(5) СПОСОБ КОНПЕНСАЦИИ ИНДУКЦИОННОЙ НАВОДКИ В ГАЛЬВАНОМАГНИТНЫХ ДАТЧИКАХ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения магнитного поля и устройство для его осуществления /его варианты/ | 1980 |
|
SU958991A1 |
| Способ компенсации индуктивной намотки в цепях датчика холла | 1977 |
|
SU700847A1 |
| Магнитометр | 1980 |
|
SU918908A1 |
| Устройство для измерения амплитуды импульсного магнитного поля и способ,его реализующий | 1980 |
|
SU918907A1 |
| Гальваномагнитный датчик | 1981 |
|
SU983606A1 |
| Способ термостабилизации гальваномагнитных датчиков | 1978 |
|
SU871106A1 |
| Измеритель электродвижушейся силы холла | 1980 |
|
SU883817A1 |
| Устройство для измерения постоянного магнитного поля | 1980 |
|
SU892383A1 |
| Способ измерения напряженности магнитного поля | 1978 |
|
SU789952A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО ПОЛЯ | 1990 |
|
RU2033624C1 |

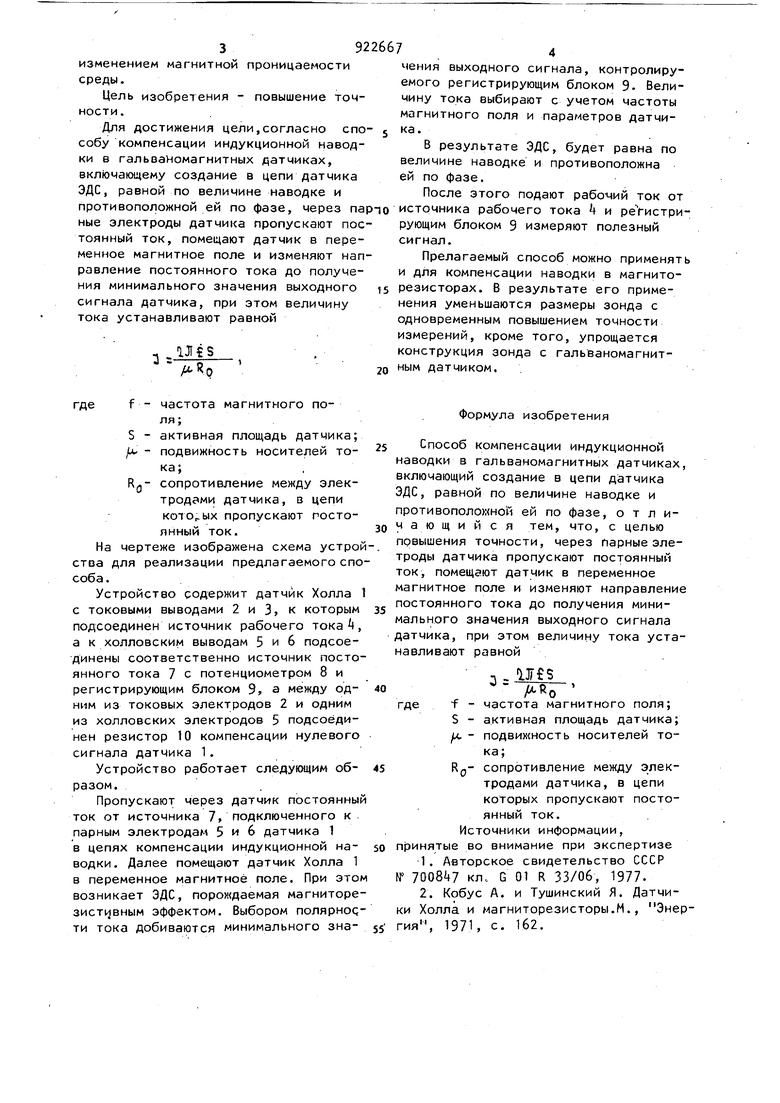
Изобретение относится к приборостроению и автоматике, и может быть использовано в устройствах с гальван магнитными датчиками. Известен способ компенсации индук ционной наводки в целях датчика Холла, основанный на изменении потокосцепления датчика с магнитным полем и регистрации наеодок в его цепях пу тем введения в окружающую среду ферромагнитного тела, например ферритового стержня, и изменении его местоположения относительно магнитной оси датчика до достижения минимального значения регистрируемой наводки ГП. Недостатком известного способа является то, что размещение вблизи датчика ферромагнитного тела увеличивает размеры зонда, а это лишает датчик одного из его главных достоинств - миниатюрных размеров. Кроме того, компенсация наводки невозможна вблизи ферромагнитных тел и масс, так как они вносят дополнительное перераспределение потокосцепления датчика, не поддающееся контролю. Известен также способ компенсации индукционной наводки в гальваномэ - нитных датчиках, включающий создание в цепи датчика ЭДС, равной по величине наводке и противоположной ей по фазе 2. В известном способе вокруг или вблизи датчика располагают дополнительные компенсационные контуры, таким образом, чтобы в цепь датчика Холла ввести напряжение, пропорциональное ЭДС индукционной наводки. Недостатком известного способа является то, что наличие вокруг датчика дополнительных контуров, в которых индуцируется п рот и воэдс наводки, усложняет конструкцию зонда, а это особенно нежелательно при массовом производстве устройств с гальваномагнитными датчиками, кроме того, компенсация наводки невозможна вблизи ферромагнитных тел, что связано с 392 изменением магнитной проницаемости среды. Цель изобре1ения - повышение точности. Для достижения цели,согласно спо собу компенсации индукционной наводки в гальваномагнитных датчиках, включающему создание в цепи датчика ЭДС, равной по величине наводке и противоположной ей по фазе, через па ные электроды датчика пропускают пос тоянный ток, помещают датчик в переменное магнитное поле и изменяют нап равление постоянного тока до получения минимального значения выходного сигнала датчика, при этом величину тока устанавливают равной - .jjiL где f - частота магнитного поля ; S - активная площадь датчика; /х- - подвижность носителей тока;Rjj- сопротивление между электродами датчика, в цепи которых пропускают постоянный ток. На чертеже изображена схема устрой ства для реализации предлагаемого спо соба. Устройство содержит датчик Холла с токовыми выводами 2 и 3, к которым подсоединен источник рабочего тока 4, а к холловским выводам 5 и 6 подсоединены соответственно источник постоянного тока 7 с потенциометром 8 и регистрирующим блоком 9, а между одним из токовых электродов 2 и одним из холловских электродов 5 подсоединен резистор 10 компенсации нулевого сигнала датчика 1. Устройство работает следующим образом. Пропускают через датчик постоянный ток от источника 7, подключенного к парным электродам 5 и 6 датчика 1 в цепях компенсации индукционной наводки. Далее помещают датчик Холла 1 в переменное магнитное поле. При это возникает ЭДС, порождаемая магниторе зиcт звным эффектом. Выбором полярнос; ти тока добиваются минимального значения выходного сигнала, контролируемого регистрирующим блоком 9. Величину тока выбирают с учетом частоты магнитного поля и параметров датчика. В результате ЗДС, будет равна по величине наводке и противоположна ей по фазе. После этого подают рабочий ток от источника рабочего тока и ре истрирующим блоком 9 измеряют полезный сигнал. Прелагаемый способ можно применять и для компенсации наводки в магниторезисторах. В результате его применения уменьшаются размеры зонда с одновременным повышением точности измерений, кроме того, упрощается конструкция зонда с гальваномагнитным датчиком. . Формула изобретения Способ компенсации индукционной наводки в гальваномагнитных датчиках, включающий создание в цепи датчика ЭДС, равной по величине наводке и противополомной ей по фазе, отличающийся тем, что, с целью повышения точности, через парные элетроды датчика пропускают постоянный ток, помещают датчик в переменное магнитное поле и изменяют направление постоянного тока до получения минимального значения выходного сигнала датчика, при этом величину тока устанавливают равной п . где f - частота магнитного поля; S - активная площадь датчика; /к, - подвихсность носителей тока;R,j- сопротивление между электродами датчика, в цепи которых пропускают постоянный ток. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 700847 кл. G 01 R 33/06, 1977. 2.Кобус А. и Тушинский Я. Датчики Холла и магниторезисторы.М., Энергия, 1971, с. 162.
.
