ел
со
00 01
Изобретение относится к преобра- зоватси ьной технике и может быгь использовано при создании нитомати- аировапньгх систем управления индукционными установками, питающимися током повышенной частоты с одновременным и независимым pei-улированием режимов нескольких резонансных нагрзок и соответствующих им технологи- ческих зон,
Цель изобретения - упрощение и повьппение надежнос ти.
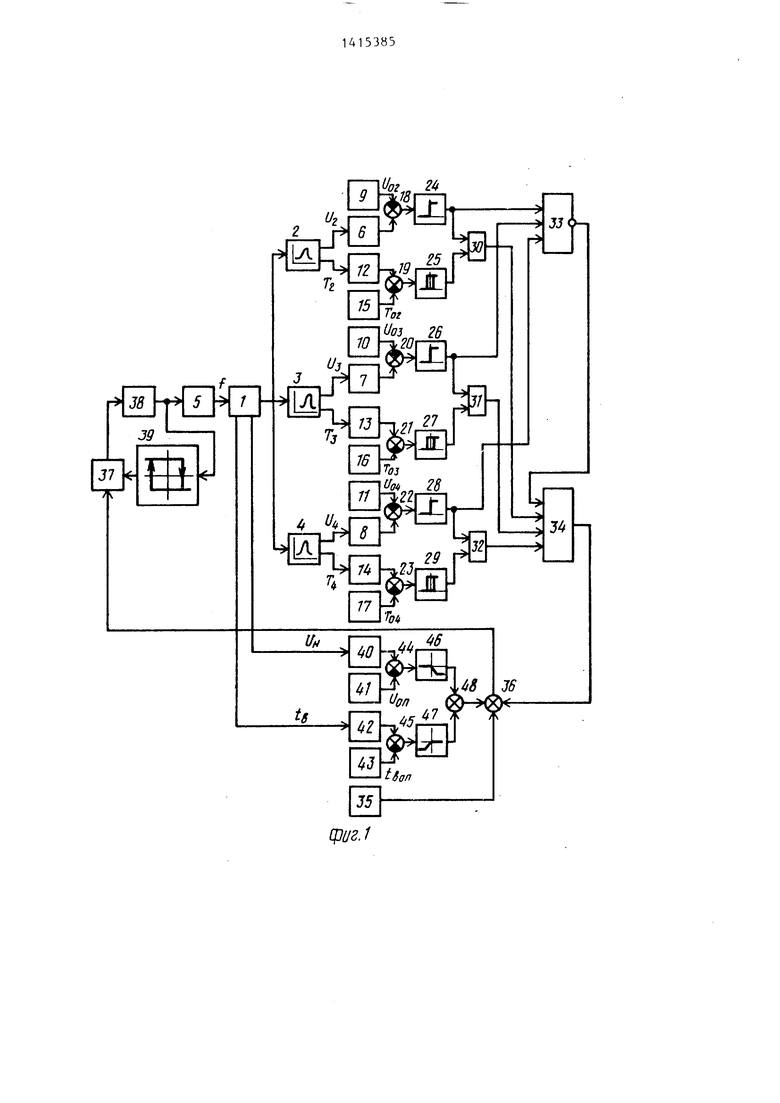
На фиг, 1 показана структурная схема CHcreNfoi управления, с помощью которой может быть реализован спосо для случая распределения мощности между тремя нагрузками; на фиг, 2 - диаграммы, иллюстрирующие осуществлние способа,
Система управления (фиг, 1) инветором 1 с резонансными нагрузками 2-4 состоит из задающего генератора 5, датчиков 6-8 и задатчиков 9-11 электрических параметров нагрузок,
датчиков 12-14 и задатчиков 15-17 технологических параметров, элементов Т8-23 сравнения, релейных элементов 24-29, элементов И 30-32, элементов ИЛИ-НЕ 33 и ШШ 34, задатчика 35 нижнего предела скорости изменения частоты, сумматора 36, блока 37 умножения, интегратора 38, триггерного элемента 39, датчика 40 и задатчика 41 напряжения J на силовом элемен- те инвертора (тиристоре или дросселе), датчика. 42 и задатчика 43 времени восстановления t, элементов 44 и 45 сравнения, нелинейных элементов 46 и 47 и cvMMaTopa 48,
..
Электрическим параметром U нагрузок может быть напряжение или ток индуктора, а технологическим Т - температура нагреваемого объекта.
Способ упраБления инвертором 1 с резонансными нагрузками 2-4, настроенными на различные частоты fpo, fp, , fp (диаграммы, фиг, 2), заключается в циклическом изменении частоты выхсчдного тока инвертора в диапазоне f,,jn -f .«кс, охватывающем ми- нимальную (fp;) и максимальн%то fp4) резонансные частоты нагрузок, при этом с помощью датчиков 6-8 и 12-14 контролируют электрический (U, Uj, U) и технологический (Т,, Т, Т) параметры нагрузок 2-4, сравнивают их с заданными значениями (сигналы задатчи ;ов 9-11 1 о 3 - Uo, 1 п4 сиг
д
5 20
25
ЗО
0
0 5
5
налы задатчиков 15-17 -1 , Т, Т и в функции сигналов отклонений, получаемых на выходе элементов 18-23 сравнения, изменяют частоту выходного тока f, равную или кратную частоте задающего генератора 5, изменение частоты f в течение каждого цикла производят начиная с нижнего мчи верхнего предела диапазона частот непрерывно и монотонно со скоростью, ограниченной нижним и верхним пределами, а в моменты t, , t,4 , t,( , L jg, t,, t,3,
tj4 достижения противоположных пределов диапазона частот знак скорости меняют на противоположный, причем при отрицательных отклонениях электрических параметров всех нагрузок 2-4 от своих заданий (Uj UQJ, Uj ,, U ; Ug) скорость изменения частоты устанавливают на верхний предел (интервалы , , , , t g
t 1i IS H
. a при наличии положительного отклонения электрического параметра скорость изменения частоты изменяют в функции отклонения соответствующего технологического параметра от своего задания TOJ ,
Закон регулирования скорости изменения частоты в функции отклонения технологического параметра может быть как непрерывным (например, пропорциональным), так и релейным, В частности, в системе (фиг, 1) реализуется релейный закон регулирования скорости изменения частоты f задающего генератора 5, обеспечивающейся релейными элементами 25, 27 и 29, управляющими скоростью изменения частоты.
Цикл изменения частоты (фиг, 2) начинается в момент t,,, начиная с нижнего предеда диапазона частот Выходной сигнал интегратора 38
л.С(г, С/ ta« ,t.,
-n - f8 - 10 - 2) - 24
U3,. Ujg.
I
I -зП
де U
39
выходной сигнал триггеров элемента, принимающий значения + 1 и;1и -1 в моменты достижения нижнего и верхнего iipi:MU . u-n диапазона частот;
К. - коэф(});1иис1п- передачи ин- тегрлт; ;,.-,
Jj - выходной сигнал сумматора 36.
На интервале параметры U2 , Из, U
J - электрические
j всех нагрузок меньше заданных пороговых уровней 02 0 04, выходные сигналы элементов 24, 26 и 28 сравнения отрицательны, выходные сигналы элементов И 30-32 имеют низкий уровень, а выходной сигнал элемента ИЛИ-НЕ- 33 имеет высокий уровень, который через элемент ШШ 34 и сумматор 36 поступает на вход блока 37 умножения, на втором входе которого присутствует сигнал +1. Благодаря этому на интервале tj-t скорость изменения частоты положительна и соответствует своему верхнему пределу.
На интервале t,-t,j (вблизи резонанса нагрузки 2) становится положительный сигнал элемента 18 сравнения и на выходе релейного элемента 29 появляется сигнал высокого уровня При этом выходной сигнал элемента ИЛИ-НЕ 33 принимает низкий уровень логического нуля, а на в ыкоде элемента ИЛИ 34 появляется сигнал низкого уровня, поскольку на выходе релейного элемента 25 нулевой сигнал (Т2 - cTj) и на выходе элемента И 25 - сигнал низкого уровня. Таким образом на интервале скорость изменения частоты определяется выходным
сигналом задатчика 35 нижнего предела скорости изменения частоты. В течение этого интервала инвертор работает на частоте, близкой к резонансной частоте нагрузки 2|И в ней выделяется большая часть выходной мощности инвертора (небольшая часть мощности вьщеляется в других нагрузках, включенных последовательно между собой и с нагрузкой 2). Длительность интер вала t,-tj зависит от величины задания UQ случае непрерывного закона регулирования технологических параметров длительность интервала выделения мощности в нагрузке 2 зависит от величины отклонения технологического параметра и при отрицательных отклонениях увеличивается, а при положительных - сокращается.
В интервале отклонения электрических параметров всех нагрузок вновь отрицательны (уровень мощности в нагрузках ниже порогового), на всех входах элемента ИЛИ-НЕ 33
0
5
0
5
0
5
0
5
0
5
нулевые сигналы, и на его выходе - сигнал высокого уровня, который че-, рез элементы 34, 36 и 37 воздействует на интегратор 38, устанавливая верхний предел скорости изменения частоты задающего генератора 5.
При подходе к резонансной частоте нагрузки 3 f р в течение интервала вновь устанавливается нижний предел скорости изменения частоты, при этом мощность инвертора вьщеляется преимущественно в нагрузке 3.
На интервале , когда уровень параметра U становится ниже порогового значения U, происходит изменение частоты с максимальной скоростью.
На интервале t , вновь устанавЬ о
ливается нижний предел скорости роста частоты, мощность вьщеляется преимущественно в нагрузке 4.
После,снижения параметра Цд ниже порогового уровня и 0 в момент tj частота с максимальной скоростью доходит до верхнего предела диапазона частот f,o(Kc момент t-j происходит переключение триггерного элемента 39, благодаря чему знак изменения скорости меняется на отрицательный - частота начинает снижаться. Вторая половина цикла изменения частоты (фиг. 2) симметрична первой половине t(-t-, и отличается от нее лишь знаком скорости изменения частоты.
Возможен вариант способа, при котором в момент достижения одного из пределов диапазона частот, например в момент t-, одновременно со сменой
знака скорости изменения частоты изменением знака выходного сигнала триггерного элемента 39 устанавливают величину этой скорости на верхний предел вплоть до момента достижения противоположного предела диапазона частота f д,цн этом варианте спосог- ба в системе при отрицательном выходном сигнале триггерного элемента 39 на другой вход блока 37 умножения независимо от сигнала сумматора 36 подают сигнал высокого уровня, соответствующий верхнему пределу скорости изменения частоты и происходит быстрый возврат частоты на уровень (штриховая линия на диаграмме частоты f, фиг. 2). Если в первом варианте способа подача импульсов мощности в разные нагрузки происходит
через различны ингор1залы премени для нагру:тк, настроенных на верхнюю и tiижнюю резонансные частоты, период этих импульсов практически совпадает с временем цикла, то во втором варианте период следования импульсов мощности для каждой нагрузки постоян- ньш и близок к длительности полуцикла для первого варианта. Благодаря более в 1сокой и одинаковой для всех нагрузок частоте следования импульсов мощности Р амплитуда пульсаций технологических параметров во втором варианте меньшие почти в 2 раза.
Недостатком этого варианта является несколько пониженная по сравнению с первым вариантом мощность, отдаваемая в нагрузки, что обусловлено потерями времени на возврат частоты на нижний предел диапазона частот, во время которого амплитуда колебаний токов и напряжений нагрузок мала что обусловлено инерционностью по- следней.
После того, как технологический параметр (температура нагреваемого объекта) одной или нескольких нагрузок превысит задание, режим работы системы (фиг. 1) становится иным. В частности, при Т. 7 Т Q 2 5 Т; (фиг- 2) снижение скорости изменения частоты имеет место только на интервалах t,-tj. и , , соответствующих прохождению области частот, прилегающей к fp4- При этом мощность преимущественно выделяется в нагрузке 4, а в остальных нагрузках из-за большой скорости изменения частоты вблизи их резонансных частот нарастание колебаний или кратковременно, или незначительно ио амплитуд
После досттгжения всеми технологическими параметрами своих заданий на одной из резонансных частот не производится замедления изменения
частоты, при этом мощность, выделяемая во всех нагрузках, минимальна. В этом режиме ичменение частоты может быть также прекращено в одной из крайних To4tMc диапазона частот. Может быть гц еаус мотреи запрет подачи импульсов уцрлр.пения на инвертор 1 (останов -i/i/uiiouitTi генератора 3), при котором iiiaii.(-Tiiii о и1остью прекращает noTiH 0, ч;;. мощности от источника и iiepc;t п нагрузки.
. ; I lli И Г f .: И 11Ж1 НИ I ТОХНОЛОГИ
чегкчм 1 1 . 1, 1Ч.. ра ()ii-.ain3o из на
0
грузок ниже задания при подходе частоты задающего генератора к резонансной частоте данной нагрузки на выходе соответствующего элемента И появляется сигнал низкого уровня, при этом с выходов остальных элементов И и выхода элемента ИЛИ-НЕ 33 на входы элемента ИЛИ 34 поступают сигналы „ низкого уровня. Поэтому на выходе
элемента 34 появляется сигнал низкого уровня и скорость изменения частоты устанавливается на свой нижний предел, определяемый задатчиком 35. Бла- годаря этому в соответствующую нагрузку поступает импульс мощности.
Таким образом, температура во всех нагрузках поддерживается с определенной точностью, которая обусловлена зоной гистерезиса релейных элементов 25, 27 и 29 и длительностью дикла изменения частоты.
Следует отметить, что верхний предел скорости изменения частоты или g инверторов с входным дросселем ограничен по условиям допустимых перенапряжений на тиристорах и допустимого снижения времени восстановления. При быстром изменении частоты происходят резкие изменения мощности, отдаваемой в нагрузку. При уменьшении мощности электромагнитная энергия, запасенная входным дросселем, переходит в коммутирующий конденсатор инвертора, что вызывает подъем напря- 5 жения на тиристорах. Одновременно увеличивается амплитуда напряжения на самом дросселе. При увеличении потребляемой мощности медленно изменяющийся ток входного дросселя не успевает выполнять увеличивающийся расход энергии, запасаемой коммутирующим конденсатором, происходит снижение напряжения на последнем, а вместе с нкм снижение энергии комму- 5 тации тиристоров и уменьшение времени восстановления. Поэтому целесообразно вариант способа, при котором с помощью датчиков 40 и 42 контролируют амплитуду напряжения на тирис- 0 торе или входном дросселе инвертора и и время, представляемое тиристорам
на восстановление t., сравнивают эти параметры с онги- лами задатчиков 41 и 43, ив случае достижения продельного значеиш :1юб1 1м из этих параметров подлеp iii- нот это предельН(5е значение гир.-л ния верхнего предела cKopvic ги и ( С имя частоты. Bi,i0
5
деление отклонений недопустимого знака н формирование управляющих воздействий обеспечивают нелинейные элементы 46 и 47, выходные сигналы которых через сумматоры 48 и 36 воздействуют на скорость Изменения частоты в сторону снижения.
Предлагаемый способ не требует использования систем автоподстройки частоты инвертора под резонансные частоты нагрузок, критичных к параметрам элементов с точки зрения устойчивости. Это значительно упрощает и повышает надежность применяемого оборудования и самого способа. Кроме того, способ позволяет повысить точность регулирования технологических параметров за счет повышения частоты подачи импульсов мощности в резонансные нагрузки. Способ позволяет использовать как релейные регуляторы температуры, так и высокоточные регулятор непрерывного действия
Формула изобретения
1. Способ управления инвертором с несколькими резонансными нагрузками, настроенными на различные частоты, состоящий в том, что циклически изменяют частоты выходного тока инвертора в диапазоне, охватывающем минимальную и максимальную резонансные частоты нагрузок, контролируют электрический и технологический параметры каждой из нагрузок, сравнивают их с заданными значениями и в функции сигналов отклонений изменяют частоту выходного тока, отличающийся тем, что, с целью упрощения и повьш1ения надежности, изменение частоты в течение каждого
0
цикла производят, начиная с нижнего или верхнего предела диапазона частот, непрерывно и монотонно со скоростью, ограниченной нижним и верхним пределами, а в момент достижения противоположного предела диапазона частот знак скорости меняют на противоположный, причем при отрицательных отклонениях электрических параметров всех нагрузок от своих заданий скорость изменения частоты устанавливают на верхний предел, а при наличии положительного отклонеg ния электрического параметра скорость изменения частоты изменяют в функции отклонения соответствующего технологического параметра от своего задания.
2.Способ по п. 1, отличающийся тем, что, с целью повышения точности регулирования технологических параметров, в момент достижения частотой инвертора одного
5 из пределов диапазона частот одновременно со сменой знака скорости изменения частоты устанавливают величину этой скорости на верхний предел вплоть до момента достижения противоположного предела диапазона частот.
3.Способ по пп. 1 и 2, отличающийся тем, что дополнительно контролируют амплитуду напряжения на силовых элементах инвертора и время, представляемое тиристорам
5 на восстановление запирающих свойств, сравнивают эти параметры с заданными предельными значениями и в случае достижения предельного значения любым из этих параметров поддерживают это предельное значение путем снижения верхнего предела скорости изменения частоты.
0
0
(риг.1
5 ЛГ-
r--f
V7Ji/Z
it
„ : и1Л-Х иЬ-.
F
l
/ tzW, t,ts t,
TZ 01; j o:s: T TC
O f
II
.
«f K/ AH K« /J
F
l
u..

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления инвертором, нагруженным на два последовательно включенных колебательных контура | 1980 |
|
SU921039A1 |
| Двухзонная установка для индукционного нагрева | 1983 |
|
SU1092758A1 |
| Устройство для распределения мощности инвертора между N-нагрузками | 1981 |
|
SU978299A1 |
| Многозонная индукционная нагревательная установка | 1983 |
|
SU1153397A1 |
| Способ распределения мощности инвертора между двумя нагрузками | 1981 |
|
SU1034143A1 |
| КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ | 2001 |
|
RU2187873C1 |
| Способ управления инвертором при его работе на два колебательных контура, предварительно настроенных на различные высоты | 1980 |
|
SU909794A1 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
| Способ управления индукционной нагревательной установкой | 1983 |
|
SU1102057A1 |
| Способ распределения выходной мощности инвертора | 1980 |
|
SU928608A1 |

Изобретение относится к электротехнике и может быть использовано в системах управления инверторами. Цель изобретения - упрощение и повышение надежности. В способе управления инвертором частоту выходного тока инвертора изменяют в течение каждого цикла со скоростью, ограниченной нижним и верхним пределами. В момент достижения противоположного предела диапазона частот знак скорости меняют на противоположный. При отрицательных отклонениях электрических параметров нагрузок от своих заданий скорость изменения частоты устанавливают на верхний предел, а при положительных указанную скорость изменяют в функции отклонения технологического параметра от своего задания. 2 з.п. ф-лы, 2 ил. с Ф сл
/ . ,,f
| Способ распределения выходной мощности инвертора | 1975 |
|
SU647815A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ распределения мощности инвертора между двумя нагрузками | 1981 |
|
SU1034143A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для распределения мощности инвертора между N-нагрузками | 1981 |
|
SU978299A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
