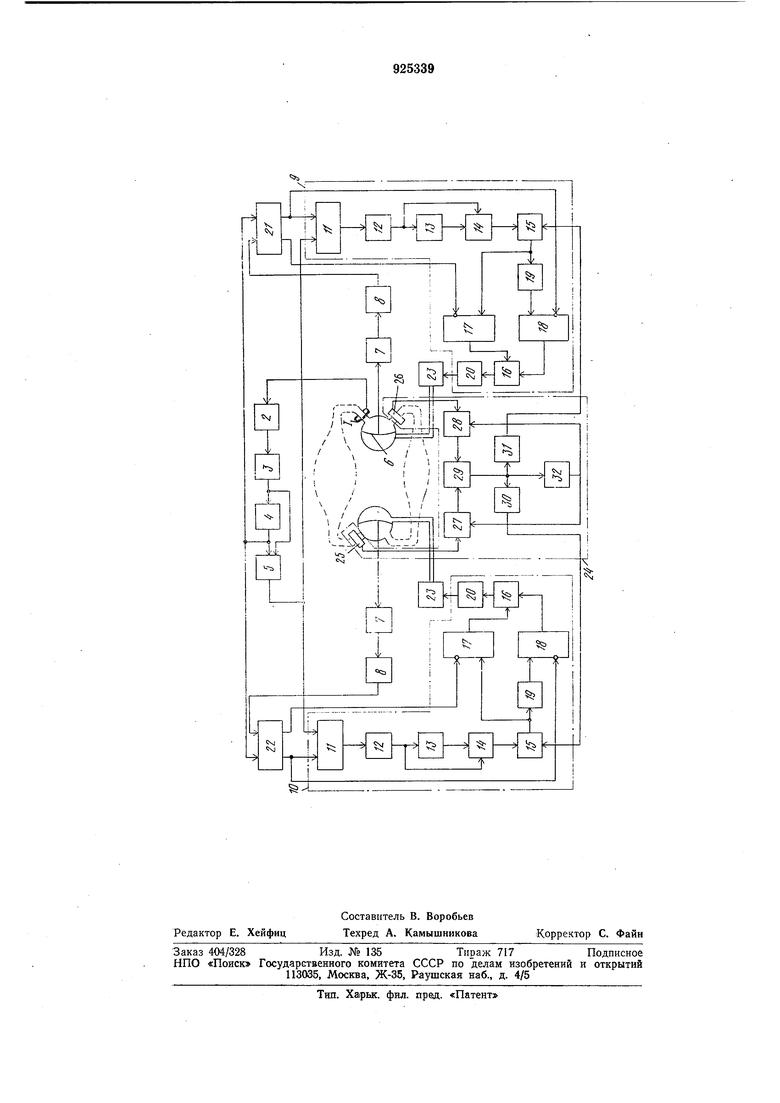
них производительностей, датчики 25 и 26 объемного расхода жидкости, интеграторы 27 и 28, сумматор .29, формирователи 30 и 3.1 сигналов, нуль-орган 32.
Устройство работает следующим образом.
Сигнал с датчика 1 растяжения аорты усиливается и вводится в функциональный преобразователь 3, где вычисляется по заданному алгоритму Ч1астота сокращений искусственного сердца. Выходное напряжение поступает на преобразователь 4 напряжение-частота, который формирует периодическую послеаовательность импульсов, частота , которых пропорциональна частоте пульса. Этими импульсами запусюаTOTQ триггеры 21, 22 управления левого и правого искусственных желуаочков. Таким образом определяется начало фазы нагнетания. Сигнал датчика б ударного объема постуолет на усилитель 7 и далее на триггер 8 Шмидта, срабатывающий при напряжении, соответствующем заданному уровню конечносистолического объема. Сигнал с триггера 8 Шмидта определяет начало фазы всасыв ания. Заданная длительность фазы нагнетания формируется задапчиком 5 длительности нагнетания, на вход которого подаются запуокающ,ие импульсы с преобразователя 4 напряжение - частота и управляющее напряжение с функционального преобразователя 3. Сигнал с задатчика 5 длительности ф-азы нагнетания поступает на вход нуль-органа 11, на другой вход которого подается сигнал триггера 21 управления, соответствующий длительности фазы нагнетания. Импульсный сигнал рассогласования с нульоргана 11 поступает на вход преобразователя 12 время - напряжение, который вырабатывает постоянное напряжение, пропорциональное сигналу рассогласов1ания. Далее сигнал поступает на генератор 13 частоты и сумматоры 14, 15, а затем модулируется и после сумматора 16 и усреднителя 20 подается на исполнительный механизм 23. Длительность фазы нагнетания определяется сигналом триггера 21 управления, подаваемым на импульсный вход модулятора 17, а фазы всасывания - сигналом, снимаемым с другого плеча триггера 21 управ.пения и подаваемым на импульсный вход модулятора 18.
Сигналы с датчиков 25 и 26 объемного расхода жидкости правого и левого искусственных желудочков интегрируются интеграторами 27, 28 и сравниваются на сумматоре 29. Полученный Т1аким образом сигнал, пропорциональный разности объемов жидкости, перекачанных желудочками, поступает на формирователи 30, 31 сигналов. При нулевом сигнале разности объемов нуль-орган 32 вырабатывает сигнал, сбрасывающий показания интеграторов 27, 28. Таким образом, блок выравнивания 24 вырабатывает два сигнала, зависящих от разности объемов жидкости, перекачанной правым и левым искусственными желудочками. Эти сигналы подаются на сумматоры 15, подключенные в регуляторы 9 и 10 давления нагнетания и всасывания, и изменяют давления нагнетания и всасывания таким образом, что происходит выравнивание перекачанных желудочками объемов жидкости, а следовательно, и средних производительностей желудочков.
Использование изобретения позволит увеличить степень адекватности функционирования искусственного сердца естественному путем выравнивания средних производительностей левого и правого искусственных желудочков.
Формула изобретения
Устройство для управления искусственным сердцем по авт. св. № 519193, отличающееся тем, ЧТО, с целью уменьщения времени переходного процесса при
выравнивании производительностей искусственных желудочков сердца, оно дополнительно снабжено двумя датчиками объемного расхода жидкости, двумя интеграторами со сбросом, сумматором, двумя формирователями сигналов и нуль-органом, причем выход первого датчика объемного расхода жидкости соединен через первый интегратор с инвертирующим входом сумматора, выход второго датчика объемного
расхода жидкости соединен через второй интегратор с неинвертирующим входом сумм)атора, выход которого подсоединен к входам первого и второго формиров-ателей, выход сумматора через нуль-орган соедииен с сбрасывающими входами первого и второго интеграторов.
Источник информации, принятый во внимание при экспертизе: 1. Авторакое свидетельство СССР № 519193, кл. А 61 F 1/22, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления искусственным сердцем | 1973 |
|
SU519193A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯИСКУССТВЕННЫМ СЕРДЦЕМ В ЭКСПЕРИМЕНТЕНА ЖИВОТНЫХ | 1971 |
|
SU434941A1 |
| Устройство для управления искусственным сердцем | 1986 |
|
SU1477418A1 |
| Устройство управления искусственным сердцем | 1982 |
|
SU1194424A1 |
| Искусственное сердце | 1986 |
|
SU1450828A1 |
| Устройство для нагнетания крови | 1982 |
|
SU1107872A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УДАРНЫМ ВЫБРОСОМ КРОВИ ПРОТЕЗА ЖЕЛУДОЧКА СЕРДЦА | 1972 |
|
SU328642A1 |
| Аппарат вспомогательного кровообращения | 1985 |
|
SU1323110A1 |
| Устройство для определения динамики ударного объема сердца | 1981 |
|
SU1024065A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ВЕЩЕСТВ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2169906C2 |