов, селектор 5 выдает в блок 6 сигнал начала слежения. В процессе слежения в блоке 7 появляются значения Х-координат левых и правых точек пересечения контура со всеми последующими строками поиска. Кроме этого, в блоке 8 вычисляются значения габаритных размеров микрообъекта X и Y: X Хгг,0х- Xmin mdx rnin тах тач максимальные, а Х„;;„, Ymin минимальные координаты множества точек контура микрообъекта о Во второй селектор 9 поступае Х-координат а точки встречи Х из блока k сканирования. На основании этой информации выбираются координаты начала и конца опасных зон. Полученные таким образом К опасных зон микрообъекта приписываются виде столбца справа в матрицу опасных зон, которая хранится в блоке 10, причем в конце столбца записываются нули. Одновременно из блока 8 поступают величины X и Y в блок 12, где они запоминаются, и в блок , где они сравниваются со всеми хранящимися там габаритами. Если новые X и У не совпадают ни с одними из предыдущих, блок 11 выдает сигнал Новый объект в блок 13. Координаты первой опасной зоны из селектора 9 поступают в блок 1, откуда разность этих координат поступает на счетчик 15 выхода из объекта, который размыкает ключ 2 на время прохождения опасной зоны. Этим исключается повторный захват объекта на текущей строке flo окончании строки сканирования, из блока i поступает сигнал Конец строки на блок 20. Этот блок осуществляет сдвиг матрицы опасных объектов на одну строку вверх, после чего уплотняет матрицу, влево, стирая столбцы, в которых первые элементы нули, В блоке 12 стираются габариты соответствующих объектов. Тем самым из памяти исключаются объекты, оказавшиеся целиком выше текущей строки. Первая строка матрицы из блока 11 поступает в селектор 17. После этого селектор 17 подсчитывает, сколько опасных объектов осталось в памяти. Если это число не нуль, выставляется признак опасных объектов в блок 5. первая строка матрицы из селектора 17 переносится в блок 10, а число опасных объектов заносится в счетчик опасных объектов 16.
Если же теперь на новой строке встретится объект, селектор 5 выдает сигнал на блок 10. С блока 10 на блок сравнения 18 Х-координат поступают координаты начала и конца опасных зон, а с блока сканирования координаты точки встречи Х. Блок сравнения Х-координат 18 проверяет, попала ли точка встречи в первую текущую опасную зону. Если нет, содержание счетчика 16 опасных объектов уменьшается на единицу, и с блока 10 поступают координаты следующей опасной зоны микрообъекта и т. д.
Если встретился новый объект, точка встречи не попадает ни в одну из опасных зон, счетчик 16 при этом обнуляется и выдает сигнал запуска слежения в блок 6. Если же на каком-то шаге в блоке сравнения 18 Х-координат условие выполняется, на блок k из блока 18 поступает сигнал, разрешающий дальнейший поиск, а на блок }k поступают координаты соответствующей опасной зоны, счетчик 15 посредством ключа 2 заблокирует подачу видеосигнала, и объект будет пройден без измерения интенсивности света.
Таким образом, введение новых блоков и новых конструктивных связей позволяет получить качественно новую характеристику системы. Достоверность однократного и беспропускного считывания информации о поле микрообъектов, превышающем поле зрения микроскопа, в условиях сильной вариабельности размеров и Формы микрообъектов позволяет повысить быстродействие процесса считывания информации.
Формула изобретения
Устройство для поиска и считывания изображений микрообъектов, содержащее ключ, входы которого соединены с фотоэлектрическим преобразователем с блоком сканирования и с перым счетчиком, а выход подключен к первому блоку сравнения, соединенному с блоком сканирования и с первым селектором, первый блок памяти, подключенный к блоку формирования следящей развертки, вход которого соединен с первым селекторюм, к первому вычислительному блоку и к второму селектору, второй блок памяти, соединенный с первым и с вторым селекторами исс вторым блоком сравнения, подключенным к блоку сканирования, выход которого соединен с вторым селектором, второй вычислительный блок, подключенный к третьему блоку памяти, к блоку сканирования и к четвертому блоку памяти, вход которого соединен с первым вычислительным блоком, и пятый блок памяти, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит второй счбтуик, входы КОТОРОГО соединены с первым селектором и с вторым блоком сравнения, а выход подключен к второму блоку памяти, блок вычитания, соединенный с первым счетчиком с вторым селектором и с блоком сравнения, третий блок сравнения, входы которого подключены к блоку формирования следящей развертки, к первому вычислительному блоку и к четвертому блоку памяти, а выход соединен с пятым блоком памяти, и третий селектор подключенный к первому селектору, к второму счетчику и второму блоку памяти и к третьему блоку памяти, вход которого соединен с вторым селектором.
Источники информации, принятые во внимание при экспертизе
1.Патент США W 3935562, кл. ,3/. опуЬлик. 1976.
2.Патент США ff 3908078,
кЛи 178.6, опублик. 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания и распознавания изображений микрообъектов | 1980 |
|
SU898466A1 |
| Устройство для подсчета плоских предметов | 1981 |
|
SU1005111A1 |
| Устройство для подсчета количества объектов | 1990 |
|
SU1756912A1 |
| Устройство для считывания графической информации | 1981 |
|
SU985801A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1084835A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 1991 |
|
RU2022366C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1992 |
|
RU2045781C1 |
| Устройство для считывания графической информации | 1982 |
|
SU1037295A1 |
| Устройство для считывания изображений микрообъектов | 1983 |
|
SU1160450A1 |
| Устройство для селекции изображений объектов | 1986 |
|
SU1429141A1 |