1
Изобретение относится к грузоподъемным механизмам, в частности к приводам строительных подъемников, преимущественно реечных.
Известно приводное устройство грузоподъемного механизма, преимущественно реечного подъемника, содержащее электродвигатель, тормоз, планетарный редуктор, соединенный с рабочим органом грузоподъемного механизма ij.
Недостатком известного привода является то, что он не обеспечивает необходимого режима разгона и остановки грузонесущего органа. Переход на большие скорости перемещения увеличивает динамические нагрузки на подъемник. Кроме того, известный привод не рассчитан на длительную работу.
Цель изобретения - повышение производительности приводного устройства путем увеличения скорости
подъема, и динамических нагрузок на подъемник за счет уменьшения величины ускорения при его разгоне и останове.
Поставленная цель достигается тем, что приводное устройство снабжено дополнительным электродвигателем и зубчатой передачей, закрепленной на валу дополнительного электродвигателя, а планетарный редуктор снабжен зубчатым венцом, смонтированным на корпусе последнего с наружной стороны и взаимодействуюи1им с шестерней упомянутой зубчатой передачи.
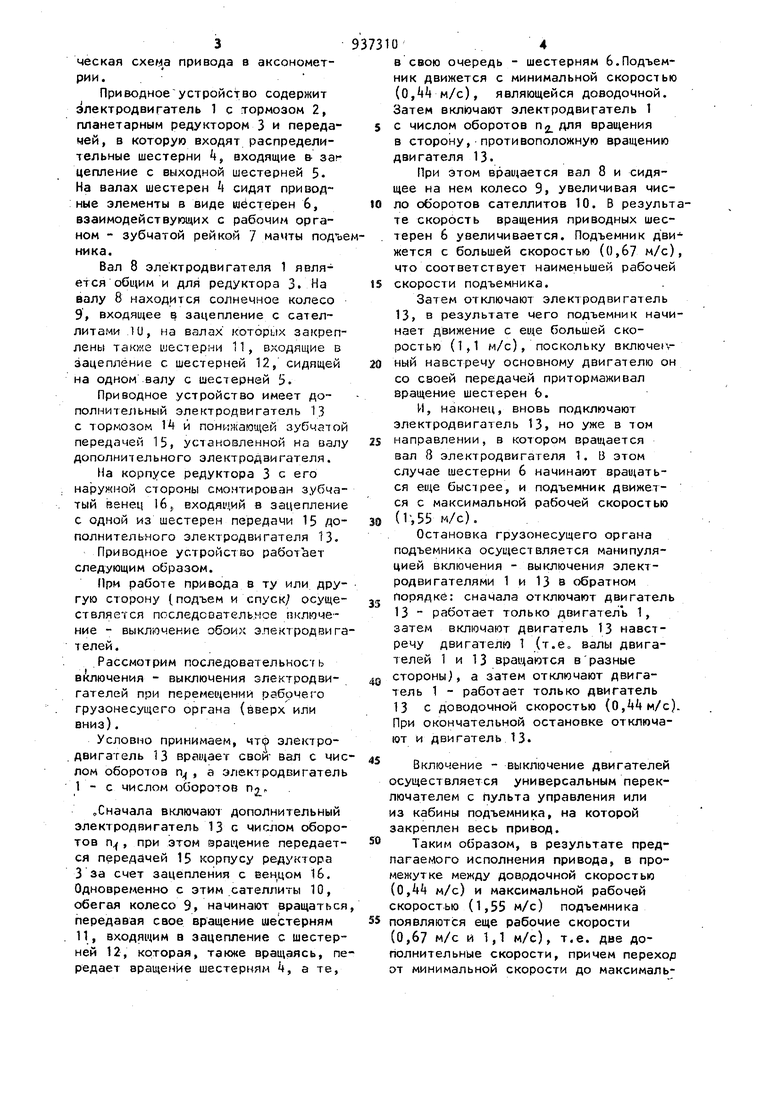
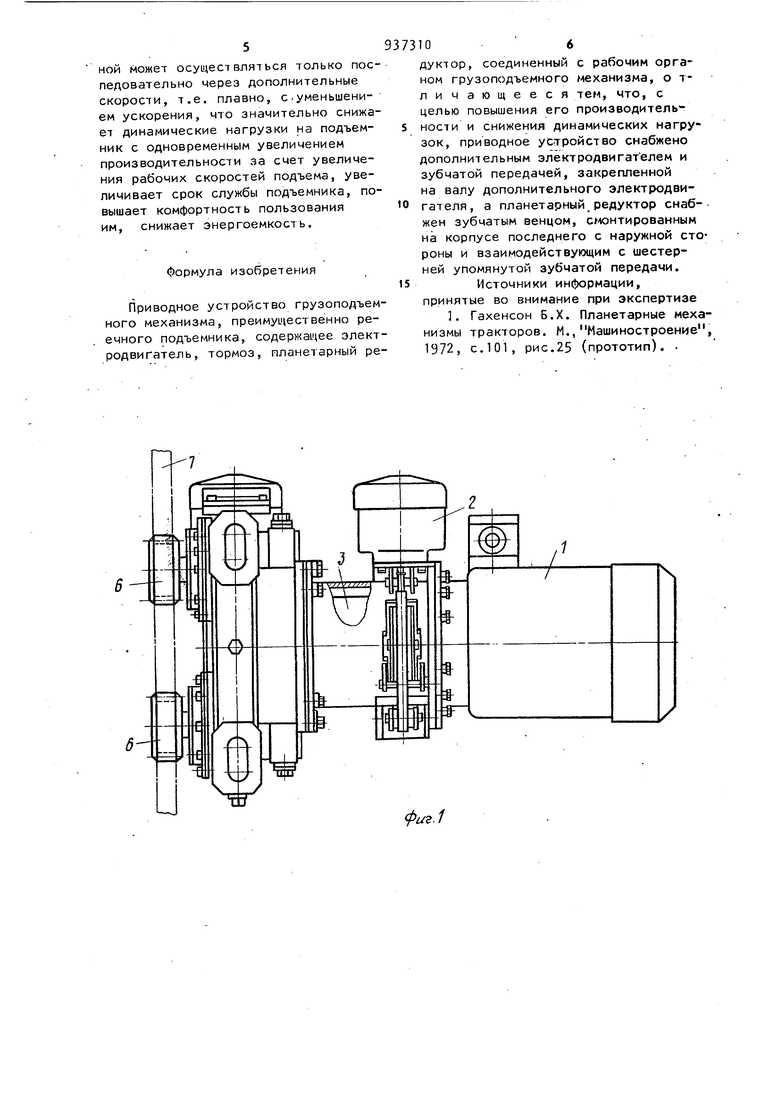
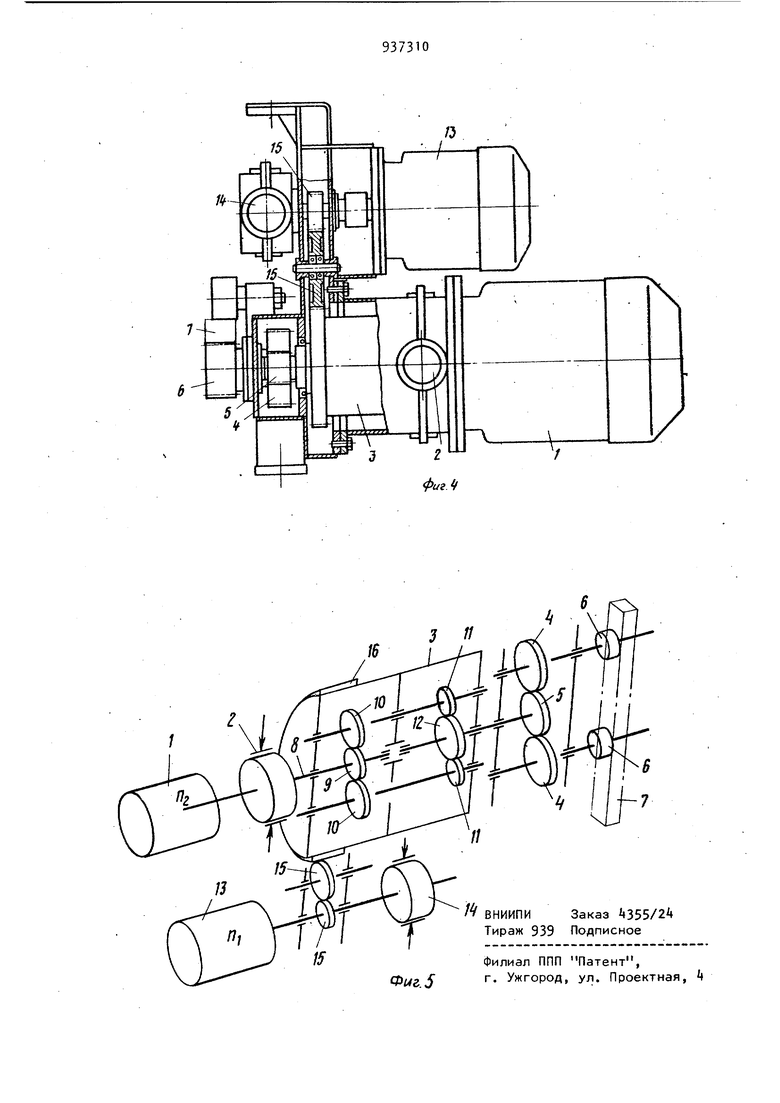
На фиг.1 представлено приводное устройство, вид сбоку; на фиг.. то же, вид в плане; на фиг.З сечение А-А на фиг,2; на фиг. - зубчатая передама дополнительного электродвигателя и планетарный редуктор, вид в плане; фиг. 5 - кинемати39373
ческая схема привода в аксонометрии. .
Приводноеустройство содержит электродвигатель 1 с тормозом 2, планетарным редуктором 3 и переда- s мей, в которую входят распределительные шестерни k, входящие в- заг цепление с выходной шестерней 5. На валах шестерен ( сидят привод ные элементы в виде шестерен 6, 10 взаимодействующих с рабочим органом - зубчатой рейкой 7 мачты подъемника.
Вал 8 электродвигателя 1 является общим и для редуктора 3. На 15 валу 8 находится солнечное колесо 9, входящее щ зацепление с сателитами ли, на валах которых закрепены такие шестерни 11, входящие в зацепление с шестерней 12, сидящей 20 а одном валу с шестерней 5.
Приводное устройство имеет дополнительный электродвигатель 13 с тормозом 1 и понижающей зубчатой передачей 15, установленной на валу 25 ополнительного электродвигателя.
На корпусе редуктора 3 с его наружной стороны смонтирован зубчатый венец 16. входящий в зацепление с одной из шестерен передачи 15 до- зо полнительного электродвигателя 13.
Приводное устройство работает следующим образом.
1ри работе привода в ту или другую сторону (подъем и спуск/ осуще- 35 ствляется последооатель.ное пключение - выключение обоих электродвигателей.
.Рассмотрим последовательность вьючения - выключения электродви- до гателей при перемещении рабочего грузонесущего органа (вверх или вниз).
Условно принимаем, что электродвигатель 13 вращает свои- вал с чис- 45 лом оборотов п , а электродвигатель 1 - с числом оборотов Dj, .
„Сначала включают дополнительный электродвигатель 13 с числом оборотов п , при этом вращение передает- 50 ся передачей 15 корпусу редуктора 3 за счет зацепления с 16. Одновременно с этим сателлиты 10, обегая колесо 9, начинают вращаться, передавая свое вращение шестерням 55 11, входящим в зацепление с шестерней 12, которая, также вращаясь, передает вращение шестерням 4, а те.
104
в свою очередь - шестерням 6.Подъемник движется с минимальной скоростью (Q,kk м/с), являющейся доводочной. Затем включают электродвигатель 1 с числом оборотов П2. для вращения в сторону, противоположную вращению двигателя 13.
При этом вращается вал 8 и сидящее на нем колесо 9, увеличивая число оборотов сателлитов 10. В результте скорость вращения приводных шестерен 6 увеличивается. Подъемник дви жется с большей скоростью (0,67 м/с) что соответствует наименьшей рабочей скорости подъемника.
Затем отключают электродвигатель 13, в результате чего подъемник начинает движение с еще большей скоростью (1,1 м/с), поскольку включесный навстречу основному двигателю он со своей передачей притормаживал вращение шестерен 6.
И, наконец, вновь подключают электродвигатель 13, но уже в том направлении, в котором вращается вал 8 электродвигателя 1. В этом случае шестерни 6 начинают вращаться еще быстрее, и подъемник движется с максимальной рабочей скоростью (1-,55 м/с).
Остановка грузонесущего органа подъемника осуществляется манипуляцией включения - выключения электродвигателями 1 и 13 в обратном Порядке: сначала отключают двигатель 13 работает только двигатель 1, затем включают двигатель 13 навстречу двигателю 1 (т.е„ валы двигателей 1 и 13 вращаются вразные стороны), а затем отключают двигатель 1 - работает только двигатель 13 с доводочной скоростью (о, м/с) При окончательной остановке отключают и двигатель 13.
Включение - выключение двигателей осуществляется универсальным переключателем с Пульта управления или из кабины подъемника, на которой закреплен весь привод.
Таким образом, в результате предпагаемого исполнения привода, в промежутке между доврдочной скоростью (о,kk м/с) и максимальной рабочей скоростью (1,55 м/с) подъемника появляются еще рабочие скорости (0,67 м/с и 1,1 м/с), т.е. две дополнительные скорости, причем переход от минимальной скорости до максимальной может осуществляться только последовательно через дополнительные скорости, т.е. плавно, с.уменьшением ускорения, что значительно снижает динамические нагрузки на подъемник с одновременным увеличением производительности за счет увеличения рабочих скоростей подъема, увеличивает срок службы подъемника, повышает комфортность пользования им, снижает энергоемкость.
Формула изобретения
Приводное устройство грузоподъем ного механизма, преимущественно реечного подъемника, содержа1цее элект родвигатель, тормоз, планетарный ре
373106
дуктор, соединенный с рабочим органом грузоподъемного механизма, о тличающееся тем, что, с целью повышения его производитель5 ности и снижения динамических нагрузок, приводное устройство снабжено дополнительным электродвигателем и зубчатой передачей, закрепленной на валу дополнительного электродвиtoгателя, а планетарный редуктор снаб- жен зубчатым венцом, смонтированным на корпусе последнего с наружной стороны и взаимодействующим с шестерней упомянутой зубчатой передачи.
15
Источники информации, принятые во внимание при экспертизе
. Гахенсон Б.Х. Планетарные механизмы тракторов. М., Машиностроение, 1972, с.101, рис.25 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРНОЛЫЖНЫЙ БУГЕЛЬНЫЙ ПОДЪЕМНИК | 1999 |
|
RU2173645C2 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2016 |
|
RU2631060C2 |
| ДВУХСКОРОСТНАЯ ПЕРЕДАЧА И РЕМЕННАЯ ПРИВОДНАЯ СИСТЕМА | 2004 |
|
RU2335839C2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| ЛЕБЕДКА | 2001 |
|
RU2192385C1 |
| МЕХАНИЗМ ПОВОРОТА | 2007 |
|
RU2340544C1 |
| Приводной механизм с переключением передачи | 2018 |
|
RU2675753C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2659163C2 |
| ТРАНСПОРТНАЯ ПРИВОДНАЯ СИСТЕМА | 2010 |
|
RU2510337C2 |
ДТ
A-A
Фи.. f
