Изобретение относится к преобразо нательной технике, в частности к способам управлений выходной мощностью инвертора, и может использоваться в технологических процессах, требующих одновременного и независимого регулирования мощности двух индукционных нагревателей, питающихся от одного автономного инвертора.
Известен ряд способов управления преобразователем, нагруженным на ,, нагрузки, сущность которых заключается в том, что каждую из нагрузок подключают через дополнительные ти-. ристорные ключи к выходу инвертора, и управление тиристорными ключами ведут в функции регулируемых электри ческих параметров нйгрузок .
Однако эти способы характиризуются невысокой точностью, связанной с дйскре гностью подачи мощности-в каждую из нагрузок, а также недостаточной надежностью из-за необходимости использования дополнительных вентильнцх групп.
Наиболее близким к предложейному является способ управления инвертором, нагруженным на два последовательно включенных колебательных коитура, настроенных на различные резонансные частоты, путем изменения частоты инвертора 4.
Для осуществления зтот способ не требует дополнительного вентильного оборудования, однако он основан на поочередной подаче энергии в нагрузки, что снижает точность поддержания электрических параметров нагрузок на заданном уровне., Кроме того, рез10кая перестройка частоты инвертора с одной резонансной частоты на другую приводит к возникновению повышенных напряжений на элементах схемы инвертора в переходном процессе, а
15 также к электродинамическим ударам на элементы конструкции индукционных нагревателей и нагреваемые тела, что снижает надежность работы установок, работающих по такому способу.
20
Цель изобретения - повышение точ,ности и надежности способа.
С этой целью при управлении инвертором, нагруженным на два последовательно включенных колебательных
25 контура известным способом, непрерывно контролируют регулируемый электрический параметр каждой из нагрузок, определяют отклонение каждого из нихот соответствующей заданной величины
30 и-при совпадении знаков обоих отклонений изменяют величину выходного напряжения инвертора, а при различных знаках упомянутых отклонений изменяю частоту инвертора,причем изменение частоты производят в диапазоне,ограниченном резонансными частотами колебательных контуров.
Кроме того, контролируют фазовый угол каждой из нагрузок, и при достижении одним из них значения, равного его значению при резонансной частоте дополнительно изменяют частоту инвертора.
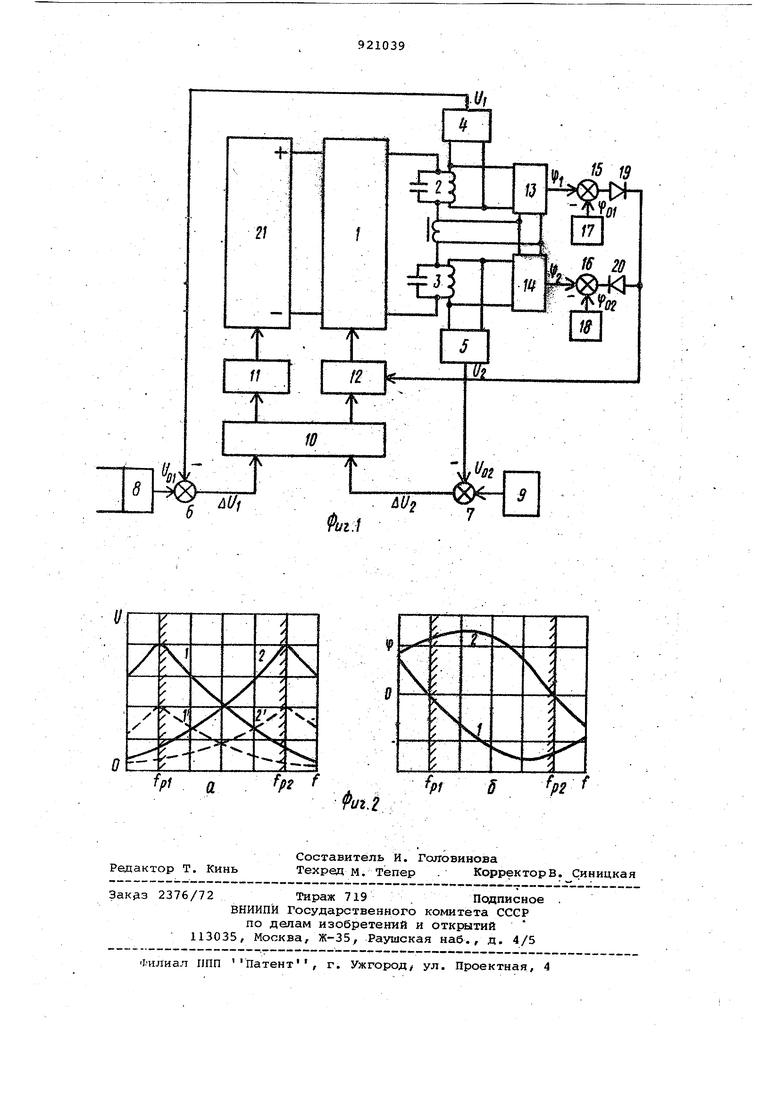
, На фиг. 1 приведена блок-схема системы автоматического управления, с помощью которой может быть реализовай способ; на фиг. 2 - частотные характеристики нагрузок (DL- по напряжению, § - по фазовому углу) .
К выходу автономного инвертора 1 подключены резонансные нагрузки 2 и 3, каждая из которых представляет собой колебательный контур,.состоящий из индуктора, шунтированного батареей компенсирующих конденсаторов, С нагрузками связаны датчики 4 и 5 регулируемого электрического параметрд, выходы которых связаны с элементами сравнения, на другие входы которых поданы сигналы с задатчиков 8 и 9. Выходы элементов сравнения 6 и 7 связаны с первым и вторым входами управляющего устройства 10, выходы которого связаны с регулятором 11 выходного напряжения и первым выходом регулятора 12 частоты инвертора. Датчи ки 13 и 14 фазовых углов нагрузок связаны своими входами с соответствующими нагрузками, а выходами - с элементами 15 и 16 сравнения на другие входы которых поданы сигналы задатчиков 17 в 18 фазовых углов, а выходы элементов 15 и 1 сравнения через вентили 19 и 20 связаны со вторым входом регулятора 12 частоты.
Способ управления-инвертором 1, нагруженным на два колебательных контура, резонансные частоты которых fp и fpj отличаются друг от друга, заключается в том, что с помощью датчиков 4 и 5 непрерывно контролируют регулируемые электрические параметры нагрузок, например напряжение U, сравнивают их в элементах сравнения 6 и 7 с сигналами задатчиков 8 и 9 Uo, и Uo2 , определяют отклонения от заданных значений Uo4 -U и At Uo2-U2 и в зависимости от знаков и величин этих отклонений с помощью регулятора 12 частоты и регулятора 11 напряжения изменяю.т частот и напряжение инвертора 1. Причем с помощью управляющего устройства 10 при совпадении знаков лИл и д.и2 изменяют выходное напряжение U, а при появлении сигналов д.и и . различных знаков изменяют частоту f инвертора 1, при этом изменение частоты f ведут в диапазоне, ограниченном резонансными частотами fp и fn нагрузок 2 и 3.
Во время предварительной настройки фиксируют значение фазовогоугла фр каждой нагрузки, измеренное в момент перехода через максимум регулируемого электрического параметра данной нагрузки, т.е. угол соответствующий резонансной частоте, а зате: в процессе регулирования с помощью датчиков 13 и 14 контролируют фазовый угол Р каждой из нагрузок и при достижении им зафиксированного значения (fp дополнительным изменением частоты f стабилизируют это значение Дополнительное изменение частоты f производится путем воздействия на второй вход регулятора 12 частоты сигналом, поступающим через вентили 19 и 20 с элементов 15 и 16 сравнени осуществляющих вычитание из сигналов фазовых углов f и fg сигналов их зафиксированных значений р и (Cpj, поступающих от задатчиков 17 и 18.
Система автоматического регулирования, изображенная на фиг. 1, является двухмерной системой, в которой перераспределение выходной мсмцности инвертора I между нагрузками производится за счет соответствующего изменения частоты и напряжения инвертора, в системе происходит независимое регулирование, т.е. поддёркание на заданном уровне напряжений двух нагрузок. При необходимости вместо напряжения может регулироваться другой электрический (ток, мощность) или связанный с ним технологический (температура нагреваемого в индукторе тела) параметр. Изменение частоты легко осуществляется изменением периода следования импульсов задающего генератора, схемы управления инвертора, а изменение напряжения может производиться как за счет регулирования напряжения, питающего инвертор с помсадью управляемого выпрямителя 21, так и другими известными методами, в которых регулирование вы ходной мощности инвертора совмещено с процессом инвертирования (метод геометрического суммирования токов ячеек t широтно- импульсный и другие методы) .
В устройстве 10 управления происходит определение знаков отклонений регулируемых параметров от заданных значений. В зависимости От конкретного сочетания этих знаков устройство 10 управления переводит систему либо в режим изменения-напряжения, либо в режим изменения частоты. Совпадение знаков отклонений лОд и u.Ua. свидетельствует об одновремеином недостатке или избытке величины регулируемого параметра в обеих нагрузкак, поэтому в такой ситуации устройство управления производит изменение напряжения инвертора. При различный знаках отклонений в одной нагрузке выделяется недостаточная, в другой избыточная мощность, поэтому устройство 10 управления, изменяя частоту инвертора, перераспределяет мощность между нагрузками (кривые на фиг. 2а) Переключение системы из одного режима в другой происходит вплоть до исчезновения отклонений.
Объектом регулирования в системе является комплекс инвертор - распределенная нагрузка, причем объект этот двухмерный, поскольку имеет две выходные величины } и U и два входных воздействия - частоту f и напряжение U. Изображенные на фиг.2а частотные характеристики объекта регулирования являются его статистическими характеристиками. Здесь 1 напряжение первой, 2 - напряжение второй нагрузки Г и 2 - те же напряжения при вдвое меньшем выходном напряжении инвертора. Из-за, наличия экстремумов на статических характеристиках объект регулирования является существенно нелинейным, так как его статические характеристики неоднозначны (одному и тому же значению напряжения соответствуют два значеВИЯ частоты). Очевидно, что осуществление предлагаемого способа регулирования возможно лишь в диапазоне частот между экстремумами статических характеристик fp ..,р , за пределами которого нарушается устойчивость регулирования (область, отмеченная штриховкой на фиг. 2л,S) Так как резонансные частоты нагрузок в процессе регулирования могут в некоторых пределах изменяться, необходимо следить за этим изменением и не допускать частоту инвертора за пределы указанного диапазона. В системе показанной на фиг. 1, это обеспечивается дополнительным воздействием н частоту сигналом, поступающим на второй вход регулятора 12 частоты через вентили 19 и 20. В данном примере, зафиксированные значения фазог вых углов «Ppt, и iflpz равны нулю (кривые фиг. 2а). При достижении частоты fp сигнал 4(««Pi- ft i становится положительным и через вентиль 19 препятствует дальнейшему снижению частоты. Аналогично при переходе через частоту fp2 открывается вентиль ,20 и отрицательный сигнал (Va ограничивает частоту сверху. В диапазоне частот fp.,.fp2 вентили 19 и 20 закрыты и обратные связи по фазовым углам разомкнуты.
Использование предложенного способа позволяет увеличить точность поддержания регулируемого параметра нагрузок по крайней мере в 10 раз, так как означает переход от позиционного к непрерывному регулированию. В частности при регулировании температуры в индукционных печах появляется возможность замены следящих потенциометров высокочастотныю регуляторами температурл. При испытаниях способа получена точность tO,5 вместо 15° по известному способу. Помимо повышения точности значительно повышается надежность работы оборудования за счет устранения импульсных нагрузок на его элементы.
Формула изобретения
1. Способ управления инвертором, нагруженным на два последовательно включенных колебательных контура, настроенных на различные резонансные частоты, путем изменения частоты инвертора /отличающийся тем, что, с целью повышения точности и надежности, непрерывно контролируют регулируелвлй электрический параметр каждой из нагрузок, определяют отклонение каждого из них от соответствующей заданной величины и при совпадении знаков обоих отклонений изменяют величину К1ХОДНОГО напряжения инвертора, а при различных знаках упомянуоих отклонений изменяют указанную частоту инвертора, причем изменение частоты производят в диапазоне, ограниченном резонансными частотш4И колебательных контуров.
2. Способ по п. 1, отличающийся тем, что контролируют фазовый угол каждой из нагрузок, и при достижении одним из них значения, равного его значению при резонансной частоте,, дополнительно изменяют частоту инвертора.
Источники информации, принятые во при экспертизе
1.Патент Японии 51-28133, кл. Н 02 М 7/48, 1976..
2.Патент США 3717807, кл. Н 02 М 7/48, 1970.
3.Патент США 3925633, кл. Н 05 В, 1975.
4.Авторское свидетельство СССР № 647815, кл. Н 02 Р 13/18, 1975.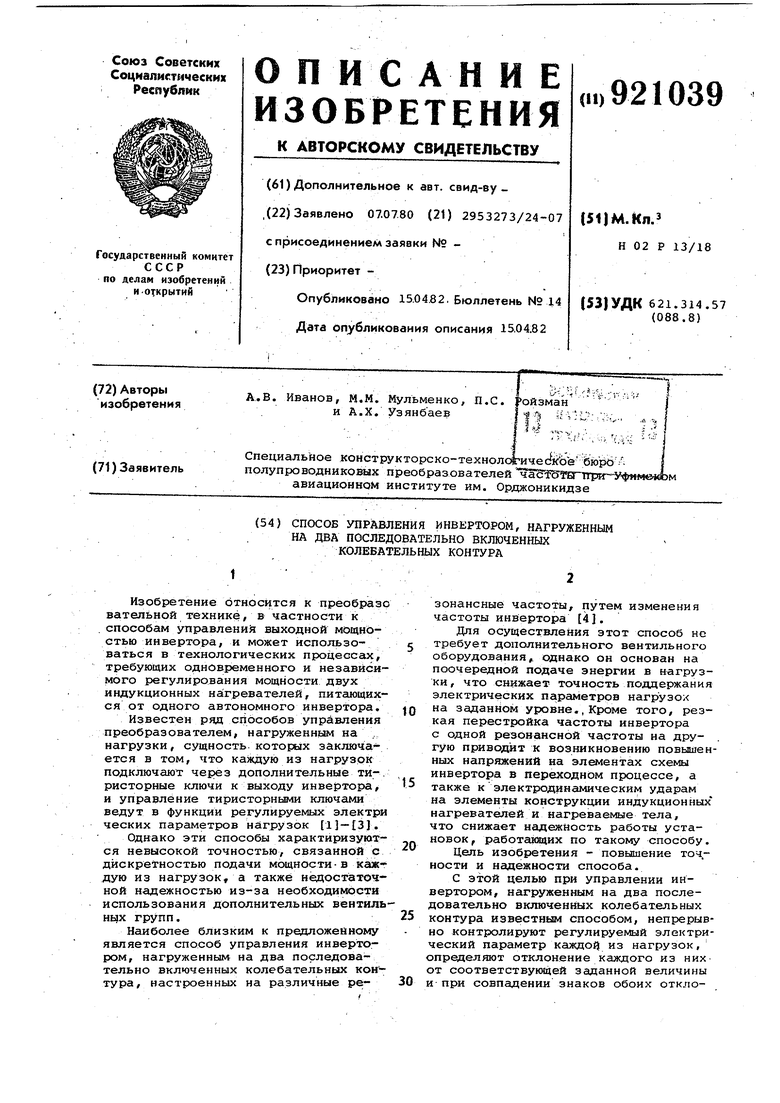
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления инвертором при его работе на два колебательных контура, предварительно настроенных на различные высоты | 1980 |
|
SU909794A1 |
| Способ управления инвертором с несколькими резонансными нагрузками | 1987 |
|
SU1415385A1 |
| Способ распределения мощности инвертора между двумя нагрузками | 1981 |
|
SU1034143A1 |
| Двухзонная установка для индукционного нагрева | 1983 |
|
SU1092758A1 |
| Способ распределения выходной мощности инвертора | 1980 |
|
SU928608A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2011 |
|
RU2454782C1 |
| Способ регулирования мощности инвертора | 1979 |
|
SU788305A1 |
| Индукционная установка повышенной частоты для непрерывной варки оптического стекла | 1980 |
|
SU955525A1 |
| Способ регулирования электрического режима индукционной электротермической установки | 1989 |
|
SU1725405A1 |
| Способ регулирования электрических параметров преобразователя частоты с резонансной нагрузкой | 1977 |
|
SU748727A1 |