Изобретение относится к области фотограмметрии и может быть реализовано в автоматических стереофотограмметрических приборах, а, также в обзорно-информационных системах автономных кибернетических устройств.
Известен способ, по которому для определения расстояния до некоторой точки наблюдаемого объекта измеряют относительное смещение (параллакс) идентичных точек на стереопаре. При автоматическом измерении координат .точек наблюдаемых объектов с помощью стереосистем устанавливают соответствие (идентификацию) между, изображениями точек наблюдае1 их объектов на ра.зных стереокадрах ClJ.
Наиболее близким по технической сущности к изобретению является способ автоматического измерения координат точек наблюдаелФях объектов Г2Д, в-котором идентичность двух точек на стереопаре устанавливаиот путем сравнения их яркостей. При этом производят стереосъемку объекта с -помощью двух телекамер, главные оптические оси которых пе рпендикулярны базису и параллельны между собой. Полученные с помощью такой системы два стереокадра ориентированы один относительно другого таким образом, что имеющиеся на каждом из них идентичные точки лежат на одной прямой, параллельной базису съемки. Для установления идентичности точек изображения правого и левого кадров достаточно использовать одну полосу, из каждого кадра. Эти полосы (соответственннне) должны быть ориентированы параллельно базису и расположены на одной координате, отсчитываемой от центра кадра в направлении, перпендикулярном к ним.
Идентификацию осуществляют путем определения разности яркостей двух точек изображения, каждая из которых выбирается с одной из двух соответственных полос. . .
Однако в тех случаях, когда наблюдаемый объект имеет разрывы видимой поверхности или крутые уклоны в направлении наблюдения, видеоинформация, содержащаяся в двух стереокадрах, недостаточна для определения формы и положения объекта, так как при этом на одном кадре стереопары наблюдаются точки, отсутствующие на другом. Видеоинформация,соответствующая таким местам, может быть обработана различными эвристическими методами, но они имеют слабую помехозащищенность и не могут работать в реальных условиях.
Целью изобретения является обеспечение возможности определения коор динат точек наблюдаемых объектов, имеющих в направлении обзора крутые уклоны или разрывы видимой поверхности.
Поставленная цель достигается тем, что по.способу автоматического определения, координат точек наблюдаемых объектов, включающему проведение стереосъемки объекта идентичными проектирующими системами, главные оси которых перпендикулярны базису и параллельны между собой, деление каждого стереокадра на равное число полос, параллельных базису, выборку из каждого стереокадра соответственной полосы, расположенной на одной и той же координате, отсчитываемой от центра кадра в направлении, пер.пендикулярном .полосам, определение среднего абсолютного отклонения яркостей точек, принадлежащих соответственным полосам разных стереокадров, сравнение его с заданным пороговым ототклонением и вычисление координат точек наблюдаемых объектов, стереосъемку объекта осуществляют многостереопарной с общего прямолинейного базиса, объединяют соответственные, полосы стереокадров в одну группу, .располагая их параллельно друг другу., со взаимным ::смещением на расстояния, пропордионёшьные расстояниям между центрами проектирующих систем, формируют число групп полос, равное числу полос в стереокадре, располагая группы так, чтобы полосы всех групп были параллельны, а порядок расположения групп соответ ствовал порядку расположения полос в стереокадре, сканируют полученное вторичное изображение по строкам, направленным п;од различными угламя к полосам, выявляют отрезки строк сканирования, на которых величина среднего абсолютного отклонения яр- . костей, точек не превосходит заданного порогового отклонения, определяют углы наклона этих отрезко.в строк сканирования к полосам и координаты точек пересечения отрезков строк с полосами определенного кадра, а вычисление координат точек
0 наблюдаемых объектов осуществляют по найденным значениям углов и координат точек пересечения.
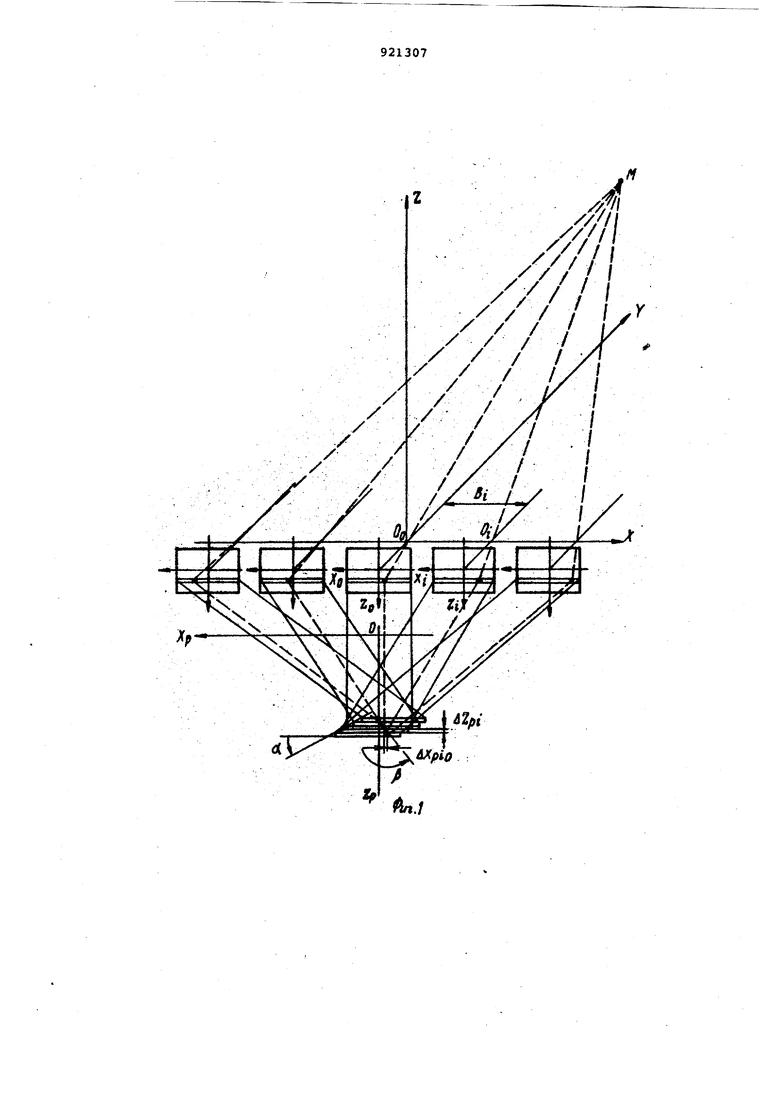
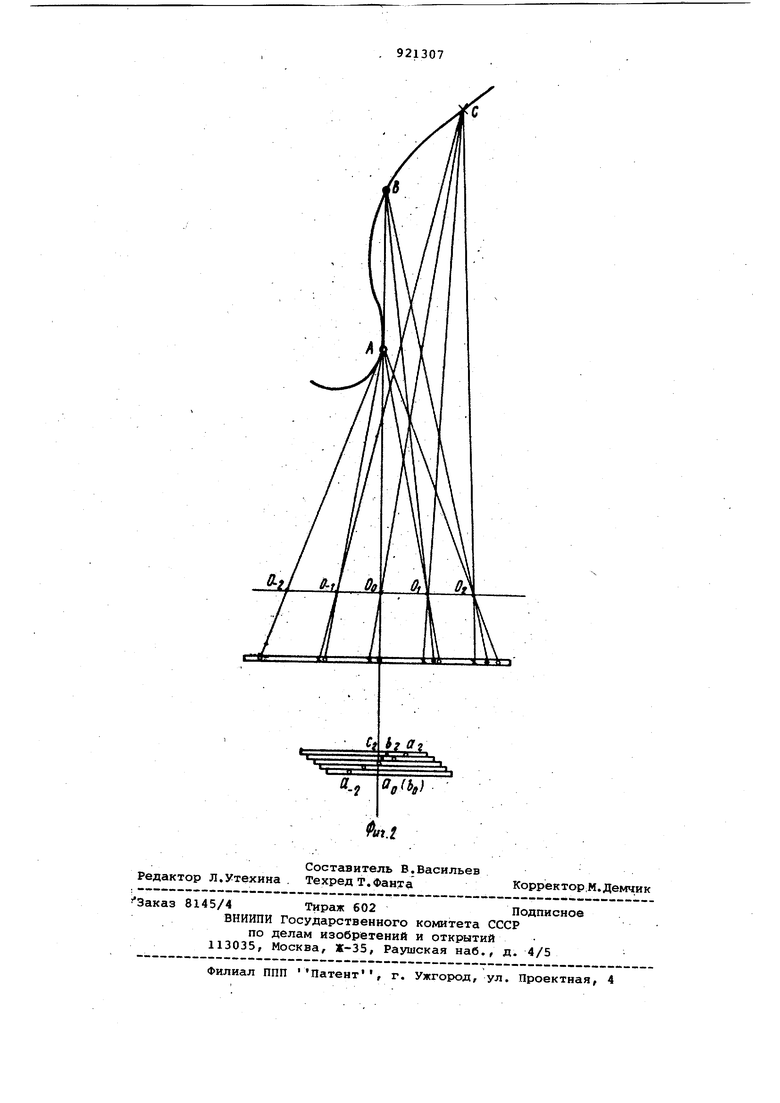
На фиг.1 дана схема построения вторичного изображения для одной группы полос; на фиг.2 - схема отображения точек места разрыва видимой поверхности в точки, расположенные на полосах одной группы вторичного изображения.
Для доказательства указанного выше свойства параллакспанорамограммы и вывода функциональных зависимостей, пространственных координат наблюдаемых точек от расположения отрезков прямых, на которых лежат соответствуиадие точки вторичного изображения, введем три вида систем декартовых координат (см.фиг.1).
1.Пространственная система координат XYZ . Начгшо бе совпадает с одним из проектирующих центров
ось OY - с главной оптической осью этого проектирующего центра, ось . ОХ - с базисной прямой, а направление оси 02. выбирается в соответствии с правой системой координат.
2.Экранные система координат стереокадров первичного изображения Начала их расположены в центрах соответствующих кадров, за которые приняты точки пересечения соответствующих главных осей с плоскостью стереоизображений. Оси О,- X} параллельны базисной прямой, а оси 0{ Z перпендикулярны ей. Направление эти осей соответственно противоположно направлению осей ОХ и 02.
3 Экранная система координат вторичного изображения. ее совпадает с точкой вторичного изображения, соответствующей центру нулевого стереоксщра, у которого проектирующий центр служит началом сиС.теки координат XYZ . Ориентация осе OXpHOZp задается относительно полос соответствующей ориентации осей .
Произвольно расположенная наблю даемая точка М с координатами XVZ проектируется i-м объективом на соответствующий экран в точку т ,. с координатами
- ы ,
Zi , (21
где f - расстояние от оптического
центра до экрана; смещение i-ro объектива по
оси рх от начала координат. На вторичном изображении кгакдая точка т,- отобразится в точку тр. с
координатами
. . - . ..
.Xp. Xj - Л2jCt ot СЗ)
, (4)
где смещение полосы по оси 2р. относительно соответствующей полосы той же группы, выбранной из нулевого стереокадра;
ot- угол заданного направлеиия относительного смещения полос одной группы; К - коэффициент изменения координат 2- .
Из условия расположения полос одной группы следует
Д2. . ,
«)
где - масштабный коэффициент/ Значения коэффициентов k2 и К
определяются из условия отсутствия .взаимного перекрытия полос шириной сЛна вторичном изображении:
(М .
й ЛЪ
мин
Л п ..
(щ::: )
Ч
10
Авд, взаимное расстояние
. ближайших проектирующих . центров; взаимное расстояние
между крайними проектиру ющими. центрами; N - число полос, на которое разбивается каждый стереокадр;
п - число полос, выбираемых из кг1ждого стереокадра для построения вторич-ного изображения.
мещение изображения точки ш оттельно точки «Пр по направлению ОХо
, . X4-X|j44Z. ctj-oi. (8)
о
30
Из фотограмметрии для используемой схемы проекций известно, что
С9)
После подстановки формул (5), и 1(8) и полученного результата в формуле (9) можно найти
ДХ,
40
о .
+ ct(j-ot (-fO)
А2
Учитывая, что и что отношение ЛХр. /лр- .является котан р , : генсом угла |Ь наклона прямой, проходящей через точки тр и глр. , о
получим
. (я;.
50
Так как правая часть этой формулы остается постоянной при переходе от одной точки изображения к другой точке, . не изменяется с изменением.индекса i , то этим доказывается, что все точки гпр лежат на одной прямой с углом наклона (Ь, Следовательно, координата дальнос 0 ти определяется по.известному углу наклона прямой, на которой расположены соответствующие точки
(12)
г
Kg(ct od-ct p) остальные координаты определяются, например, по координатам изо ражения точки М ма полосе, выбранной из нулевого стереокадра ( ) , определение степени однотониости .точек изображения на отрезке прямой производят, сравнивая среднее абсолютное отклонение яркости точек С заданным пороговым отклонением . P f| {VVKe ( где S - яркость i-и точки; 5рр- средняя яркость п точек. Для однозначного определения отре зка проверяется отклонение его средней яркости от средней яркости S-i-p параллельного отрезка соседней строки . |s;., ин/ где i Л - заданное порогсдаое отклонение. Для двух точек изображения средi няя яркость будет S;.() : (п) : и среднее абсолютное оггклонение )hK-i(5;4) т.е. в этом случа е сводится к абсо потному значению plisности. яркос тей, что и используется в способе, принятом за прототип. Таким образом, по способу автоматического измерения координат точек наблюдаемых объектов производят многостереопарную съемку объе та с общего прямолинейного базиса. При этом все проектирующие систеюл должны быть одинаковы, а их главные ори перпендикулярны бдзису съемки и параллельны между собой. Раэбквают каждый стереокадр на равное) ксгличество полос,. Параллельных баг зису . Из кгикдого стереокадра по одной полосе, расположенной на одной и той же координате, отсчитываемой от центра кад ра в направ:пеиии, перпендикулярном полосам и одинаковом для 1&сех каяров. Выбранные таким образом полосы объединяют 8 одну группу, располагая их параллельно друг другу q относительным смещением полос в . заданном направлении на расстЬяняя пропорциональные расстояниям между центрами тех проектирующих систем, с помощью которых были получены содержащие эти полосы стереокадры. Число таких групп должно соответствовать числу полос в одном стереокадре. Из них.составляют вторичное изображение, располагая в нем груп-пы полос так, чтобы их полосы были параллельны, а порядок расположения групп соответствовал- порядку расположения полос, выбранных из одного стереокадра, внутри этого кадра. Затем сканируют это изображение по строкам, направленным под различными углами к полосам. Определяют среднее абсолютное отклонение яркостей на отрезках строк сканирования, .пересекгиощих полосы одной группы. Для тех отрезков, в которых указанные отклонения не превосходят заданного порогового значения, находят углы их наклона и координаты одной из этих точек, например точки пересечения с полосой, выбранной из стереокадра с нулевым номером, и используют найденные значения для определения пространственных коорди нат наблюда емых точек по формулам (12, 13, 14). Эффективность- способа проявляется в случаях съемки физических тел с разгялзом видимой поверхности, или на участках с крутыми уклонами в направлении съемки. Следует .отме-. тить, что именно эти места видимых поверхностей важны для последующего анализа, позволяквдего определить форму и положение снимаемых объектов. Кроме.того, из-зе1 наличия шумов при считывании видеосигналов равенство яркостей можно определить только с некоторой погрешностью, что приводит к размыванию границ наблюдаемых поверхностей и возможности появления ложно идентифицированных точек изображений, т.е. таких точек изображений, которые соответствуют двум различным точкам объекта, имеющим приблизительно одинаковые яркости. Благодаря многостереопарной съемке вероятность ложных идентификаций резко снижается и детальнее выявляются резервы и края видимых поверхностей. На фиг.2, пЬказана схема проектирующих лупей, проходя1дих через центры , случая съемки некоторой поверхности с участком видимого разрыва, на котором ука- заны характерные точки /А, в и С , которым соответствуют Hia полосах вторичного изображения точки («12 -f 2 (Ър,Ъ, ,) и (Cj,., Со , С:, , t ) . Из чертежа видно, что по способу,принятому за прототип « в котором используется только..два стереокадра и, следовательно, две соответственных крайних
полосы показанной группы, можно оп.ределить только координаты точки А и точекj лежамих правее С и левее А, но .невозможно определить координаты точек на участке ВС, так/ как их изображений нет на левом стереокадре. Следовательно,, наибольший уклон видимой поверхности относительно плоскости стереокгшров, который при этом может быть найден/ , определяется углом . Более крутые уклоны и размял видимой, поаерхности невозможно различить, . пользуясь известными способами. Применение способа позволяет выявить подробнее дётгши поверхности:, ве- личину yKjfoHa или глубину разЕяюа. I Соответствующие хочкгш А., В и. С изо&ражения (а-.. ,а.-,, а., в..,, а), . ,
V 2
на отрезках прямых с paзличны aI углаМи наклона. Отрезки Ъ{,-Ъ2Я
,Е.- с пересекаются с отрезком
ц.,- «2 скачкообразное ;
- нение наклонов соседних отрезков, которое и показывает разрыв вида- ,
мой поверхности, певчем по величине изменения наклона можно опреде-лить глубичу разрыва. В случае Крутого уклона наб.пюдаемой поверхИосi ти на вторичном изображении наблкщаг. ется веер ; наклонных полос, образуемых изображениями снятых точек.
По углам расходимости веера можно судить о степени уклоиа.
Таким образом, при исследовании объектов предлагаемый способ позволет автоматически детгшьно исследовать поверхности физических тел, в том числе в местах разрыва Или крутых уклонов видимой поверхности и уменьшить эффект Vразмазываниякраев наб.пюдаемых поверхностей и вероятность ложных идентификаций наблюдаемых точек. .
Способ может быть сравнительно просто реализован с помощью известных, технических средств. Например, для получения вторичного изображения могут быть использованы волоконно-оптические элементы. Плоские ленты из таких элементов; должны быт расположены так, чтобы их начальные торцовые части находились в экран-, ной плоскости стереокадров, на месте выбираекЕях строк/ а концевые части были собраны в обций коллектор в соответствии с предлагаеьшм способом.
Способ может быть использован в скстемах технического .зреиия роботов и подвижных аппаратов. Он может
быть также применен при анализе ;стереоизобр икеиий, полученных при
съемке с космических аппаратов.
СПОСОБ АВТОМАТИЧЕСКОГО СЯ1РЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК НАБЛЮДАЕМЫХ ОБЪЕКТОВ, включахж ий проведение стереосъемки объекта идентичными системами, главные оси которых перпендикулярны базису и параллельны Собой, деление каждого сте+ реокадра на равное число полос, параллельных базису, выборку из каждого стереокёщра соответственной полог; сы, расположенной на одной и той же координате, отсчитываемой от центра кадра в направлении, перпендикулярном полосам, определение среднего абсолютного отклонения яркостей точек, принадлежащих соответственньм :полосам разных стереокадров, срав.нение его с заданным пороговым отклонением и вычисление координат точек наблюдаемых объектов, о т л ичающийся тем, что, с целью обеспечения возможности определения формы и положения объектов, име{ощих в направлении наблюдения кру.тые уклоны или разрывы видимой по- , ; верхности, стереосъемку объекта .осуществляют многостереопарной с |общего прямолинейного базиса-, объединяют соответственные полосы стереокадров в одну группу, располагая их параллельно друг другу со взаимным смещением на расстоянияj пропорциональные расстояниям между центрами проектирующих систем, формируют число групп полос,, равное числу полос в стереокадре, распог лагая группы так, чтобы полосы (Л всех групп были параллельны, а поря: док расположения групп соотв1ет/ств.овал порядку расположения полос в стереокадре, сканируют., полученное изображение по строкам, направленным под различными углами к полосам, выявляют отрезки строк сканирования, на которых величина среднего абсолютного отклонения яркостей точек не превосходит заданного порогового отклонения, определяют углы наклона этих, отрезков строк сканирования к полосам и. координаты точек пересечения отрезков строк с. полосами определенного кадра, а вычисление координат точек наблюдаемых объектов осуществляют по найденным значениям углов и координат точек пересечения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гиммельфарб Г.Л | |||
| и др | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| участков на снимках стереопары;.; - Кибернетика, 1972, 2 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Майсов И.А | |||
| Стереотелевизионный спорое исследования пространства.; - | |||
| - .Техника кино и телевидения , 1966, №12 (прототип). | |||
