154) СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ термостабилизации гальваномагнитных датчиков | 1978 |
|
SU871106A1 |
| Способ измерения магнитного поля и устройство для его осуществления /его варианты/ | 1980 |
|
SU958991A1 |
| Способ измерения сильных магнитных полей | 1978 |
|
SU859976A1 |
| Магнитометр | 1980 |
|
SU918908A1 |
| Способ компенсации индукционной наводки в гальваномагнитных датчиках | 1980 |
|
SU922667A1 |
| Контроллер магнитного поля | 2023 |
|
RU2799103C1 |
| Способ измерения напряженности магнитного поля | 1981 |
|
SU983605A1 |
| СПОСОБ УМЕНЬШЕНИЯ ПОГРЕШНОСТЕЙ ХОЛЛОВСКОГО МАГНИТОМЕТРА | 2006 |
|
RU2311655C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ ЭФФЕКТА ХОЛЛА | 2006 |
|
RU2316839C1 |
| Гистериограф | 1978 |
|
SU1320782A1 |
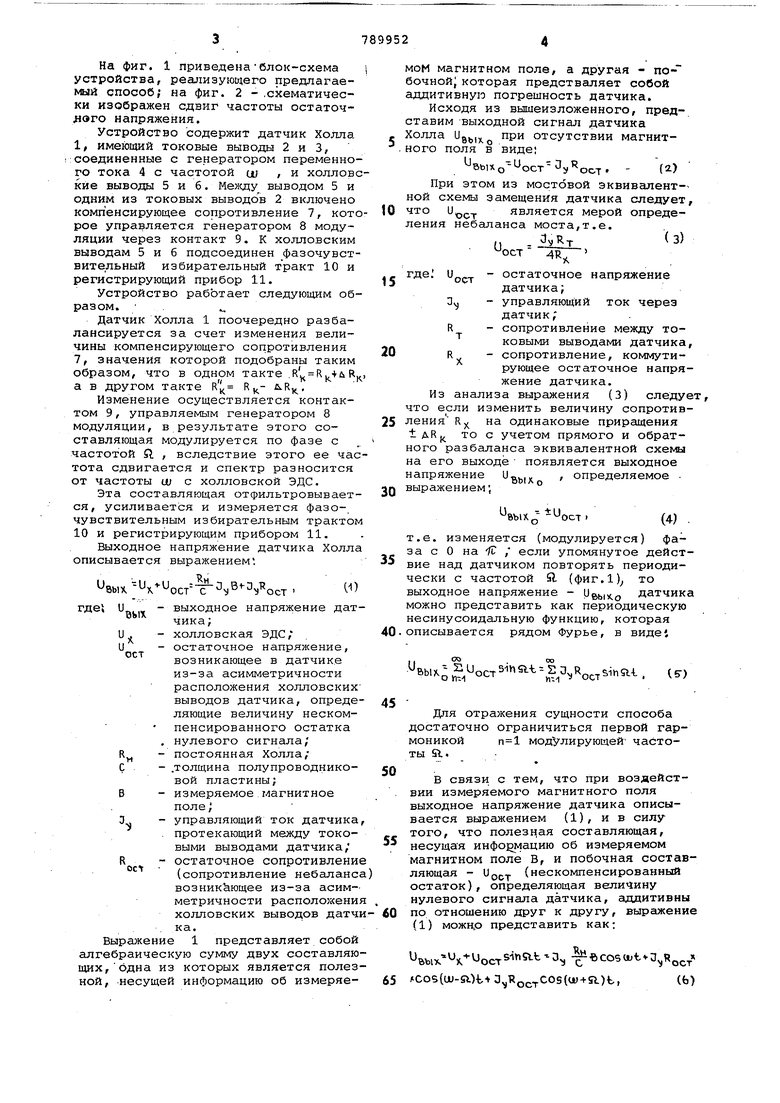
Изобретение относится к магнитоиэ мерительным устройствам, использующи в качестве первичного преобразовател гальваномагнитные датчики. Известен способ измерения магнитного поля магниторезистивным датчиком с дополнительными электродами, шунтирующими поле Холла, в котором дополнительные электроды попеременно подключаются к различньнл нагрузкам, а величину магнитного поля определяю по амплитуде огибающей падения напря жения на токовых электродах датчика 1. . Недостатком известного способа является то, что при воздействии магнитного поля сопротивление магниторезистивного датчика зависит от величины электрического поля Холла, которое для получения значительного изменения, кратности магнитосопротивления необходимо полностью шунтировать, в известном Ле способе использую именно зависимость эффекта магнитЬсопротивления от электрического поля Ко ла, что существенно снижает точност и чувствительность измерений. Известен другой способ измерения напряженности магнитного поля, в котором воздействуют на остаточное напряжение магниточувствительного четырехполюсника до получения нулевого коэффициента передачи в одном направлении и измеряют коэффициент передачи в другом направлении, по которому судят о величине напряженности t2. Недостатком известного способа является температурный и временной дрейф остаточного напряжения, что снижает точность и чувствительность измерения. Цель изобретения - повышение точности измерений. Для достижения указанной цели в известном способе измерения напряженности магнитного поля, включающем воздействие на остаточное напряжение гальваномагнитного датчика, сдвигают частоту остаточного напряжения путем его фазовой модуляции с частотой, отличной от частоты управляющего тока:, а величину напряженности определяют по составлякидей вцходного сигнала с частотой управляющего тока. Кроме того, фазовую модуляцию остаточного напряжения осуществляют изменением величины компенсирующего его сопротивления. На фиг. 1 приведенаблок-схема устройства, реализующего предлагаемый способ; на фиг. 2 - .схематически изображен сдвиг частоты остаточлого напряжения. Устройство содержит датчик Холла 1, имеющий токовые выводы 2 и 3, :соединенные с генератором переменного тока 4 с частотой ш , и холловс кие выводы 5 и 6. Меяуцу выводом 5 и одним из токовых выводов 2 включено компенсирующее сопротивление 7, кото рое управляется генератором 8 модуляции через контакт 9. К холловским выводам 5 и б подсоединен фазочувствительный избирательный тракт 10 и регистрирующий прибор 11. Устройство работает следующим образом. Датчик Холла 1 поочередно разбалансируется за счет изменения величины компенсирующего сопротивления 7, значения которой подобраны таким образом, что в одном такте .к , R а в другом такте RJ R u.R, Изменение осуществляется контактом 9, управляемым генератором 8 модуляции, в результате этого составляющая модулируется по фазе с частотой И. , вследствие этого ее час тота сдвигается и спектр разносится от частоты ш с холловской ЭДС. Эта составляющая отфильтровывается, усиливается и измеряется фазочувствительным избирательным трактом 10 и регистрирующим прибором 11. Выходное напряжение датчика Холла описывается выражением . UBWX-UX-U -о,во,к где , -выходное напряжение дат чика; -холловская ЭДС/ -остаточное напряжение, возникающее в датчике из-за асимметричности расположения холловских выводов датчика, опреде ляющие величину нескомпенсированного остатка . нулевого сигнала; -постоянная Холла; -.толщина полупроводниковой пластины; -измеряемое магнитное поле; -управляющий ток датчика . протекающий между токовыми выводами датчика; -остаточное сопротивлени (сопротивление небаланс возникйющее из-за асимметричности расположени холловских выводов датч ка. Выражение 1 представляет собой алгебраическую сумму двух составляю щих, одна из которых является полез ной, -несущей информацию об измеряеоМ магнитном поле, а другая - по- очной| которая предстваляет собой ддитивную погрешность датчика. Исходя из вышеизложенного, предтавим ВЫХОДНОЙ сигнал датчика олла Ugj,, при отсутствии магнитого поля в виде; J biXo-UocT- s oc.. - (2.) При этом из мостовой эквивалент-ной схемы замещения датчика следует, что и является мерой опредеения небаланса моста,т.е. . з) где: и - остаточное напряжение датчика; Зч) - управляющий ток через датчик; R - сопротивление между токовыми выводами датчика, R - сопротивление, коммутирующее остаточное напряжение датчика. Из анализа выражения (3) следует, то если изменить величину сопротивения Rj на одинаковые приращения IAR то с учетом прямого и обратного разбаланса эквивалентной схемы на его выходе появляется выходное напряжение U определяемое выражением; ост. (4) , т.е. изменяется (модулируется) фаза с О на. fC , если упомянутое действие над датчиком повторять периодически с частотой SI (фиг.1) то выходное напряжение - Датчика можно представить как периодическую несинусоидальную функцию, которая описывается рядом Фурье, в виде ,UocTS-i S t--| a.,R sihSli . () Для отражения сущности способа достаточно ограничиться первой гармоникой п 1 модулирующей частоты SL. в связи с тем, что при воздействии измеряемого магнитного поля выходное напряжение датчика описывается выражением (1), и в силу того, что полезная составляющая, несущая информацию об измеряемом магнитном поле В, и побочная составляющая - UQP {нескомпенсированный остаток), определяющая величину нулевого сигнала датчика, аддитивны по отношению друг к другу, выражение (1) можно представить как; ubix)ocTsi 5 -t -3., «cosu tvU R v fCos(u)-si),cos()t, (fe)
где: 3 - управляющий ток через
датчик В - измеряемое магнитное поле,
постоянная Холла; толщина полупроводниковой пластины датчика;
U/ г частота управляющего тока;
сопротивление небаланса ост
датчика, возникающее изза асимметричности датчи: ка;
и - частота модуляции остаточного напряжения.
. Из выражения (6), следует, что полезная составляющая U выходного напряжения датчика, несущая информацию об измеряемом магнитном поле, имеет частоту, отличную от частоты ьст определяющей нулевой сигнал датчика, вследствие чего не представляет собой трудности вьщелить полез,ную составляющую, например, при помощи избирательного усилителя, настроенного на частоту (и .
изобретения
Формула
Источники информации, принятые во внимание при экспертизе
0 № 337741, кл. G 01 R 33/02.
Фие.1
у«
Ноеп
кт.
О Я iJ-Jibi Фи1.1
