Изобретение относится к измерител ной технике и может быть применено в прокатном производстве, а также в станкостроении и других областях техники, где производится контроль неплоскостности поверхности. Известны телевизионные автоматы для контроля геометрических параметров движущихся объектов, содержащие оптическую систему и преобразователь свет-сигнал l. Недостатком устройств такого рода является использование автоматических систем. Наиболее близким к изобретению по технической сущности и достигаемо му результату является устройство для контроля формы движущегося материала, содержащее источник излучения приемник излучения, схему детектирования и регистрирующий прибор. В известном устройстве приемник излучения предназначен для определения степени перемещения, сформированной на контролируемом объекте световой полосы в трех точках и содержит оптическую систему, передающую и приемную трубки, три позиционно-чувствительных фотоприемника. Скема детектирования в известном устройстве содержит три интегратора и два сумматора L2 J. Недостатками известного устройства являются недостаточно высокие точность измерений и надежность конструкции , обусловленные большим количеством преобразователей. Цель изобретения - повышение точности измерения и надежности конструкции . Эта цель достигается тем, что в устройстве для контроля формы движущегося материала, содержащем источник излучения, приемник излучения, схему детектирования и регистрирующий прибор, приемник излучения выполнен в виде трех световодов, сканистора, генератора пилообразного напряжения
и дифференцирующего усилителя, а схема детектирования выполнена в виде последовательно соединенных сумматора импульсов по длительности и интегратора, световоды подключены к входу сканистора, .выход которого через последовательно соединенные дифференцирующий усилитель, сумматор импульсов по длительности и интегратор связан с регистрирующим прибором,а генератор пилообразного напряжения подключен к входу опорного напряжения сканистора.
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 временная диаграмма сигналов на детектирующего устройства.
Устройство содержит Источник V иЗ,лучения, проецирующую рптическую сие тему 2, три световода , выходные торцы которых оптически связаны с поверхностью сканистора 6, выход которого через последовательно соединенные дифференцирующий усилитель 7, сумматор 8 импульсов по длительности и интегратор 9 подключен к регистрирующему прибору 10. Световоды 3 и 5, сканистор 6, дифференцирующий усилитель 7.вместе с генератором пилообразного напряжения (не показанj, подключенный к входу опорного напряжения сканистора 6 образуют приемник излучения, а последовательно соединенные сумматор 8 импульсов по дли.тел1 ности и интегратор 9 образуют схему детектирования.
Устройство работает следующим образом.
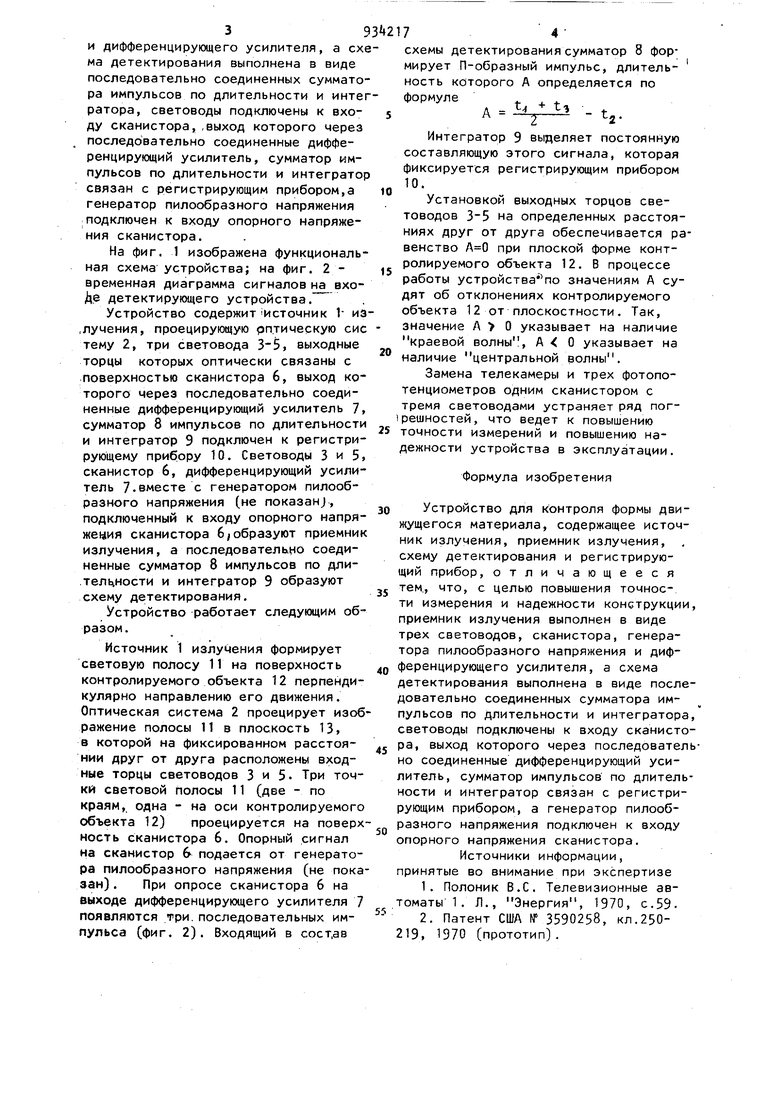
Источник 1 излучения формирует световую полосу 11 на поверхность контролируемого объекта 12 перпендикулярно направлению его движения. Оптическая система 2 проецирует изображение полосы 11 в плоскость 13 в которой на фиксированном расстоянии друг от друга расположены входные торцы световодов 3 и 5. Три точки световой полосы 11 (две - по краям, одна - на оси контролируемого объекта 12) проецируется на поверхность сканистора 6. Опорный сигнал на сканистор 6 подается от генератора пилообразного напряжения (не показан) . При опросе сканистора 6 на выходе дифференцирующего усилителя 7 появляются три. последовательных импульса (фиг. 2). Входящий в сост,ав
схемы детектирования сумматор 8 формирует П-образный импульс, длительность которого А определяется по формуле
-t + t3 А -% - t.
- .2Интегратор 9 выделяет постоянную составляющую этого сигнала, которая фиксируется регистрирующим прибором 10.
Установкой выходных торцов световодов 3-5 на определенных расстояниях друг от друга обеспечивается равенство при плоской форме контролируемого объекта 12. В процессе работы устройства по значениям А судят об отклонениях контролируемого объекта 12 от плоскостности. Так, значение А О указывает на наличие краевой волны, А О указывает на
наличие центральной волны.
Замена телекамеры и трех фотопотенциометров одним сканистором с тремя световодами устраняет ряд погрешностей, что ведет к повышению
5 точности измерений и повышению надежности устройства в эксплуатации.
Формула изобретения
0 Устройство для контроля формы движущегося материала, содержащее источник излучения, приемник излучения, схему детектирования и регистрирующий прибор,отличающееся
J тем., что, с целью повышения точности измерения и надежности конструкции, приемник излучения выполнен в виде трех световодов, сканистора, генератора пилообразного напряжения и дифQ ференцирующего усилителя, а схема
детектирования выполнена в виде последовательно соединенных сумматора импульсов по Длительности и интегратора, световоды подключены к входу сканистоj pa, выход которого через последовательно соединенные дифференцирующий усилитель, сумматор импульсов по длительности и интегратор связан с регистрирующим прибором, а генератор пилообразного напряжения подключен к входу опорного напряжения сканистора.
Источники информации, принятые во внимание при экспертизе
1.Полоник B.C. Телевизионные автоматы 1. Л., Энергия, 1970, с.59.
2.Патент США № 3590258, кл.250219, 1970 (прототип). /J
Фиг. f J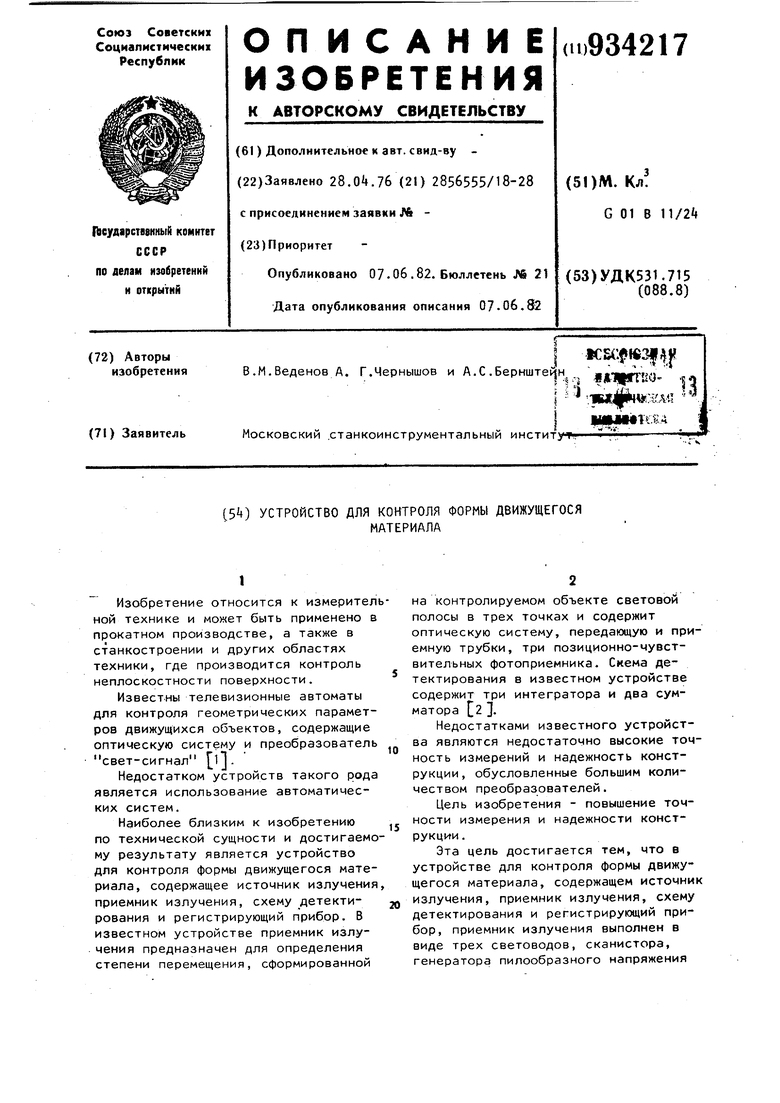
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров движущейся магнитной ленты | 1976 |
|
SU590821A1 |
| Устройство для измерения координаты оптического пучка | 1979 |
|
SU781561A1 |
| Устройство для контроля плотности полотна | 1981 |
|
SU964036A1 |
| Устройство контроля поперечного размера протяженного объекта | 1985 |
|
SU1262283A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ СВЕТА Б ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1972 |
|
SU434617A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
| Виброметр | 1982 |
|
SU1087778A1 |
| Устройство для определения уработки нитей основы и плотности ткани по утку | 1985 |
|
SU1313918A1 |
| Устройство для контроля работоспособности приемника цифровой информации | 1987 |
|
SU1494236A1 |
| Способ определения шероховатости поверхности поступательно движущегося цилиндрического объекта | 1981 |
|
SU1156102A1 |
Фаг. I
