ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к транспортной приводной системе, которая включает в себя двигатель внутреннего сгорания и электродвигатель.
Уровень техники
Традиционно для предотвращения сотрясения, которое происходит вследствие прерывания крутящего момента, происходящего во время изменения передачи, на основе трансмиссии, в которой все операции по изменению передач механической коробки передач автоматизированы с высокой эффективностью, для гибридных транспортных средств были предложены транспортные приводные системы, которые включают в себя трансмиссию с двойным сцеплением, где каждый из двух входных валов имеет набор шестерен и может по-отдельности быть соединен с двигателем посредством соответствующего сцепления, а один из входных валов может приводиться электродвигателем-генератором (см. Патентную Литературу 1).
В транспортной приводной системе 200 патентной литературы 1, как показано на фиг. 19, два входных вала 201, 202 соединяются по-отдельности с двигателем Eng посредством сцеплений C1, C2, а кроме того, с входным валом 202 соединен электродвигатель-генератор MG. Помимо этого, вводя в зацепление зубчатую муфту 205, входной вал 202 соединяется с передаточным валом 207 посредством зубчатой передачи 206 для малых оборотов, а входной вал 201 соединяется с передаточным валом 207 посредством зубчатой передачи 209 для высоких оборотов, вводя в зацепление зубчатую муфту 208.
Описывается, что электродвигатель-генератор MG приводится движущей силой от передаточного вала 207 для генерации электричества посредством рекуперации, а когда включено сцепление C2, электродвигатель-генератор MG приводится двигателем Eng, чтобы генерировать тем самым электричество.
Патентная литература
Патентная Литература 1: JP-A-2005-147312
ЗАДАЧА, КОТОРАЯ ДОЛЖНА БЫТЬ РЕШЕНА ИЗОБРЕТЕНИЕМ
В транспортной приводной системе 200, однако, ничего не написано про то, как генерировать тормозную силу, когда транспортное средство приводится от электродвигателя. В общем, для гибридного транспортного средства важным вопросом является генерация электричества электродвигателем с хорошим КПД, извлекая пользу из тормозной силы транспортного средства.
Изобретение было создано с учетом этих ситуаций, и его задача заключается в том, чтобы обеспечить транспортную приводную систему, которая может генерировать электричество, извлекая пользу из тормозной силы, когда транспортное средство движется за счет электродвигателя.
СРЕДСТВА РЕШЕНИЯ ЗАДАЧИ
Согласно п.1 формулы изобретения обеспечивается транспортная приводная система (например, транспортные приводные системы 1, 1A в варианте осуществления), содержащая двигатель внутреннего сгорания (например, двигатели 6 в варианте осуществления) и электродвигатель (например, электродвигатели 7 в варианте осуществления), при этом система содержит:
выходной вал двигателя внутреннего сгорания (например, коленчатые валы 6a в варианте осуществления), при помощи которого выводится мощность от двигателя внутреннего сгорания;
первый входной вал (например, первые выходные валы 11 в варианте осуществления), который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяют с выходным валом двигателя внутреннего сгорания с помощью первого соединяющего и разъединяющего блока (например, первых сцеплений 41 в варианте осуществления);
второй входной вал (например, вторые промежуточные валы 16 в варианте осуществления), который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяют с выходным валом двигателя внутреннего сгорания с помощью второго соединяющего и разъединяющего блока (например, второго сцепления 42 в варианте осуществления);
выходной/входной вал (например, передаточные валы 14 в варианте осуществления), который расположен параллельно выходному валу двигателя внутреннего сгорания и который выводит мощность на ведомую часть (например, ведущие колеса DW, DW в варианте осуществления);
первый набор шестерен, который расположен на первом входном валу и который включает в себя множество шестерен (например, ведущие шестерни 22a третьей скорости, ведущие шестерни 25a пятой скорости, ведущую шестерню 97a седьмой скорости в варианте осуществления), которые выборочно соединяются с первым входным валом посредством первого блока переключения (например, первых переключателей 51, 51А скоростей, третьего переключателя 52В скоростей, блокирующих механизмов 61 в варианте осуществления); второй набор шестерен, который расположен на втором входном валу и который включает в себя множество шестерен (например, ведущие шестерни 22а второй скорости, ведущие шестерни 24а четвертой скорости, ведущую шестерню 96а шестой скорости в варианте осуществления), которые выборочно соединяются со вторым входным валом посредством второго блока переключения (например, вторых переключателей 52, 52А скоростей, четвертого переключателя 52В скоростей в варианте осуществления); и третий набор шестерен, который расположен на выходном/входном валу и который включает в себя множество шестерен (например, первые общие ведомые шестерни 23b, вторые общие ведомые шестерни 24b, третью общую ведомую шестерню 96 в варианте осуществления), с которой зацепляются шестерни первого набора шестерен и шестерни второго набора шестерен, при этом, когда транспортное средство замедляется во время движения в режиме электромобиля (далее - режим ЕV) вследствие выбора шестерни для высоких оборотов из первого набора шестерен, во время включения понижающей передачи тормозная сила обеспечивается путем согласованного приведения в действие колесных тормозов, чтобы компенсировать снижение рекуперативного тормозной силы электрического электродвигателя во время понижающего изменения передачи с шестерни для высоких оборотов на шестерню для малых оборотов, в то время как рекуперация осуществляется электродвигателем.
Согласно п.2 формулы изобретения, на основе п.1, обеспечивается система, в которой первым блоком переключения является синхронизирующая муфта.
Согласно п.3 формулы изобретения, на основе п.1 или 2, обеспечивается система, в которой, когда скорость транспортного средства уменьшается до заданного значения вследствие осуществления рекуперации после выбора шестерни для малых оборотов, рекуперация останавливается, и выбирается более низкая шестерня для малых оборотов, чем упомянутая шестерня для малых оборотов.
Согласно п.4 формулы изобретения, на основе любого из пп.1-3, обеспечивается система, в которой величина рекуперации может быть увеличена в соответствии с усилием на педали, прикладываемым к тормозной педали (например, тормозным педалям 111 в варианте осуществления), а тормозная сила обеспечивается путем управления гидравлическим давлением главного цилиндра (например, главных цилиндров M в варианте осуществления) в первый раз после того, как величина рекуперации достигает предела рекуперации.
Согласно п.5 формулы изобретения обеспечивается транспортная приводная система (например, транспортные приводные системы 1, 1A в варианте осуществления), содержащая двигатель внутреннего сгорания (например, двигатели 6 в варианте осуществления) и электродвигатель (например, электродвигатели 7 в варианте осуществления), при этом система содержит:
выходной вал двигателя внутреннего сгорания (например, коленчатые валы 6a в варианте осуществления), при помощи которого выводится мощность от двигателя внутреннего сгорания;
первый входной вал (например, первые выходные валы 11 в варианте осуществления), который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяется с выходным валом двигателя внутреннего сгорания с помощью первого соединяющего и разъединяющего блока (например, первых сцеплений 41 в варианте осуществления);
второй входной вал (например, вторые промежуточные валы 16 в варианте осуществления), который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяется с выходным валом двигателя внутреннего сгорания с помощью второго соединяющего и разъединяющего блока (например, второго сцепления 42 в варианте осуществления);
выходной/входной вал (например, передаточные валы 14 в варианте осуществления), который расположен параллельно выходному валу двигателя внутреннего сгорания и который выводит мощность на ведомую часть (например, ведущие колеса DW, DW в варианте осуществления);
первый набор шестерен, который расположен на первом входном валу и который включает в себя множество шестерен (например, ведущие шестерни 22a третьей скорости, ведущие шестерни 25a пятой скорости, ведущую шестерню 97a седьмой скорости в варианте осуществления), которые выборочно соединяются с первым входным валом посредством первого блока переключения (например, первых переключателей 51, 51A скоростей, третьего переключателя 52B скоростей, блокирующих механизмов 61 в варианте осуществления);
второй набор шестерен, который расположен на втором входном валу и который включает в себя множество шестерен (например, ведущие шестерни 22a второй скорости, ведущие шестерни 24a четвертой скорости, ведущую шестерню 96a шестой скорости в варианте осуществления), которые выборочно соединяются со вторым входным валом посредством второго блока переключения (например, вторых переключателей 52, 52A скоростей, четвертого переключателя 52B скоростей в варианте осуществления); и
третий набор шестерен, который расположен на выходном/входном валу и который включает в себя множество шестерен (например, первые общие ведомые шестерни 23b, вторые общие ведомые шестерни 24b, третью общую ведомую шестерню 96 в варианте осуществления), с которой зацепляются шестерни первого набора шестерен и шестерни второго набора шестерен,
при этом, когда транспортное средство замедляется во время движения EV вследствие выбора шестерни для высоких оборотов из первого набора шестерен, тормозная сила во время включения понижающей передачи обеспечивается, извлекая пользу из последствий торможения двигателем, путем зацепления второго соединяющего и разъединяющего блока в таком состоянии, что во время понижающего переключения передачи с шестерни для высоких оборотов на шестерню для малых оборотов запускается двигатель внутреннего сгорания, и одна из шестерен второго набора шестерен выбирается вторым блоком переключения, в то время как рекуперация осуществляется электродвигателем.
Согласно п.6 формулы изобретения, на основе п.5, обеспечивается система,
в которой система оценивает запрос на замедление,
причем, когда делается запрос на замедление на шестерню для малых оборотов из первого набора шестерен, в то время как рекуперация осуществляется шестерней для высоких оборотов из первого набора шестерен, торможение двигателем достигается в таком состоянии, когда выбирается шестерня из второго набора шестерен, и выполняется предварительное включение понижающей передачи с шестерни для высоких оборотов на шестерню для малых оборотов из первого набора шестерен, в то время как транспортное средство движется за счет шестерни из второго набора шестерен.
Согласно п.7 формулы изобретения, на основе п.5 или 6, обеспечивается система,
в которой первым блоком переключения является синхронизирующая муфта.
Согласно п.8 формулы изобретения, на основе любого из пп.5-7, обеспечивается система,
в которой, когда скорость транспортного средства уменьшается до заданного значения (например, скорости транспортного средства, равной Vf в варианте осуществления) вследствие осуществления рекуперации путем выбора шестерни для малых оборотов, рекуперация останавливается, и выбирается более низкая шестерня для малых оборотов, чем упомянутая шестерня для малых оборотов.
ПРЕИМУЩЕСТВО ИЗОБРЕТЕНИЯ
Согласно п. 1 формулы изобретения, при замедлении транспортного средства во время движения EV, обеспечивая тормозную силу приведением в действие колесных тормозов совместно с рекуперативным торможением электродвигателем, энергию, выделяемую колесными тормозами в виде тепловой энергии, можно эффективно использовать в качестве рекуперативной энергии. Кроме этого транспортное средство замедляется в соответствии со скоростью транспортного средства, и поэтому, когда транспортное средство повторно ускоряется, транспортное средство можно ускорять плавно.
Согласно п.2 формулы изобретения, переключение передач может выполняться плавно.
Кроме того, потеря рекуперативного крутящего момента (тормозной силы) в результате использования синхронизирующей муфты компенсируется торможением двигателем, которое можно эффективно использовать в виде рекуперативной энергии.
Согласно п.3 формулы изобретения, когда скорость транспортного средства уменьшается до скорости, на которой рекуперация электродвигателем невозможна, для приведения транспортного средства в готовность к повторному ускорению или пуску из состояния покоя выбирается шестерня для малых оборотов, которая ниже шестерни для малых оборотов, делая тем самым возможным плавное ускорение или пуск транспортного средства из состояния покоя.
Согласно п.4 формулы изобретения, транспортное средство можно замедлять, до конца извлекая выгоду из рекуперации электродвигателем.
Согласно п.5 формулы изобретения, при замедлении транспортного средства во время движения EV, компенсируя потерю тормозной силы во время понижающего переключения последствиями торможения двигателем, энергию, выделяемую механическими тормозами в виде тепловой энергии, можно эффективно использовать в качестве рекуперативной энергии. Кроме этого транспортное средство замедляется в соответствии со скоростью транспортного средства, и при ускорении транспортного средства вновь его можно ускорять плавно.
Согласно п.6 формулы изобретения, при замедлении транспортного средства во время движения EV эффективность использования энергии можно увеличивать, выполняя включение, понижающее переключение, используя в то же время последствия торможения двигателем.
Согласно п.7 формулы изобретения, переключение передач может выполняться плавно.
Кроме того, потеря рекуперативного крутящего момента (тормозной силы) в результате использования синхронизирующей муфты компенсируется торможением двигателем, которое можно эффективно использовать в виде рекуперативной энергии.
Согласно п.8 формулы изобретения, когда скорость транспортного средства уменьшается до скорости, на которой рекуперация электродвигателем невозможна, для приведения транспортного средства в готовность к повторному ускорению или пуску из состояния покоя выбирается шестерня для малых оборотов, которая ниже шестерни для малых оборотов, делая тем самым возможным плавное ускорение или пуск транспортного средства из состояния покоя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схематическое изображение, на котором показана транспортная приводная система согласно первому варианту осуществления изобретения.
Фиг. 2 - изображения, иллюстрирующие 1-й режим EV, из которых: а) график скорости, б) изображение, показывающее условия передачи крутящего момента транспортной приводной системы.
Фиг. 3 - изображения, иллюстрирующие третий режим EV, из которых: а) график скорости, б) изображение, показывающее условия передачи крутящего момента транспортной приводной системы.
Фиг. 4 - изображения, иллюстрирующие рекуперацию в 3-м режиме EV, из которых: а) график скорости, б) изображение, показывающее условия передачи крутящего момента транспортной приводной системы.
Фиг. 5 - изображения, иллюстрирующие пятый режим EV, из которых: а) график скорости, б) изображение, показывающее условия передачи крутящего момента транспортной приводной системы.
Фиг. 6 - изображения, иллюстрирующие рекуперацию в 5-м режиме EV, из которых: а) график скорости, б) изображение, показывающее условия передачи крутящего момента транспортной приводной системы.
Фиг. 7 - схематическое изображение примера тормозной системы, которая используется в транспортной приводной системе этого варианта осуществления.
Фиг. 8 - график, показывающий распределение тормозной силы, когда транспортное средство останавливается водителем, который выжимает педаль тормоза, в то время как транспортное средство движется за счет двигателя.
Фиг. 9 - график, показывающий зависимость между моментами приведения транспортного средства и возможными областями рекуперации в соответствующих режимах EV.
Фиг. 10 - график, показывающий зависимость между тормозной силой и скоростью транспортного средства, когда во время движения EV в соответствии с замедлением транспортного средства выполняется понижающее переключение.
Фиг. 11 - график, показывающий зависимость между тормозной силой и скоростью транспортного средства, когда во время движения EV в ходе понижающего переключения, выполняемого в соответствии с замедлением транспортного средства, согласованно приводятся в действие колесные тормоза.
Фиг. 12 - контрольная блок-схема последовательности операций способа замедления транспортного средства во время движения EV.
Фиг. 13 - график, показывающий зависимость между тормозной силой и скоростью транспортного средства, когда во время движения EV в ходе понижающего переключения, исполняемого в соответствии с замедлением транспортного средства, используется торможение двигателем.
Фиг. 14 - контрольная блок-схема последовательности операций понижающего переключения, используя последствия торможения двигателем, показанного на фиг. 13.
Фиг. 15 - изображения, демонстрирующие условия передачи крутящего момента транспортной приводной системы, когда во время понижающего переключения с 5-го режима EV на 3-й режим EV используется торможение двигателем, из которых: на а) показано состояние, в котором понижающее переключение осуществляется в соединительном положении пятой скорости, а на б) показано состояние, в котором понижающее переключение осуществляется в соединительном положении третьей скорости.
Фиг. 16(a) - примерная схема, на которой показан другой пример тормозной системы, фиг. 16(b) - это график, демонстрирующий отношение между скоростью транспортного средства и усилием на педали, а фиг. 16(c) - график, показывающий распределение тормозной силы.
Фиг. 17(a) - примерная схема, на которой показан еще один пример тормозной системы, фиг. 17(b) - это график, демонстрирующий отношение между скоростью транспортного средства и усилием на педали, а фиг. 17(c) - график, показывающий распределение тормозной силы.
Фиг. 18 - схематическое изображение, на котором показана транспортная приводная система согласно второму варианту осуществления изобретения.
Фиг. 19 - схематическое изображение транспортной приводной системы, описанной в Патентной Литературе 1.
НАИЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее в этой заявке со ссылкой на чертежи будут описаны варианты осуществления транспортных приводных систем.
Первый вариант осуществления изобретения
Как показано на фиг. 1, транспортная приводная система 1 первого варианта осуществления предназначена для приведения ведущих колес DW, DW (ведомой части) посредством приводных валов 9, 9 транспортного средства (не показано) и включает в себя двигатель 6 внутреннего сгорания (именуемый далее двигателем), являющийся источником движущей силы, электродвигатель 7 (именуемый далее электродвигателем), трансмиссию 20 для передачи мощности к ведущим колесам DW, DW и планетарный зубчатый механизм 30 в качестве дифференциального редукционного зубчатого механизма, который составляет часть трансмиссии 20.
Двигатель 6 представляет собой бензиновый двигатель, например, а первое сцепление 41 (первый соединяющий и разъединяющий блок) и второе сцепление 42 (второй соединяющий и разъединяющий блок) трансмиссии 20 обеспечены на коленчатом валу 6a двигателя 6.
Электродвигатель 7 представляет собой трехфазный бесщеточный электродвигатель постоянного тока и имеет статор 71, который включает в себя 3n якоря 71a и ротор 72, который расположен таким образом, чтобы быть обращенным к статору 71.
Каждый якорь 71a включает в себя железный сердечник 71b и катушку, которая намотана вокруг железного сердечника 71b и прикреплена к корпусу, который не показан. Якоря 71a размещены по окружности через почти равные промежутки вокруг вращающегося вала. 3n катушки 71c образуют n наборов трехфазных катушек с U-фазой, V-фазой и W-фазой.
Ротор 72 имеет n постоянных магнитов 72a, которые размещены через почти равные промежутки вокруг вращающегося вала, а полярности любых двух соседних постоянных магнитов 72a отличаются друг от друга. Фиксирующая часть 72b, которая фиксирует каждый постоянный магнит 72a на месте, имеет полую цилиндрическую форму, выполненную из магнитомягкого материала. Фиксирующие части 72b расположены на внешней окружной стороне коронной шестерни 35 и соединены с солнечной шестерней 32 планетарного зубчатого механизма 30. Учитывая такую конфигурацию, ротор 72 вынужден вращаться вместе с солнечной шестерней 32 планетарного зубчатого механизма 30.
Планетарный зубчатый механизм 30 имеет солнечную шестерню 32, коронную шестерню 35, которая расположена концентрически с солнечной шестерней 32 и расположена таким образом, чтобы окружать периферию солнечной шестерни 32, планетарные шестерни 34, которые зацепляются с солнечной шестерней 32 и коронной шестерней 35, и водило 36, которое поддерживает планетарные шестерни 34 с возможностью вращения на их собственных осях и прохождения вокруг солнечной шестерни 32 и коронной шестерни 35. Таким образом, солнечная шестерня 32, коронная шестерня 35 и водило 36 выполнены с возможностью вращения относительно друг друга разным образом.
На коронной шестерне 35 предусмотрен блокировочный механизм 61, который имеет синхронизирующий механизм (синхронизатор) и выполнен с возможностью остановки (блокировки) вращения коронной шестерни 35.
Трансмиссия 20 представляет собой трансмиссию с так называемым двойным сцеплением, которая включает в себя первое сцепление 41 и второе сцепление 42, планетарный зубчатый механизм 30 и множество наборов шестерен изменения скоростей, которые будут описаны позже.
Конкретнее, трансмиссия 20 включает в себя первый основной вал 11 (первый входной вал), который расположен концентрически с коленчатым валом 6a двигателя 6 (ось A1 вращения), второй основной вал 12, соединительный вал 13, передаточный вал 14 (выходной/входной вал), который может вращаться около оси B1 вращения, которая расположена параллельно оси A1 вращения, первый промежуточный вал 15, который может вращаться около оси C2 вращения, которая расположена параллельно оси A1 вращения, второй промежуточный вал 16 (второй входной вал), который может вращаться около оси D1 вращения, которая расположена параллельно оси A1 вращения, и вал 17 заднего хода, который может вращаться около оси E1 вращения, которая расположена параллельно оси A1 вращения.
Первое сцепление 41 обеспечено на первом основном валу 11, на стороне двигателя 6, а на противоположной стороне первого основного вала 11 смонтированы солнечная шестерня 32 планетарного зубчатого механизма 30 и ротор 72 электродвигателя 7.
Таким образом, первый основной вал 11 выборочно соединяется с коленчатым валом 6a двигателя 6 при помощи первого сцепления и непосредственно соединяется электродвигателем 7, так что мощность двигателя 6 и/или электродвигателя передается к солнечной шестерне 32.
Второй основной вал 12 короче первого основного вала 11 и является полым. Второй основной вал 12 расположен с возможностью вращения относительно первого основного вала 11 таким образом, чтобы покрывать периферию части первого основного вала 11, которая находится на стороне двигателя 6. Кроме этого на втором основном валу 12, на стороне двигателя 6, обеспечено второе сцепление 42, и как одно целое на втором основном валу 12, на стороне, противоположной двигателю 6, смонтирована ведущая шестерня 27a. В результате этого второй основной вал 12 выборочно соединяется с коленчатым валом 6a двигателя 6 при помощи второго сцепления 42, так что мощность двигателя 6 передается к промежуточной ведущей шестерне 27a.
Соединительный вал 13 короче первого основного вала 11 и является полым. Соединительный вал 13 расположен с возможностью вращения относительно первого основного вала 11 таким образом, чтобы покрывать часть первого основного вала 11, которая находится на стороне, противоположной двигателю 6. Ведущая шестерня 23a третьей скорости смонтирована как целая часть на соединительном валу 13, на стороне двигателя 6, а водило 36 планетарного зубчатого механизма 30 установлено как целая часть на соединительном валу 13, на стороне, противоположной двигателю 6. Таким образом, водило 36, которое смонтировано на соединительном валу 13, и ведущая шестерня 23 третьей скорости выполнены с возможностью вращения вместе, когда планетарные шестерни 34 проходят вокруг солнечной шестерни 32 и коронной шестерни 35.
Кроме того, на основном валу 11, между ведущей шестерней 23a третьей скорости, которая смонтирована на соединительном валу 13, и промежуточной ведущей шестерней 27a, которая смонтирована на втором основном валу 12, с возможностью вращения относительно первого основного вала 11 обеспечена ведущая шестерня 25a пятой скорости. Помимо этого на первом основном валу 11 установлена с возможностью вращения вместе с первым основным валом 11 ведущая шестерня 28b заднего хода. Кроме того, между ведущей шестерней 23a третьей скорости и ведущей шестерней 25a пятой скорости обеспечен первый переключатель 51 скоростей, который выполнен с возможностью соединения первого основного вала 11 с ведущей шестерней 23a третьей скорости или ведущей шестерней 25a пятой скорости или прекращения соединения. Тогда, когда первый переключатель 51 скоростей введен в соединительное положение третьей скорости, первый основной вал 11 и ведущая шестерня 23a третьей скорости соединяются, чтобы вращаться вместе. Когда первый переключатель 51 скоростей введен в соединительное положение пятой скорости, первый основной вал 11 и ведущая шестерня 25a пятой скорости соединяются, чтобы вращаться вместе. Когда первый переключатель 51 скоростей находится в нейтральном положении, первый основной вал 11 вращается относительно ведущей шестерни 23a третьей скорости и ведущей шестерни 25a пятой скорости. Когда первый основной вал 11 и ведущая шестерня 23a третьей скорости вращаются вместе, солнечная шестерня 32, которая смонтирована на первом основном валу 11, и водило 36, которое соединено с ведущей шестерней 23a третьей скорости соединительным валом 13, вращаются вместе, а также вместе вращается коронная шестерня 35, в результате чего планетарный зубчатый механизм 30 работает как блок.
Первая промежуточная ведомая шестерня 27b смонтирована как целая часть на первом промежуточном валу 15, и эта первая промежуточная ведомая шестерня 27b зацепляется с промежуточной ведущей шестерней 27a, которая установлена на втором основном валу 12.
Вторая промежуточная ведомая шестерня 27c смонтирована как целая часть на втором промежуточном валу 16, и эта вторая промежуточная ведомая шестерня 27c зацепляется с первой промежуточной ведомой шестерней 27b, которая установлена на первом промежуточном валу. Вторая промежуточная ведомая шестерня 27c вместе с промежуточной ведущей шестерней 27a и первой промежуточной ведомой шестерней 27b составляет первую промежуточную зубчатую передачу 27A. Ведущая шестерня 22a второй скорости и ведущая шестерня 24a четвертой скорости, которые могут вращаться относительно второго промежуточного вала 16, обеспечены на втором промежуточном валу 16 в положениях, которые соответствуют ведущей шестерне 23a третьей скорости и ведущей шестерне 25a пятой скорости, которые обеспечены вокруг первого основного вала 11. Кроме того, на втором промежуточном валу 16, между ведущей шестерней 22a второй скорости и ведущей шестерней 24a четвертой скорости, обеспечен второй переключатель 52 скоростей, и этот второй переключатель 52 скоростей соединяет второй промежуточный вал 16 с ведущей шестерней 22a второй скорости или ведущей шестерней 24a четвертой скорости или прекращает соединение. Тогда, когда второй переключатель 52 скоростей входит в соединительное положение второй скорости, второй промежуточный вал 16 и ведущая шестерня 22a второй скорости вращаются вместе, а когда второй переключатель 52 скоростей входит в соединительное положение четвертой скорости, вместе вращаются второй промежуточный вал 16 и ведущая шестерня 24a четвертой скорости. Когда второй переключатель 52 скоростей находится в нейтральном положении, второй промежуточный вал 12 вращается относительно ведущей шестерни 22a второй скорости и ведущей шестерни 24a четвертой скорости.
Первая общая ведомая шестерня 23b, вторая общая ведомая шестерня 24b, парковочная шестерня 21 и последняя шестерня 26a смонтированы как одно целое на передаточном валу 14 один за другим в указанном порядке от стороны, противоположной двигателю 6.
Здесь первая общая ведомая шестерня 23b зацепляется с ведущей шестерней 23a третьей скорости, которая смонтирована на соединительном валу 13, и составляет вместе с ведущей шестерней 23a третьей скорости зубчатую пару третьей скорости. Кроме этого первая общая ведомая шестерня 23b зацепляется с ведущей шестерней 22a второй скорости, которая обеспечена на втором промежуточном валу 16, и составляет вместе с ведущей шестерней 22a второй скорости зубчатую пару 22 второй скорости.
Вторая общая ведомая шестерня 24b зацепляется с ведущей шестерней 25a пятой скорости, которая обеспечена на первом основном валу 11, и составляет вместе с ведущей шестерней 25a пятой скорости зубчатую пару 25 пятой скорости. Вторая общая ведомая шестерня 24b зацепляется с ведущей шестерней 24a четвертой скорости, которая обеспечена на втором промежуточном валу 16, и составляет вместе с ведущей шестерней 24a четвертой скорости зубчатую пару 24 четвертой скорости.
Последняя шестерня 26a зацепляется с дифференциальным зубчатым механизмом 8, а дифференциальный зубчатый механизм 8 соединен посредством приводных валов 9, 9 с ведущими колесами DW, DW. Как следствие, мощность, передаваемая к передаточному валу 14, выводится от последней шестерни 26a через дифференциальный зубчатый механизм 8 и приводные валы 9, 9 к ведущим колесам DW, DW.
Третья промежуточная ведомая шестерня 27d смонтирована как целая часть на валу 17 заднего хода, и эта третья промежуточная ведомая шестерня 27d зацепляется с первой промежуточной ведомой шестерней 27b, которая установлена на первом промежуточном валу 15. Третья промежуточная ведомая шестерня 27d вместе с промежуточной ведущей шестерней 27a и первой промежуточной ведомой шестерней 27b составляет вторую промежуточную зубчатую передачу 27B. На валу 17 заднего хода с возможностью вращения относительно вала 17 заднего хода обеспечена ведущая шестерня 28a заднего хода, и эта ведущая шестерня 28a заднего хода зацепляется с ведомой шестерней 28b заднего хода, которая установлена на первом основном валу 11. Ведущая шестерня 28a заднего хода составляет вместе с ведомой шестерней 28b зубчатую передачу 28 заднего хода. Кроме того, на стороне ведущей шестерни 28a заднего хода, которая противоположна стороне, обращенной к двигателю 6, обеспечен переключатель 53 заднего хода, и этот переключатель 53 заднего хода соединяет вал 17 заднего хода с ведущей шестерней 28a заднего хода или прекращает соединение. Тогда, когда переключатель 53 заднего хода входит в соединительное положение заднего хода, вал 17 заднего хода и ведущая шестерня 28a заднего хода вращаются вместе, а когда переключатель 53 заднего хода находится в нейтральном положении, вал 17 заднего хода и ведущая шестерня 28a заднего хода вращаются относительно друг друга.
Первый переключатель 51 скоростей, второй переключатель 52 скоростей и переключатель 53 заднего хода используют механизм сцепления, имеющий синхронизирующий механизм (синхронизатор), который обеспечивает равенство частоты вращения шестерни и частоты вращения вала, к которому присоединена шестерня.
В трансмиссии 20, которая выполнена, как было описано ранее, набор шестерен нечетных скоростей (первый набор шестерен), образованных ведущей шестерней 23a третьей скорости и ведущей шестерней 25a пятой скорости, обеспечен на первом основном валу 11, являющемся одним из двух валов переключения скоростей. Кроме того, набор шестерен четных скоростей (второй набор шестерен), который образован ведущей шестерней 22a второй скорости и ведущей шестерней 24a четвертой скорости, обеспечен на втором промежуточном валу 16, являющемся другим из двух валов переключения скоростей.
Согласно конфигурации, которая была описана ранее, транспортная приводная система 1 этого варианта осуществления имеет следующие схемы передачи крутящего момента от первой к пятой.
(1) Первая схема передачи крутящего момента - это схема передачи крутящего момента, где коленчатый вал 6a двигателя 6 соединен с ведущими колесами DW, DW посредством первого основного вала 11, планетарного зубчатого механизма 30, соединительного вала 13, зубчатой пары 23 третьей скорости (ведущей шестерни 23a третьей скорости, первой общей ведомой шестерни 23b), передаточного вала 14, последней шестерни 26a, дифференциального зубчатого механизма 8 и приводных валов 9, 9. Здесь передаточное число планетарного зубчатого механизма 30 установлено таким образом, что крутящий момент двигателя, передаваемый на приводные валы DW, DW по первой схеме передачи крутящего момента, соответствует первой скорости. А именно передаточное число, получающееся в результате умножения передаточного числа планетарного зубчатого механизма 30 на передаточное число зубчатой пары 23 третьей скорости, соответствует первой скорости.
(2) Вторая схема передачи крутящего момента - это схема передачи крутящего момента, где коленчатый вал 6a двигателя 6 соединен с ведущими колесами DW, DW посредством второго основного вала 12, первой промежуточной зубчатой передачи 27A (промежуточная ведущая шестерня 27a, первая промежуточная ведомая шестерня 27b, вторая промежуточная ведомая шестерня 27c), второго промежуточного вала 16, зубчатой пары 22 второй скорости (ведущей шестерни 22a второй скорости, первой общей ведомой шестерни 23b) или зубчатой пары 24 четвертой скорости (ведущей шестерни 24a четвертой скорости, второй общей ведомой шестерни 24b), передаточного вала 14, последней шестерни 26a, дифференциального зубчатого механизма 8 и приводных валов 9, 9.
(3) Третья схема передачи крутящего момента - это схема передачи крутящего момента, где коленчатый вал 6a двигателя 6 соединен с ведущими колесами DW, DW посредством первого основного вала 11, зубчатой пары 23 третьей скорости (ведущей шестерни 23a третьей скорости, первой общей ведомой шестерни 23b) или зубчатой пары 25 пятой скорости (ведущей шестерни 25a пятой скорости, второй общей ведомой шестерни 24b), передаточного вала 14, последней шестерни 26a, дифференциального зубчатого механизма 8 и приводных валов 9, 9 без прохождения планетарного зубчатого механизма 30.
(4) Четвертая схема передачи крутящего момента - это схема передачи крутящего момента, где электродвигатель 7 соединен с ведущими колесами DW, DW посредством планетарного зубчатого механизма 30 или зубчатой пары 23 третьей скорости (ведущей шестерни 23a третьей скорости, первой общей ведомой шестерни 23b) или зубчатой пары 25 пятой скорости (ведущей шестерни 25a пятой скорости, второй общей ведомой шестерни 24b), передаточного вала 14, последней шестерни 26a, дифференциального зубчатого механизма 8 и приводных валов 9, 9.
(5) Пятая схема передачи крутящего момента - это схема передачи крутящего момента, где коленчатый вал 6a двигателя 6 соединен с ведущими колесами DW, DW посредством второго основного вала 12, второй промежуточной зубчатой передачи 27B (промежуточной ведущей шестерни 27a, первой промежуточной ведомой шестерни 27b, третьей промежуточной ведомой шестерни 27d), вала 17 заднего хода, зубчатой передачи 28 заднего хода (ведущей шестерни 28a заднего хода, ведомой шестерни 28b заднего хода), планетарного зубчатого механизма 30, соединительного вала 13, зубчатой пары 23 третьей скорости (ведущей шестерни 23a третьей скорости, первой общей ведомой шестерни 23b), передаточного вала 14, последней шестерни 26a, дифференциального зубчатого механизма 8 и приводных валов 9, 9.
Кроме этого в транспортной приводной системе этого варианта осуществления электродвигатель 7 соединен с аккумулятором 3 через блок 2 управления питанием (далее - БУП), который управляет его работой, посредством чего электропитание электродвигателя 7 от аккумулятора 3 и рекуперация энергии в аккумулятор 7 осуществляются с помощью БУП 2. То есть электродвигатель 7 приводится в действие электроэнергией, подаваемой к нему от аккумулятора 3 посредством БУП 2. Помимо этого, когда транспортное средство замедляется, чтобы заряжать аккумулятор 3 (возврат энергии), рекуперативная генерация электричества осуществляется вращением ведущих колес DW, DW или мощностью двигателя 6. Кроме этого БУП 2 соединен с электронным блоком 5 управления (далее - ЭБУ). ЭБУ 5 - это блок управления всем транспортным средством в различных ситуациях. В ЭБУ 5 вводятся: запрос на ускорение, запрос на торможение, частота вращения двигателя, частота вращения электродвигателя, температура электродвигателя, частоты вращения первого и второго основных валов 11, 12, частота вращения передаточного вала 14, скорость транспортного средства, положение шестерен, SOC (state of charge - состояние заряда). С другой стороны, выходными данными ЭБУ 5 являются: сигнал управления двигателем 6, сигнал управления электродвигателем 7, сигналы, указывающие состояние генерации электричества, заряженное состояние и разряженное состояние аккумулятора 3, сигналы управления первым и вторым переключателями 51, 52 скоростей, сигнал управления переключателем 53 заднего хода и сигнал управления блокировкой блокировочного механизма 61. В дополнение к этому, с помощью ЭБУ 5 контролируется тормозная система 100, которая будет описана позже, а также контролируется торможение транспортной приводной системы 1.
Транспортная приводная система 1, которая выполнена, как было описано ранее, управляет включением и выключением первого и второго сцеплений 41, 42, а также контролирует соединительные положения первого переключателя 51 скоростей, второго переключателя 52 скоростей и переключателя 53 заднего хода, чтобы обеспечивать тем самым движение транспортного средства за счет двигателя 6 на скоростях с первой по пятую и задним ходом. Кроме этого транспортная приводная система 1 может способствовать движению транспортного средства или выполнять рекуперативный процесс, используя электродвигатель 7, во время движения транспортного средства. Помимо этого транспортная приводная система 1 может запускать двигатель 6, используя электродвигатель 7, или заряжать аккумулятор 3 во время холостого хода.
Сверх того, транспортная приводная система 1 обеспечивает движение EV путем использования электродвигателя 7. Транспортная приводная система 1 имеет три режима движения EV. В последующем описании, если противное не оговорено, первое и второе сцепления 41, 42 выключены, первый и второй переключатели 51, 52 скоростей и переключатель 53 заднего хода находятся в нейтральном положении, а блокировочный механизм 61 находится в состоянии выключенной блокировки (SYN LOCK OFF), которое допускает вращение коронной шестерни 35. В дальнейшем в этой заявке это состояние будет именоваться исходным состоянием. На графике скорости на фиг. 2(a) положение остановки электродвигателя 7 обозначено 0, область выше 0 означает направление вращения вперед, область ниже 0 означает направление вращения назад, солнечная шестерня 32 обозначена буквой «S», водило 36 обозначено буквой «C», а коронная шестерня 35 обозначена буквой «R». Это же верно для графиков скоростей, которые будут описаны позже. Фиг. 2(b) - это изображение, демонстрирующее условия передачи крутящего момента. Толстая заштрихованная стрелка указывает поток крутящего момента, а штриховка в стрелке соответствует штриховке в стрелках, указывающих крутящий момент на графике скорости. Кроме того, направление вращения вперед электродвигателя 7 означает направление, в котором через приводные валы 9, 9 к ведущим колесам DW, DW передается передний крутящий момент, тогда как направление вращения назад электродвигателя 7 означает направление, в котором к ведущим колесам DW, DW через приводные валы передается обратный крутящий момент.
Первый режим движения EV - это 1-й режим EV, который достигается из исходного состояния путем приведения блокировочного механизма 61 в состояние блокировки (SYN LOCK ON).
В этом состоянии, когда приводится электродвигатель 7 (крутящий момент прикладывается в направлении вращения вперед), как показано на фиг. 2(a), солнечная шестерня 32 планетарного зубчатого механизма 30, которая соединена с ротором 72, вращается в направлении вращения вперед.
Когда это происходит, как показано на фиг. 2(b), то, поскольку первое и второе сцепления 41, 42 выключены, мощность, передаваемая на солнечную шестерню 32, никогда не передается от первого основного вала 11 к коленчатому валу 6a двигателя 6. Кроме этого, поскольку блокировочным механизмом 61 не выполняется блокировка, крутящий момент электродвигателя, передаваемый на солнечную шестерню 32, передается к водилу 36, а затем посредством четвертой схемы передачи крутящего момента, которая проходит с использованием планетарного зубчатого механизма 30, передается к ведущим колесам DW, DW. Когда это происходит, то, поскольку коронная шестерня 35 заблокирована, солнечная шестерня 32 вращается с большей частотой вращения, чем водило 36, сохраняя в то же время коллинеарное отношение, показанное на фиг. 2(a), благодаря характеристикам планетарного зубчатого механизма 30. То есть передается крутящий момент электродвигателя, пониженный планетарным зубчатым механизмом 30.
Второй режим движения EV - это 3-й режим EV, который достигается из исходного состояния путем введения первого переключателя 51 скоростей из нейтрального положения в соединительное положение третьей скорости. Как было описано ранее, вводя первый переключатель 51 скоростей в соединительное положение третьей скорости, планетарный зубчатый механизм 30 делается единым блоком.
В этом состоянии, когда приводится электродвигатель 7 (крутящий момент прикладывается в направлении вращения вперед), планетарный зубчатый механизм 30, который соединен с ротором 72, вращается в направлении вращения вперед как блок. Когда это происходит, то, поскольку первое и второе сцепления 41, 42 выключены, мощность, передаваемая на солнечную шестерню 32, никогда не передается от первого основного вала 11 к коленчатому валу 6a двигателя 6. Затем крутящий момент электродвигателя передается к ведущим колесам DW, DW через четвертую схему передачи крутящего момента, которая проходит с использованием зубчатой пары 23 третьей скорости.
Когда рекуперация осуществляется, в то время как транспортное средство движется в 3-м режиме движения EV, как показано на фиг. 4, к электродвигателю 7 в направлении, в котором понижается частота вращения ротора 72, прикладывается рекуперативный крутящий момент, то есть в обратном направлении, в результате чего в электродвигателе 7 может генерироваться электричество, прикладывая в то же время к транспортному средству тормозную силу, позволяя тем самым заряжать аккумулятор 3.
Третий режим движения EV - это 5-й режим EV, который достигается из исходного состояния путем введения первого переключателя 51 скоростей из нейтрального положения в соединительное положение пятой скорости.
В этом состоянии, когда приводится электродвигатель 7 (крутящий момент прикладывается в направлении вращения вперед), солнечная шестерня 32 планетарного зубчатого механизма 30, которая соединена с ротором 72, вращается в направлении вращения вперед, как показано на фиг. 5(b). Когда это происходит, как показано на фиг. 5(b), то, поскольку первое и второе сцепления 41, 42 выключены, мощность, передаваемая на солнечную шестерню 32, никогда не передается от первого основного вала 11 к коленчатому валу 6a двигателя 6. Затем крутящий момент электродвигателя передается к ведущим колесам DW, DW через четвертую схему передачи крутящего момента, которая проходит с использованием пятой зубчатой пары 25. Когда это происходит, солнечная шестерня 32 вращается с частотой вращения электродвигателя 7, и водило 36 вращается, будучи соединенным с передаточным валом 14 посредством зубчатой передачи 23 третьей скорости. Поэтому между солнечной шестерней 32 и водилом 36 создается заданное дифференциальное вращение, и коронная шестерня 35 вращается с большей частотой вращения, чем водило 36, сохраняя в то же время коллинеарное отношение, показанное на фиг. 5(a), благодаря характеристикам планетарного зубчатого механизма 30.
Когда рекуперация осуществляется, в то время как транспортное средство движется в 5-м режиме движения EV, как показано на фиг. 6, к электродвигателю 7 в направлении, в котором понижается частота вращения ротора 72, прикладывается рекуперативный крутящий момент, то есть в обратном направлении, в результате чего в электродвигателе 7 может генерироваться электричество, прикладывая в то же время к транспортному средству тормозную силу, позволяя тем самым заряжать аккумулятор 3.
Вслед за этим будет описан пример тормозной системы, которая используется в транспортной приводной системе 1 этого варианта осуществления.
Как показано на фиг. 7, тормозная система 100, включает в себя главный цилиндр M тандемного типа, гидравлический усилитель 113, которым в соответствии с тормозным усилием, подводимым от тормозной педали 111, которая является элементом управления тормозами для применения к главному цилиндру M, регулируется гидравлическое давление в источнике 112 создания гидравлического давления, имитатор 114 сопротивления ходу педали, который помещен между тормозной педалью 111 и гидравлическим усилителем 113.
Корпус 116 главного цилиндра M выполнен цилиндрической формы с дном, которая закрыта у его переднего конца, а задний конец корпуса 116 цилиндра соединен с передним концом кожуха 117, который содержит гидравлический усилитель 113. Задний конец корпуса 116 цилиндра герметично помещен в переднюю часть кожуха 117. Сепаратор 118, первая втулка 119 и вторая втулка 120, которые герметично помещены в кожух 117, удерживаются между задним концом корпуса 116 цилиндра и кожухом 117, причем первая втулка 119 содержится между сепаратором 118 и второй втулкой 120.
В корпусе 116 цилиндра выполнено первое отверстие 121 цилиндра, и первое отверстие 121 цилиндра закрыто на его переднем конце. Главный цилиндр M образован задним главным поршнем 123 и передним главным поршнем 124. Задний главный поршень 123 обращен с его тыльной стороны к гидравлической камере 122 усилителя и смещен назад пружиной. Задний главный поршень 123 помещен с возможностью скольжения в первое отверстие 121 цилиндра. Передний главный поршень 124 расположен спереди заднего главного поршня 123, смещен назад пружиной и помещен с возможностью скольжения в первое отверстие 121 цилиндра. Между задним главным поршнем 123 и передним главным поршнем 124 выполнена задняя выходная гидравлическая камера 125, а между закрытой частью переднего конца корпуса 116 цилиндра и передним главным поршнем 124 выполнена передняя выходная гидравлическая камера 126.
В корпусе 116 цилиндра обеспечены задний выходной порт 127 и передний выходной порт 128. Задний выходной порт 127 сообщается с задней выходной гидравлической камерой 125, а передний выходной порт 128 сообщается с передней выходной гидравлической камерой 126. Кроме этого в задней выходной гидравлической камере 125, между задним главным поршнем 123 и передним главным поршнем 124, в сжатом состоянии обеспечена задняя возвратная пружина 129, причем задняя возвратная пружина 129 выполнена с возможностью смещения заднего главного поршня 123 назад. Кроме этого в передней выходной гидравлической камере 126, между передним закрытым концом корпуса 116 цилиндра и передним главным поршнем 124, в сжатом состоянии обеспечена передняя возвратная пружина 130, причем передняя возвратная пружина 130 выполнена с возможностью смещения переднего главного поршня 124 назад.
К главному цилиндру M присоединен резервуар 131. В резервуаре 131 первая, вторая и третья камеры 131a, 131b, 131c хранения текучих сред выполнены таким образом, чтобы быть независимо отделенными друг от друга. Задняя соединительная цилиндрическая часть 132, имеющая цилиндрическую форму, и передняя соединительная цилиндрическая часть 133, имеющая цилиндрическую форму, обеспечены за одно целое на главном цилиндре M таким образом, чтобы выдаваться вверх в местах, которые отстоят друг от друга в осевом направлении. Задняя соединительная цилиндрическая часть 132 сообщается со второй камерой 131b хранения текучей среды, а передняя соединительная цилиндрическая часть сообщается с первой камерой 131a хранения текучей среды.
Для обеспечения сообщения задней выходной гидравлической камеры 125 со второй камерой 131b хранения текучей среды, когда задний главный поршень 123 возвращается в предельное положение отведения, на заднем главном поршне 123 установлен центральный клапан 134. Для обеспечения сообщения передней выходной гидравлической камеры 126 с первой камерой 131a хранения текучей среды, когда передний главный поршень 124 возвращается в предельное положение отведения, на переднем главном поршне 124 установлен центральный клапан 135.
Задний выходной порт 127 главного цилиндра M соединен посредством гидравлического модулятора 136 с правым передним колесным тормозом B1 и левым задним колесным тормозом B2. Передний выходной порт 128 соединен посредством гидравлического модулятора 136 с левым передним колесным тормозом B3 и правым задним колесным тормозом B4. Таким образом, гидравлическим модулятором 136 является традиционно известный гидравлический модулятор, который может осуществлять автоматическое управление тормозами, как, например, управление противоблокировкой тормозов, исполняемое, когда применяются тормоза, и регулирование тягового усилия, исполняемого, когда тормоза не применяются, свободно регулируя тормозное давление, которое выводится из заднего и переднего выходных портов 127, 128.
Гидравлический усилитель 113 включает в себя цилиндрический опорный поршень 138, клапанное устройство 139 регулирования давления, которое встроено в опорный поршень 138, управляющий поршень 141, первый реактивный поршень 142 и второй реактивный поршень 143. Опорный поршень 138 обращен своим передним концом к гидравлической камере 122 усилителя таким образом, чтобы непосредственно толкать задний главный поршень 123 главного цилиндра M с его задней стороны. Опорный поршень 138 помещен с возможностью скольжения в сепаратор 118 и вторую втулку 120. Управляющий поршень 141 приводит в действие клапанное устройство 139 регулирования давления, чтобы регулировать давление путем уравновешивания реактивной силы, основанной на гидравлическом давлении в камере 140 создания гидравлического давления усилителя, которая соединяется с гидравлической камерой 122 усилителя, с величиной торможения, которая подводится от тормозной педали 111. Первый реактивный поршень 142 помещен между клапанным устройством 139 регулирования давления и управляющим поршнем 141 таким образом, чтобы добавлять управляющему поршню 141 реактивной силы, основываясь на гидравлическом давлении в камере 140 создания гидравлического давления усилителя. Второй реактивный поршень 143 помещен между опорным поршнем 138 и первым реактивным поршнем 142 таким образом, чтобы прикладывать к управляющему поршню 141 выходное гидравлическое давление от источника 112 создания гидравлического давления и реактивную силу от реактивной пружины 144 в дополнение к реактивной силе от первого реактивного поршня 142, когда усиливается величина торможения, подводимая тормозной педалью 111.
Соединительный канал 145 для текучей среды, который сообщается с гидравлической камерой 122 усилителя, входной порт 146, который соединен с источником 112 создания гидравлического давления, выходной канал 147 для текучей среды, который сообщается камерой 140 создания гидравлического давления, и порт 148 выпуска, который сообщается с камерой 149 выпуска, выполненной в кожухе 117 позади второй втулки 120, обеспечены последовательно в этом порядке спереди с расстоянием между друг другом.
Источник 112 создания гидравлического давления соединен с входным портом 146. Этот источник 112 создания гидравлического давления включает в себя насос 151, который нагнетает рабочую текучую среду из третьей камеры 131c хранения текучей среды резервуара 131, и накопитель, который соединен с нагнетательной стороной насоса 151. Работа насоса 151 регулируется в соответствии с гидравлическим давлением накопителя 152, которое обнаруживается датчиком 53 гидравлического давления в кожухе 117, и от источника 112 создания гидравлического давления к входному порту 146 подается высокое постоянное гидравлическое давление. Кроме того, с третьей камерой 131c хранения текучей среды резервуара 131 соединен порт 148 выпуска.
Клапанное устройство 139 регулирования давления образовано клапаном повышения давления, который помещен между входным портом 146 и камерой 140 создания гидравлического давления усилителя, и клапаном понижения давления, который помещен между камерой 140 создания гидравлического давления усилителя и камерой 149 выпуска. Таким образом, гидравлическое давление усилителя, которое получается вследствие регулирования гидравлического давления в источнике 112 создания гидравлического давления, создается в камере 140 создания гидравлического давления усилителя путем открывания и закрывания клапана повышения давления в ответ на нажатие тормозной педали 111. В гидравлическом усилителе 113, выполненном, как описано выше, величина торможения подводится от тормозной педали 111 через имитатор 114 сопротивления ходу педали к управляющему поршню 141, в силу чего от управляющего поршня 141 к первому реактивному поршню 142 прикладывается напорное давление. Таким образом, в состоянии, в котором величина перемещения управляющего поршня 141 вперед относительно опорного поршня 138 меньше заданного значения, только первый реактивный поршень 142 примыкает к управляющему поршню 141. Клапан понижения давления клапанного устройства 139 регулирования давления закрывается, когда первый реактивный поршень 142 продвигается вперед, в результате чего сообщение между камерой 140 создания гидравлического давления усилителя и камерой 149 выпуска прерывается. Когда управляющий поршень 141 и первый реактивный поршень 142 продвигаются дальше вперед, отрывается клапан повышения давления клапанного устройства 139 регулирования давления.
Гидравлическое давление камеры 140 создания гидравлического давления усилителя прикладывается к переднему концу первого реактивного поршня 142 при закрытом клапане понижения давления. Когда первый реактивный поршень 142 и управляющий поршень 141 отходят настолько, что величина торможения от тормозной педали 111 уравновешивается гидравлическим давлением, основанным на гидравлическом давлении в камере 140 создания гидравлического давления усилителя, клапан понижения давления открывается, а клапан повышения давления закрывается. Повторяя открывание и закрывание клапана повышения давления и клапана понижения давления, выходное гидравлическое давление источника 112 создания гидравлического давления регулируется до гидравлического давления усилителя, которое соответствует величине торможения от тормозной педали 111, для приложения к камере 140 создания гидравлического давления усилителя. Кроме этого, когда величина перемещения управляющего поршня 141 вперед относительно опорного поршня 138 достигает и превышает заданное значение, не только первый реактивный поршень 142, но также и второй реактивный поршень 143 приводятся в соприкосновение с управляющим поршнем 141, вследствие чего не только гидравлическое давление, которое толкает второй реактивный поршень 143 назад посредством гидравлического давления от источника 112 создания гидравлического давления, но также и усилие пружины реактивной пружины 144 добавляются в качестве реактивной силы, увеличивая этим реактивную силу, действующую на управляющий поршень 141.
Соединительный канал 145 для текучей среды, который обеспечен в кожухе 117 с возможностью сообщения с гидравлической камерой 122 усилителя, соединен с источником 112 создания гидравлического давления посредством автоматического электромагнитного клапана 154 приложения тормозного давления, которым является нормально закрытый линейный соленоидный клапан, и который соединен с третьей камерой 131c хранения текучей среды резервуара 131 через обеспечивающий рекуперацию электромагнитный клапан 155 понижения давления, которым является нормально закрытый линейный соленоидный клапан. То есть нормально закрытый автоматический электромагнитный клапан 154 приложения тормозного давления помещен между гидравлической камерой 122 усилителя и источником 112 создания гидравлического давления, а нормально закрытый обеспечивающий рекуперацию электромагнитный клапан 155 понижения давления помещен между гидравлической камерой 122 усилителя и резервуаром 131.
Кроме этого выходной канал 147 для текучей среды, который сообщается с камерой 140 создания гидравлического давления усилителя, соединен с соединительным 145 каналом для текучей среды посредством автоматического электромагнитного клапана 156 понижения тормозного давления и обеспечивающего рекуперацию электромагнитного клапана 157 приложения давления, которые соединены последовательно. Как автоматическим электромагнитным клапаном 156 понижения тормозного давления, так и обеспечивающим рекуперацию электромагнитным клапаном 157 приложения давления являются нормально открытые линейные соленоидные клапаны.
Параллельно автоматическому электромагнитному клапану 156 понижения тормозного давления подсоединен первый однолинейный клапан 158, и этот первый однолинейный клапан 158 обеспечивает поток рабочей текучей среды из выходного канала 147 для текучей среды в соединительный канал 145 для текучей среды. Помимо этого параллельно обеспечивающему рекуперацию электромагнитному клапану 157 приложения давления подсоединен второй однолинейный клапан 159, и этот второй однолинейный клапан 159 обеспечивает поток рабочей текучей среды из соединительного канала для текучей среды в выходной канал 147 для текучей среды.
То есть автоматический электромагнитный клапан 156 понижения тормозного давления, параллельно которому подсоединен первый однолинейный клапан 158, и обеспечивающий рекуперацию электромагнитный клапан 159 приложения давления, параллельно которому подсоединен второй однолинейный клапан 159, помещены между камерой 140 создания гидравлического давления усилителя и гидравлической камерой 122 усилителя.
Более того, между выходным каналом 147 для текучей среды и автоматическим электромагнитным клапаном 156 понижения тормозного давления подсоединен гидравлический датчик 160 обнаружения величины торможения. Между обеспечивающим рекуперацию электромагнитным клапаном 157 приложения давления и соединительным каналом 145 для текучей среды подсоединен автоматический гидравлический датчик 161 управления тормозами с обратной связью.
Таким образом, автоматический электромагнитный клапан 154 приложения тормозного давления помещен между источником 112 создания гидравлического давления и гидравлической камерой 122 усилителя. Автоматический электромагнитный клапан 156 понижения тормозного давления и первый однолинейный клапан 158, который подсоединен параллельно автоматическому клапану 156 понижения тормозного давления с возможностью обеспечения потока тормозной текучей среды из камеры 140 создания гидравлического давления усилителя в гидравлическую камеру 122 усилителя, помещены между камерой 140 создания гидравлического давления усилителя и гидравлической камерой 122 усилителя. Соответственно, когда тормозная педаль 111 не выжата, то есть когда клапанное устройство 139 регулирования давления не приводится в действие, управляя автоматическим электромагнитным клапаном 154 приложения тормозного давления и автоматическим электромагнитным клапаном 156 понижения тормозного давления путем открывания или закрывания, чтобы регулировать гидравлическое давление гидравлической камеры 122 усилителя, тоже можно осуществлять автоматическое управление торможением, при котором без применения тормозов к колесным тормозам B1-B4 обеспечивается приложение тормозного гидравлического давления. Более того, когда, выжимая тормозную педаль 111 при закрытом автоматическом электромагнитном клапане 156 понижения тормозного давления, в то время как применяется автоматический тормоз, клапан 139 регулирования давления приводится в действие для создания в камере 140 создания гидравлического давления усилителя более высокого гидравлического давления, чем гидравлическое давление в гидравлической камере 112 усилителя, можно через первый однолинейный клапан 158 обеспечивать приложение гидравлического давления в камере 140 создания гидравлического давления усилителя к гидравлической камере 122 усилителя, в результате чего главный цилиндр M может приводиться в действие таким же образом, как и при обычном торможении.
Кроме того, между гидравлической камерой 122 усилителя и резервуаром 131 помещен обеспечивающий рекуперацию электромагнитный клапан 155 понижения давления, а между камерой 140 создания гидравлического давления усилителя и гидравлической камерой 122 усилителя помещены обеспечивающий рекуперацию электромагнитный клапан 157 приложения давления и второй однолинейный клапан 159, который подсоединен параллельно обеспечивающему рекуперацию электромагнитному клапану 157 приложения давления с возможностью обеспечения потока тормозной текучей среды из гидравлической камеры 122 усилителя в камеру 140 создания гидравлического давления усилителя. Следовательно, управляя обеспечивающим рекуперацию электромагнитным клапаном 157 приложения давления и обеспечивающим рекуперацию электромагнитным клапаном 155 понижения давления путем открывания и закрывания для регулирования гидравлического давления в гидравлической камере 122 усилителя во время рекуперации с применяемыми тормозами, главный цилиндр M может выдавать тормозное гидравлическое давление, которое является компенсацией до обычного торможения. Когда тормозная педаль 111 отпускается при закрытом обеспечивающем рекуперацию электромагнитном клапане 157 приложения давления, гидравлическое давление в гидравлической камере 122 усилителя к резервуару 131 может быть ослаблено через второй однолинейный клапан 159.
Имитатор 114 сопротивления ходу педали включает в себя входной поршень 162, который герметично и с возможностью скольжения в осевом направлении установлен в управляющий поршень 141, и пружинное устройство 163, которое помещено между входным поршнем 162 и управляющим поршнем 141 и содержится в управляющем поршне 141.
Входной шток 64, который соединен с тормозной педалью 111, соединен с входным поршнем 162 на его передней концевой части с возможностью перемещения из стороны в сторону. То есть тормозное усилие согласно нажатию тормозной педали 111 подводится через входной шток 164 к входному поршню 162, а входной поршень 162 продвигается вперед в соответствии с подводимым тормозным усилием.
Пружинное устройство 163 включает в себя упругий элемент 165, который выполнен цилиндрической формы, используя упругий материал, такой как резина, и металлическую винтовую пружину 166, пружинная нагрузка которой установлена меньше, чем у упругого элемента 165. Упругий элемент 165 и винтовая пружина 166 помещены последовательно между входным поршнем 162 и управляющим поршнем 141 таким образом, что усилие пружины, оказываемое винтовой пружиной 166, прикладывается к управляющему поршню 141 в первоначальной стадии выжимания тормозной педали 111, и упругий элемент 165 начинает подвергаться упругой деформации после того, как приложение усилия винтовой пружины 166 к управляющему поршню 141 завершено.
Задняя концевая часть колпака 167, который закрывает выступающую из кожуха 117 часть управляющего поршня 141, смонтирована на входном штоке 64, а передняя концевая часть колпака 167 смонтирована на задней концевой части кожуха 117.
В тормозной системе 100, выполненной, как было описано ранее, ЭБУ 5 управляет автоматическим электромагнитным клапаном 154 приложения давления и автоматическим электромагнитным клапаном 156 понижения тормозного давления для открывания и закрывания, а также управляет обеспечивающим рекуперацию электромагнитным клапаном 155 понижения давления и обеспечивающим рекуперацию электромагнитным клапаном 157 приложения давления для открывания и закрывания. Благодаря этому управлению, даже когда водитель не выжимает тормозную педаль 111, и тормоза не применяются, может осуществляться не только автоматическое управление тормозами, при котором к колесным тормозам B1-B4 прикладывается гидравлическое давление, но также может осуществляться так называемое обеспечивающее рекуперацию управление, при котором в тормозной системе 100 обеспечивается тормозной крутящий момент, получаемый путем вычитания рекуперативного тормозного момента из целевого тормозного момента на основе рекуперативного тормозного момента, который изменяется в соответствии с величиной электричества, генерируемого электродвигателем 7.
На фиг. 8 показано распределение тормозной силы в тормозной системе 100, когда водитель путем выжимания тормозной педали останавливает транспортное средство, движущееся за счет двигателя. В этой тормозной системе 100 торможение двигателем достигается за счет трения двигателя, а тормозная сила создается в результате осуществления в электродвигателе 7 определенной величины рекуперации при незадействованных тормозах в момент времени, когда водитель отпускает педаль акселератора (не показана). Затем, когда водитель выжимает тормозную педаль 111, в электродвигателе 7 применяется рекуперативное торможение (рекуперация при задействованных тормозах), соответствующее пределу рекуперации, рассчитанному ЭБУ 5. Этим создается тормозная сила, а в случае недостаточности тормозной силы, создаваемой рекуперацией с задействованными тормозами, для обеспечения целевого тормозного крутящего момента, недостаточная тормозная сила компенсируется фрикционной тормозной силой, создаваемой колесными тормозами B1-B4 тормозной системы 100. Далее, когда транспортное средство замедляется до заданной скорости транспортного средства Vc, величина рекуперативного торможения электродвигателем 7 сокращается, в то время как величина фрикционного торможения колесными тормозами B1-B4 тормозной системы 100 увеличивается. Когда транспортное средство еще замедляется до заданной скорости транспортного средства Vd, первое и второе сцепления 41, 42 (стартовые сцепления) выключаются, чтобы останавливать тем самым рекуперацию. Наконец, транспортное средство останавливается фрикционным тормозным действием колесных тормозов B1-B4 тормозной системы 100.
Таким образом, как было описано ранее, согласно транспортной приводной системе этого варианта осуществления, величина рекуперации может увеличиваться в соответствии с усилием на педали, прикладываемым к тормозной педали 111. Тогда гидравлическое давление главного цилиндра M контролируется в первый раз после того, как величина рекуперации достигает предела рекуперации для обеспечения тормозами тормозной силы. Поэтому транспортное средство можно замедлять, извлекая до конца пользу из рекуперации электродвигателем 7.
После этого будет описано управление рекуперацией во время движения EV.
Как показано на фиг. 9, возможная область рекуперации в 5-м режиме EV находится в области низкого крутящего момента, высокой частоты вращения. Возможная область рекуперации в 3-м режиме EV находится в области высокого крутящего момента, низкой частоты вращения. Возможная область рекуперации в 1-м режиме EV находится в области высокого крутящего момента, низкой частоты вращения. Следовательно, когда транспортное средство приходит в состояние покоя, после того, как транспортное средство двигалось на высоких скоростях в 5-м режиме EV, в 5-м режиме EV рекуперация не может осуществляться электродвигателем 7 после того, как транспортное средство было замедлено до заданной скорости транспортного средства, приводя к состоянию, в котором генерация электричества не может осуществляться электродвигателем 7, эффективно используя рекуперативную энергию.
Тогда в областях вне возможной области рекуперации в 5-м режиме EV решают замедлять транспортное средство тормозной силой, производимой колесными тормозами B1-B4 тормозной системы 100. Однако в этом случае нельзя эффективно использовать энергию торможения. Кроме того, при повторном ускорении транспортного средства, его ускорение происходит в 5-м режиме EV, а поэтому требуемый приводной крутящий момент не может быть получен, и транспортное средство будет ускоряться медленно. С другой стороны, решают включать понижающую передачу с 5-го режима EV на 3-й режим EV и на 1-й режим EV. При понижающем переключении с 5-го режима EV на 3-й режим EV, в то время как первый переключатель 51 скоростей, который сейчас введен в соединительное положение пятой скорости, вводится в соединительное положение третьей скорости, необходимо осуществлять контроль нулевого крутящего момента электродвигателя 7. Кроме этого контроль нулевого крутящего момента электродвигателя 7 нужно осуществлять при понижающем переключении с 3-го режима EV на 1-й режим EV, пока первый переключатель 51 скоростей, который сейчас введен в соединительное положение третьей скорости, переключается в нейтральное положение, а блокировочный механизм 61 устанавливается из состояния LOCK OFF («БЛОКИРОВКА ВЫКЛЮЧЕНА») в состояние LOCK ON («БЛОКИРОВКА ВКЛЮЧЕНА»). Однако, как показано на фиг. 10, проблема этого понижающего переключения заключается в том, что во время контроля нулевого крутящего момента электродвигателя 7 не может быть гарантирована тормозная сила транспортного средства.
Тогда в транспортной приводной системе 1 этого варианта осуществления при понижающем переключении с 5-го режима EV на 3-й режим EV осуществляется вышеупомянутое автоматическое управление тормозами, при котором потеря тормозной силы, происходящая, пока первый переключатель 51 скоростей, который сейчас введен в соединительное положение пятой скорости, вводится в соединительное положение третьей скорости, компенсируется тормозной силой колесных тормозов B1-B4 тормозной системы 100.
Для описания этого управления переключением передач со ссылкой на фиг. 11 и 12 рекуперация осуществляется в 5-м режиме EV с отпущенной (OFF) педалью акселератора (S01). Тогда, когда скорость транспортного средства снижается до скорости Va, рекуперативный крутящий момент электродвигателя 7 постепенно теряется, в то время как колесные тормоза B1-B4 тормозной системы 100 приводятся в действие, чтобы постепенно увеличивать тормозную силу для поддержания заданной тормозной силы (S02). Далее в состоянии, в котором рекуперативный крутящий момент теряется полностью (в состоянии, в котором тормозная сила обеспечивается только фрикционным тормозом), путем введения первого переключателя 51 скоростей, который сейчас введен в соединительное положение пятой скорости, в соединительное положение третьей скорости осуществляется понижающее переключение (S03). После этого рекуперация осуществляется в 3-м режиме EV, постепенно увеличивая в то же время рекуперативный крутящий момент электродвигателя 7, а одновременно обеспечивается постепенное снижение тормозной силы колесными тормозами B1-B4 тормозной системы 100 для поддержания заданной тормозной силы (S04). Колесные тормоза B1-B4 тормозной системы 100 отсоединяются, чтобы прекращать приложение тормозной силы, и после того как тормозная сила электродвигателя 7 достигает в 3-м режиме EV заданной тормозной силы рекуперация осуществляется в 3-м режиме EV (S05). Кроме этого, когда скорость транспортного средства снижается до скорости Vb, рекуперативный крутящий момент электродвигателя 7 постепенно теряется, в то время как для постепенного увеличения тормозной силы приводятся в действие колесные тормоза B1-B4 тормозной системы 100, чтобы поддерживать заданную тормозную силу (S06). Для замедления транспортного средства, скорость которого снижена до скорости транспортного средства Vf или ниже, требуемая тормозная сила не обеспечивается рекуперацией даже в случае, когда осуществляется понижающее переключение на 1-й режим EV. Поэтому транспортное средство останавливается тормозной силой колесных тормозов B1-B4 тормозной системы 100 (S07). В течение этого времени первый переключатель 51 скоростей, который введен в соединительное положение третьей скорости, переключается в нейтральное положение, а блокировочный механизм 61 устанавливается из состояния LOCK OFF в состояние LOCK ON, в результате чего в транспортном средстве осуществляется переключение на 1-й режим EV, чтобы быть готовым для повторного ускорения.
Согласно транспортной приводной системе 1 этого варианта осуществления, который был описан ранее, когда во время движения в 5-м режиме EV вследствие выбора ведущей шестерни 25a пятой скорости скорость транспортного средства уменьшается, обеспечивается согласованное приведение в действие колесных тормозов B1-B4 тормозной системы 100, чтобы компенсировать уменьшение рекуперативной тормозной силы электродвигателя 7, пока при осуществлении электродвигателем 7 рекуперации с помощью первого переключателя 51 скоростей осуществляется понижающее переключение с ведущей шестерни 25a пятой скорости на ведущую шестерню 23a третьей скорости, то есть во время осуществления понижающего переключения с 5-го режима EV на 3-й режим EV с рекуперацией, осуществляемой электродвигателем 7, делая тем самым возможным обеспечение тормозной силы во время понижающего переключения. Следовательно, энергию, которая традиционно выделяется в виде тепловой энергии, когда тормозная сила создается колесными тормозами, можно эффективно использовать как рекуперативную энергию. Помимо этого транспортное средство замедляется в соответствии со скоростью транспортного средства, а следовательно, при повторном ускорении транспортного средства, его можно ускорить заново плавно.
Кроме этого, когда после осуществления рекуперации на ведущей шестерне 23a третьей скорости нельзя получать требуемую рекуперацию, чтобы быть готовым для повторного ускорения, осуществляется понижающее переключение с 3-го режима EV на 1-й режим EV, обеспечивая тем самым плавное ускорение транспортного средства, когда осуществляется его повторное ускорение.
Помимо этого вместо колесных тормозов B1-B4 тормозной системы 100, управляемых с целью компенсации потери тормозной силы, которая происходит во время понижающего переключения при осуществляемой рекуперации, потерю тормозной силы можно предотвращать, используя последствия торможения двигателем.
Обращаясь к фиг. 13 и 14, это управление переключением передач будет описано отдельно. Рекуперация осуществляется в 5-м режиме EV в состоянии, в котором во время движения EV в 5-м режиме EV педаль акселератора, не показана, отпущена (OFF) (S11). Тогда, когда скорость транспортного средства снижается до Va', в то время как осуществляется рекуперация, включается первое сцепление 41, чтобы запускать двигатель 6 (S12). После того как двигатель 6 запущен, первое сцепление 41 выключается, и второй переключатель 52 скоростей перемещается из нейтрального положения для введения в соединительное положение четвертой скорости (S13). В этом состоянии первое и второе сцепления 41, 42 выключены, а, двигатель 6, следовательно, отсоединен. Затем, чтобы достигать торможения двигателем, постепенно включается второе сцепление 42, сокращая в то же время величину рекуперации для поддержания тормозной силы (S14). На фиг. 14(a) показано состояние, в котором торможение двигателем достигается в состоянии, в котором первое сцепление 41 выключено, тогда как второе сцепление 42 включено, а второй переключатель 52 скоростей введен в соединительное положение четвертой скорости при оставленном введенным в соединительное положение пятой скорости первым переключателем 51 скоростей. Далее, после того как второе сцепление 42 полностью включено, первый переключатель 51 скоростей, который сейчас введен в соединительное положение пятой скорости, вводится (осуществляется его предварительное перемещение) в соединительное положение третьей скорости, чтобы осуществлять тем самым понижающее переключение (S15). На фиг. 11(b) показано состояние, в котором первый переключатель 51 скоростей введен из соединительного положения пятой скорости, из состояния, показанного на фиг. 11(a), в соединительное положение третьей скорости. После этого постепенно выключают второе сцепление 42, которое сейчас включено, увеличивая в то же время величину рекуперации в 3-м режиме EV, чтобы поддерживать тормозную силу (S16). Затем, после того как второе сцепление 42 полностью выключено, двигатель 6 останавливается, а рекуперация продолжается в 3-м режиме EV (S17). Когда скорость транспортного средства снижается дальше до Vb', рекуперативный крутящий момент электродвигателя 7 постепенно теряется для осуществления контроля нулевого крутящего момента (S18). Скорость транспортного средства Vf' - это скорость транспортного средства, при которой в 3-м режиме EV нельзя получать требуемую рекуперацию. Что касается торможения на скорости транспортного средства, равной Vf или ниже, требуемую тормозную силу нельзя получить от рекуперации даже в случае, когда транспортное средство замедляется до 1-го режима EV. Поэтому транспортное средство останавливается согласно намерению водителя тормозной силой механического тормоза 105, который будет описан позже. В течение этого времени первый переключатель 51 скоростей, который введен в соединительное положение третьей скорости, перемещается в нейтральное положение, а блокировочный механизм 61 устанавливается из состояния LOCK OFF в состояние LOCK ON, в результате чего осуществляется понижающее переключение на 1-й режим EV, чтобы быть готовым для повторного ускорения.
Для описанного выше переключения передач может быть использована тормозная система 100A, показанная на фиг. 16.
Как показано на фиг. 16(a), тормозная система 100A включает в себя тормозную педаль 101, тормозной переключатель 103, которым обнаруживается нажатие тормозной педали 101, главный цилиндр 104 тандемного типа, который прикладывает тормозное гидравлическое давление в соответствии с величиной торможения, подводимой от тормозной педали 101, механический тормоз 105 и тормозную магистраль 106, по которой к механическому тормозу 105 подводится гидравлическое давление главного цилиндра 104. Механический тормоз 105 образован известным механическим тормозом, который управляется гидравлическим давлением дискового тормоза или барабанного тормоза. На тормозной магистрали 106 обеспечен механизм 107 ABS, который предотвращает блокировку соответствующих ходовых колес, когда применяются тормоза.
В этой тормозной системе 100A при остановке транспортного средства, движущегося за счет двигателя, как показано на фиг. 16(b) и 16(c), когда водитель отпускает педаль 101 акселератора, торможение двигателем достигается за счет трения двигателя, а тормозная сила создается в результате осуществления в электродвигателе 7 определенной величины рекуперации при незадействованных тормозах в момент времени. Затем, когда водитель выжимает тормозную педаль 101, тормозным переключателем 103 обнаруживается нажатие тормозной педали 101, и в электродвигателе 7 для создания тормозной силы осуществляется определенная величина, которая определена заранее, рекуперации с задействованными тормозами, и к механическому тормозу 105 подается тормозное гидравлическое давление, соответствующее величине нажатия тормозной педали 101, в результате чего механический тормоз 105 приводится в действие. Далее, когда транспортное средство замедляется до достижения заданной скорости транспортного средства Vc, рекуперативный крутящий момент электродвигателя 7 постепенно теряется. Когда транспортное средство еще замедляется до заданной скорости транспортного средства Vd, первое и второе сцепления 41, 42 (стартовые сцепления) выключаются. Наконец, транспортное средство останавливается фрикционным тормозным действием, производимым механическим тормозом 105.
Кроме того, может быть использована тормозная система 100B, показанная на фиг. 17. Как показано на фиг. 17(a), тормозная система 100B включает в себя тормозную педаль 101, тормозной переключатель 103, которым обнаруживается нажатие тормозной педали 101, главный цилиндр 104 тандемного типа, который прикладывает тормозное гидравлическое давление в соответствии с величиной торможения, подводимой от тормозной педали 101, датчик 108 давления главного цилиндра, которым обнаруживается гидравлическое давление в главном цилиндре 104, механический тормоз 105 и тормозную магистраль 106, по которой к механическому тормозу 105 подводится гидравлическое давление главного цилиндра 104. Подобно тормозной системе 100, которая была описана ранее, механический тормоз 105 образован известным механическим тормозом, который управляется гидравлическим давлением дискового тормоза или барабанного тормоза. На тормозной магистрали 106 обеспечен механизм 107 ABS, который предотвращает блокировку соответствующих ходовых колес, когда применяются тормоза.
Тормозная система 100B подобна тормозной системе 100A, которая была описана ранее. При остановке транспортного средства, движущегося за счет двигателя, как показано на фиг. 17(b) и 17(c), торможение двигателем достигается за счет трения двигателя, а тормозная сила создается в результате осуществления в электродвигателе 7 определенной величины рекуперации при незадействованных тормозах в момент времени, когда водитель отпускает педаль 101 акселератора, вследствие чего скорость транспортного средства уменьшается. Однако в этой тормозной системе 100B, когда тормозным переключателем 103 обнаруживается нажатие тормозной педали 101, в электродвигателе 7 осуществляется определенная величина рекуперации с задействованными тормозами, к которой в соответствии с давлением главного цилиндра, обнаруживаемого датчиком 108 давления главного цилиндра, добавляется заранее определенная величина рекуперации. Кроме того, к механическому тормозу 105 подается тормозное гидравлическое давление, соответствующее величине нажатия тормозной педали 101, в результате чего механический тормоз 105 приводится в действие. Далее, когда транспортное средство замедляется до достижения заданной скорости транспортного средства Vc, рекуперативный крутящий момент электродвигателя 7 постепенно теряется. Когда транспортное средство еще замедляется до заданной скорости транспортного средства Vd, первое и второе сцепления 41, 42 выключаются. Наконец, транспортное средство останавливается фрикционным тормозным действием, производимым механическим тормозом 105.
В этой тормозной системе 100B в электродвигателе 7 осуществляется определенная величина рекуперации с задействованными тормозами, к которой в соответствии с давлением главного цилиндра, обнаруживаемым датчиком 108 давления главного цилиндра, добавляется заданная величина рекуперации. Тем не менее изобретение этим не ограничивается. Поэтому вместо датчика 108 главного цилиндра может использоваться датчик хода, чтобы добавлять заданную величину рекуперации в соответствии с ходом, обнаруженным датчиком хода.
Согласно транспортной приводной системе 1 этого варианта осуществления, который был описан ранее, когда во время движения в 5-м режиме EV вследствие выбора ведущей шестерни 25a пятой скорости уменьшается скорость транспортного средства, запускается двигатель 6, второе сцепление 42 включается в таком состоянии, в котором ведущая шестерня 24a четвертой скорости выбирается вторым переключателем 52 скоростей, в то время как при помощи первого переключателя 51 скоростей осуществляется понижающее переключение с ведущей шестерни 25a пятой скорости на ведущую шестерню 23a третьей скорости при осуществлении электродвигателем 7 рекуперации, то есть во время осуществления понижающего переключения с 5-го режима EV на 3-й режим EV с рекуперацией, осуществляемой электродвигателем 7, делая тем самым возможным обеспечение тормозной силы во время понижающего переключения. Следовательно, энергию, которая традиционно выделяется в виде тепловой энергии, когда тормозная сила создается колесными тормозами, можно эффективно использовать как рекуперативную энергию. Помимо этого транспортное средство замедляется в соответствии со скоростью транспортного средства, а следовательно, при повторном ускорении транспортного средства, его можно ускорять заново плавно.
Кроме этого, когда после осуществления рекуперации на ведущей шестерне 23a третьей скорости нельзя получать требуемую рекуперацию, чтобы быть готовым для повторного ускорения, осуществляется понижающее переключение с 3-го режима EV на 1-й режим EV, обеспечивая тем самым плавное ускорение транспортного средства, когда осуществляется его повторное ускорение.
Второй вариант осуществления
Далее со ссылкой на фиг. 18 будет описана транспортная приводная система согласно второму варианту осуществления. Транспортная приводная система 1A отличается от транспортной приводной системы 1 тем, что трансмиссия 20A помимо планетарного зубчатого механизма 30 и зубчатых пар 22-25 второй-пятой скоростей включает в себя зубчатую пару 96 шестой передачи и зубчатую пару 97 седьмой передачи. В дальнейшем в этой заявке транспортная приводная система 1A будет описана, ссылаясь только на признаки, отличные от транспортной приводной системы 1, которая была описана ранее.
Ведущая шестерня 97a седьмой скорости обеспечена на первом основном валу 11, между ведущей шестерней 23a третьей скорости и ведущей шестерней 25a пятой скорости с возможностью вращения относительно первого основного вала 11. Кроме того, между ведущей шестерней 23a третьей скорости и ведущей шестерней 97a седьмой скорости обеспечен первый переключатель 51A скоростей, который выполнен с возможностью соединения первого основного вала 11 с ведущей шестерней 23a третьей скорости или ведущей шестерней 97a седьмой скорости или прекращения соединения. Между ведущей шестерней 97a седьмой скорости и ведущей шестерней 25a пятой скорости обеспечен третий переключатель 51B скоростей, который выполнен с возможностью соединения первого основного вала 11 с ведущей шестерней 25a пятой скорости или прекращения соединения. Тогда, когда первый переключатель 51A скоростей введен в соединительное положение третьей скорости, первый основной вал 11 и ведущая шестерня 23a третьей скорости соединяются, чтобы вращаться вместе. Когда первый переключатель 51A скоростей введен в соединительное положение седьмой скорости, первый основной вал 11 и ведущая шестерня 97a седьмой скорости вращаются вместе. Когда первый переключатель 51A скоростей находится в нейтральном положении, первый основной вал 11 вращается относительно ведущей шестерни 23a третьей скорости и ведущей шестерни 97a седьмой скорости. Кроме того, когда третий переключатель 51B скоростей введен в соединительное положение пятой скорости, первый основной вал 11 и ведущая шестерня 25a пятой скорости соединяются, чтобы вращаться вместе. Когда третий переключатель 51B скоростей находится в нейтральном положении, первый основной вал 11 вращается относительно ведущей шестерни 25a пятой скорости.
Ведущая шестерня 96a шестой скорости обеспечена на втором промежуточном валу 16, между ведущей шестерней 22a второй скорости и ведущей шестерней 24a четвертой скорости, с возможностью вращения относительно второго промежуточного вала 16. Кроме того, между ведущей шестерней 22a второй скорости и ведущей шестерней 96a шестой скорости обеспечен второй переключатель 52A скоростей, выполненный с возможностью соединения второго промежуточного вала 16 с ведущей шестерней 22a второй скорости или ведущей шестерней 96a четвертой скорости или прекращения соединения. Между ведущей шестерней 96a шестой скорости и ведущей шестерней 24a четвертой скорости обеспечен четвертый переключатель 52B скоростей, выполненный с возможностью соединения вместе второго промежуточного вала 16 с ведущей шестерней 24a четвертой скорости или прекращения соединения. Тогда, когда второй переключатель 52A скоростей введен в соединительное положение второй скорости, второй промежуточный вал 16 и ведущая шестерня 22a второй скорости соединяются, чтобы вращаться вместе. Когда второй переключатель 52A скоростей введен в соединительное положение шестой скорости, второй промежуточный вал 16 и ведущая шестерня 96a шестой скорости вращаются вместе. Когда второй переключатель 52A скоростей находится в нейтральном положении, второй промежуточный вал 16 вращается относительно ведущей шестерни 22a второй скорости и ведущей шестерни 96a шестой скорости. Кроме этого, когда четвертый переключатель 52B скоростей введен в соединительное положение четвертой скорости, второй промежуточный вал 16 и ведущая шестерня 24a четвертой скорости соединяются, чтобы вращаться вместе. Когда четвертый переключатель 52B скоростей находится в нейтральном положении, второй промежуточный вал 16 вращается относительно ведущей шестерни 24a четвертой скорости.
Третья общая ведомая шестерня 96b смонтирована за одно целое на передаточном валу 14, между первой общей ведомой шестерней 23b и второй общей ведомой шестерней 24b.
Здесь третья общая ведомая шестерня 96b зацепляется с ведущей шестерней 97a седьмой скорости, которая обеспечена на основном валу 11, и образует вместе с ведущей шестерней 97a седьмой скорости зубчатую пару 97 седьмой скорости, и зацепляется с ведущей шестерней 96a шестой скорости, которая обеспечена на втором промежуточном валу 16, и образует зубчатую пару 96 шестой передачи.
Движение на шестой скорости можно получить путем включения второго сцепления 42 при втором переключателе 52A скоростей, введенном в соединительное положение шестой скорости. Кроме того, движение на седьмой передаче достигается включением первого сцепления 41 при первом переключателе 51A скоростей, введенном в соединительное положение седьмой скорости. В любом из этих случаев движению транспортного средства может способствовать электродвигатель 7, или электродвигатель 7 может заряжать аккумулятор.
В транспортной приводной системе 1A, выполненной, как описано ранее, транспортное средство в дополнение к 1-му режиму EV, 3-му режиму EV и 5-му режиму EV может двигаться в 7-м режиме EV.
Конкретнее, 7-й режим EV достигается перемещением первого переключателя 51A скоростей из нейтрального положения и введения его в соединительное положение седьмой скорости.
Когда в этом состоянии приводится электродвигатель 7 (крутящий момент прикладывается в направлении вращения вперед), солнечная шестерня 32 планетарного зубчатого механизма 30, которая соединена с ротором 72, вращается в направлении вращения вперед. Когда это происходит, то, поскольку первое и второе сцепления 41, 42 выключены, мощность, передаваемая на солнечную шестерню 32, не передается от первого основного вала 11 к коленчатому валу 6a двигателя 6, но крутящий момент электродвигателя передается к приводным колесам DW, DW посредством седьмой зубчатой пары 97.
Когда транспортное средство, движущееся в 7-м режиме EV, замедляется, то, как и при понижающем переключении с 5-го режима EV на 3-й режим EV, тормозная сила во время понижающего переключения с 7-го режима EV на 5-й режим EV может обеспечиваться согласованным управлением колесными тормозами B1-B4.
А именно рекуперация осуществляется в 7-м режиме с отпущенной (OFF) педалью акселератора, не показана. Тогда, когда скорость транспортного средства снижается до заданного значения, рекуперативный крутящий момент электродвигателя 7 постепенно теряется, и в то же время согласованно приводятся в действие колесные тормоза B1-B4 тормозной системы 100, чтобы постепенно увеличивать тормозную силу, которая должна производиться посредством этого, для поддержания заданной тормозной силы. Затем, в состоянии, в котором рекуперативный крутящий момент полностью потерян, первый переключатель 51A скоростей возвращается из соединительного положения седьмой скорости в нейтральное положение, тогда как третий переключатель 51B скоростей перемещается из нейтрального положения для введения в соединительное положение пятой скорости. После этого рекуперативный крутящий момент электродвигателя 7 постепенно увеличивается, и рекуперация осуществляется в 5-м режиме EV. В то же время для поддержания заданной тормозной силы осуществляется согласованное управление колесными тормозами B1-B4 тормозной системы 100, чтобы тем самым постепенно сокращать производимую тормозную силу. После того как рекуперативная тормозная сила электродвигателя 7 в 5-м режиме EV достигает заданной тормозной силы, тормозная сила, производимая колесными тормозами B1-B4 тормозной системы 100, прерывается, и рекуперация продолжается в 5-м режиме EV. Когда скорость транспортного средства еще снижается до заданного значения, осуществляется понижающее переключение с 5-го режима EV на 3-й режим EV.
Таким образом, как было описано до этого момента, согласно транспортной приводной системе 1A этого варианта осуществления, когда транспортное средство, движущееся в 7-м режиме EV вследствие выбора ведущей шестерни 97a седьмой скорости, замедляется, пока электродвигателем 7 осуществляется рекуперация, в то время как при помощи первого переключателя 51A скоростей и третьего переключателя 51B скоростей осуществляется понижающее переключение с ведущей шестерни 97a седьмой скорости на ведущую шестерню 25a пятой скорости, согласованно приводятся в действие колесные тормоза B1-B4 тормозной системы 100, чтобы компенсировать уменьшение рекуперативной тормозной силы электродвигателя 7, то есть во время осуществления понижающего переключения с 7-го режима EV на 5-й режим EV, пока электродвигателем 7 осуществляется рекуперация, делая тем самым возможным обеспечение тормозной силы во время понижающего переключения.
Кроме этого согласованное управление колесными тормозами B1-B4 тормозной системы 100 осуществляется, когда осуществляется понижающее переключение с 5-го режима EV на 3-й режим EV, чтобы компенсировать снижение рекуперативной тормозной силы электродвигателя 7, пока наряду с дальнейшим замедлением транспортного средства электродвигателем 7 осуществляется рекуперация, делая тем самым возможным обеспечение тормозной силы во время понижающего переключения.
Следовательно, энергию, которая традиционно выделяется в виде тепловой энергии, когда тормозная сила создается колесными тормозами, можно эффективно использовать как рекуперативную энергию.
Кроме этого, когда замедляется транспортное средство, движущееся в 7-м режиме EV, тормозная сила может обеспечиваться использованием во время понижающего переключения с 7-го режима EV на 5-й режим EV торможения двигателем.
А именно рекуперация осуществляется в 7-м режиме EV в состоянии, в котором во время движения EV в 7-м режиме EV педаль акселератора, не показана, отпущена (OFF). Тогда, когда скорость транспортного средства снижается до заданного значения, первое сцепление 41 включается для запуска двигателя 6, в то время как рекуперация продолжается. После того как двигатель 6 запущен, первое сцепление 41 выключается, и в то же время второй переключатель 52A скоростей перемещается из нейтрального положения для введения в соединительное положение шестой скорости. Далее постепенно включается второе сцепление 42, чтобы применять торможение двигателем. Затем, после того, как второе сцепление 42 полностью включено, первый переключатель 51A скоростей перемещается обратно из соединительного положения седьмой скорости в нейтральное положение, и в то же время третий переключатель 51B скоростей перемещается из нейтрального положения для введения в соединительное положение пятой скорости, чтобы осуществлять тем самым понижающее переключение. После этого рекуперация осуществляется в 5-м режиме EV, а второе сцепление 42, которое включено, постепенно выключается. Потом, после того как второе сцепление 42 полностью выключено, двигатель 6 останавливается. Когда скорость транспортного средства снижается еще больше до заданного значения, осуществляется понижающее переключение с 5-го режима EV на 3-й режим EV.
Таким образом, как было описано до этого момента, согласно транспортной приводной системе 1A этого варианта осуществления, когда транспортное средство, движущееся в 7-м режиме EV вследствие выбора ведущей шестерни 97a седьмой скорости, замедляется, запускается двигатель 6, а второе сцепление 42 включается в состоянии, в котором вторым переключателем 52A скоростей выбирается ведущая шестерня 96a шестой скорости, в то время как при помощи первого переключателя 51A скоростей и третьего переключателя 51B скоростей осуществляется понижающее переключение с ведущей шестерни 97a седьмой скорости на ведущую шестерню 25a пятой скорости при осуществлении рекуперации электродвигателем 7, то есть во время осуществления понижающего переключения с 7-го режима EV на 5-й режим EV, пока электродвигателем 7 осуществляется рекуперация, делая тем самым возможным обеспечение тормозной силы во время понижающего переключения путем использования последствий торможения двигателем.
Помимо этого запускается двигатель 6, и второе сцепление 42 включается в состоянии, в котором ведущая шестерня 24a четвертой скорости выбирается с использованием четвертого переключателя 52B скоростей, в то время как осуществляется понижающее переключение с 5-го режима EV на 3-й режим EV, пока наряду с дальнейшим замедлением транспортного средства электродвигателем 7 осуществляется рекуперация, делая тем самым обеспечение тормозной силы во время понижающего переключения.
Следовательно, в транспортной приводной системе 1A этого варианта осуществления энергию, которая традиционно выделяется в виде тепловой энергии, когда тормозная сила создается колесными тормозами, тоже можно эффективно использовать как рекуперативную энергию.
Изобретение не ограничено вариантами осуществления, которые были описаны до настоящего момента, а может быть модифицировано или улучшено, как необходимо.
Перечень ссылочных позиций и символов
1, 1A - приводная система; 6 - двигатель (двигатель внутреннего сгорания); 6a - коленчатый вал (выходной вал двигателя внутреннего сгорания); 7 - электродвигатель (электродвигатель); 9 - приводной вал; 11 - первый основной вал (первый входной вал); 12 - второй основной вал; 13 - соединительный вал; 14 - передаточный вал (выходной/входной вал); 15 - первый промежуточный вал; 16 - второй промежуточный вал (второй входной вал); 20, 20A - трансмиссия; 22 - зубчатая пара второй скорости; 22a - ведущая шестерня второй скорости; 23 - зубчатая пара третьей скорости; 23a - ведущая шестерня третьей скорости; 23b - первая общая ведомая шестерня; 24 - зубчатая пара четвертой скорости; 24a - ведущая шестерня четвертой скорости; 24b - вторая общая ведомая шестерня; 25 - зубчатая пара пятой скорости; 25a - ведущая шестерня пятой скорости; 26a - последняя шестерня; 27A - первая промежуточная зубчатая передача; 27B - вторая промежуточная зубчатая передача; 27a - промежуточная ведущая шестерня; 27b - первая промежуточная ведомая шестерня; 27c - вторая промежуточная ведомая шестерня; 27d - третья промежуточная ведомая шестерня; 30 - планетарный зубчатый механизм; 32 - солнечная шестерня (первый элемент); 35 - коронная шестерня (третий элемент); 36 - водило (второй элемент); 41 - первое сцепление (первый соединяющий и разъединяющий блок); 42 - второе сцепление (второй соединяющий и разъединяющий блок); 51, 51A - первый переключатель скоростей (первый блок переключения); 52, 52A - второй переключатель скоростей (второй блок переключения); 52B - четвертый переключатель скоростей (второй блок переключения); 53 - переключатель заднего хода; 61 - блокировочный механизм (первый блок переключения); 96 - зубчатая пара шестой скорости, 96a - ведущая шестерня шестой скорости; 96b - третья общая ведомая шестерня; 97 - зубчатая пара седьмой скорости; 97a - ведущая шестерня седьмой скорости; 100 - тормозная система; 111 - тормозная педаль; B1-B4 - колесный тормоз; M - главный цилиндр.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНАЯ СИСТЕМА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2534465C2 |
| БЛОК УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2542849C1 |
| СИСТЕМА ПРИВОДА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2531540C2 |
| СИЛОВАЯ ПЕРЕДАЧА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2483941C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2619484C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2540197C1 |
| Устройство управления для транспортного средства с электрическим приводом | 2016 |
|
RU2655575C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ЧАСТОТЫ ВРАЩЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2719836C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| МОДУЛЬ И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2533954C2 |
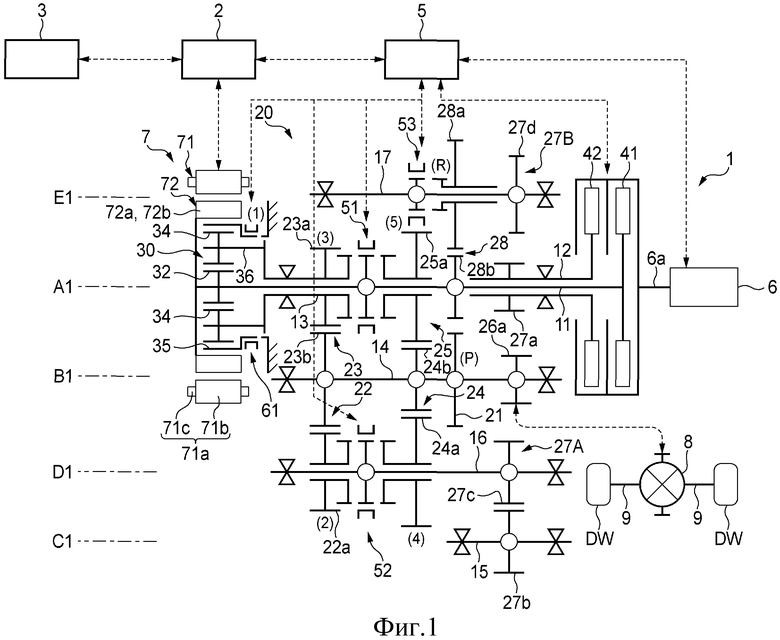
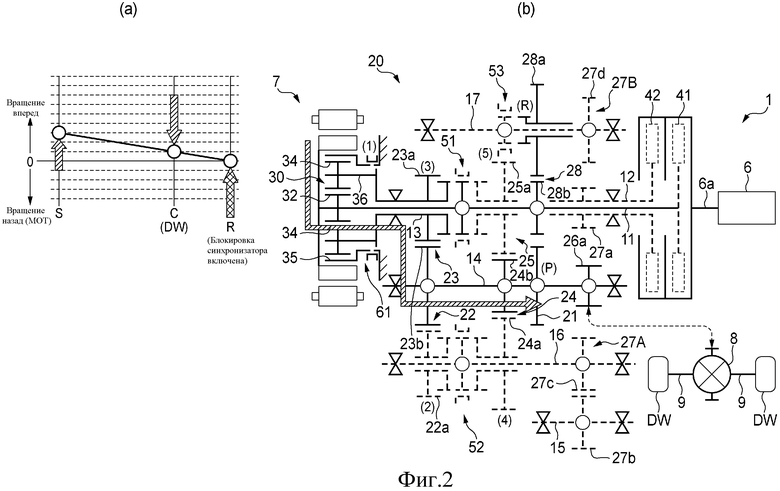
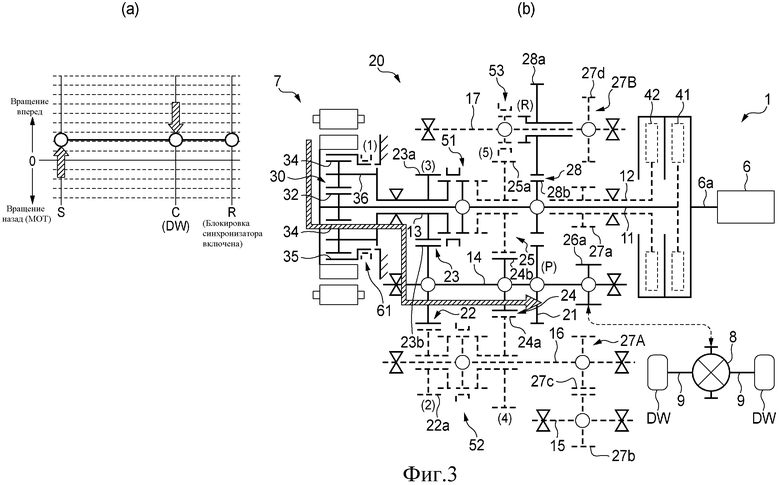
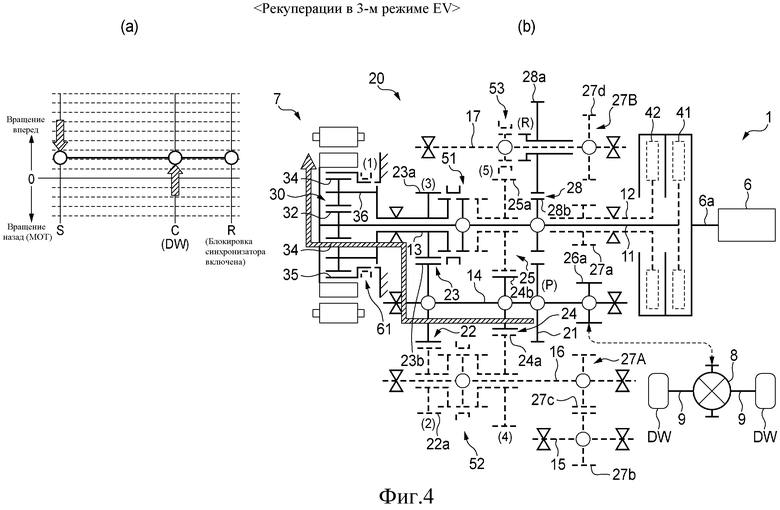

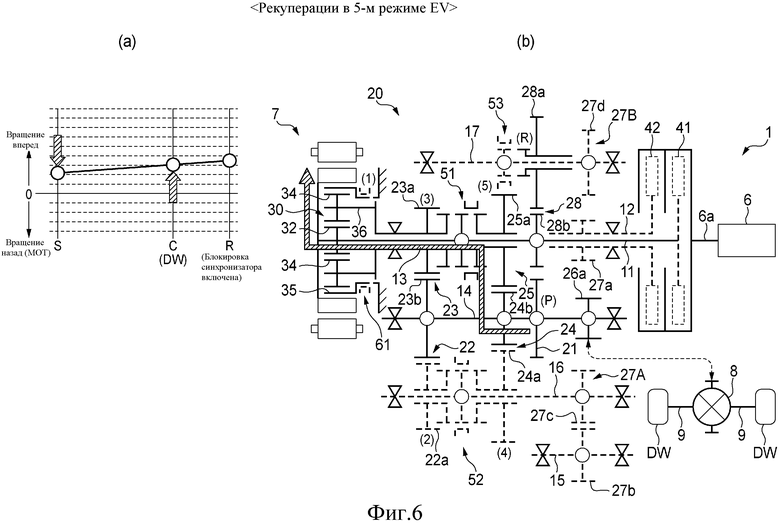
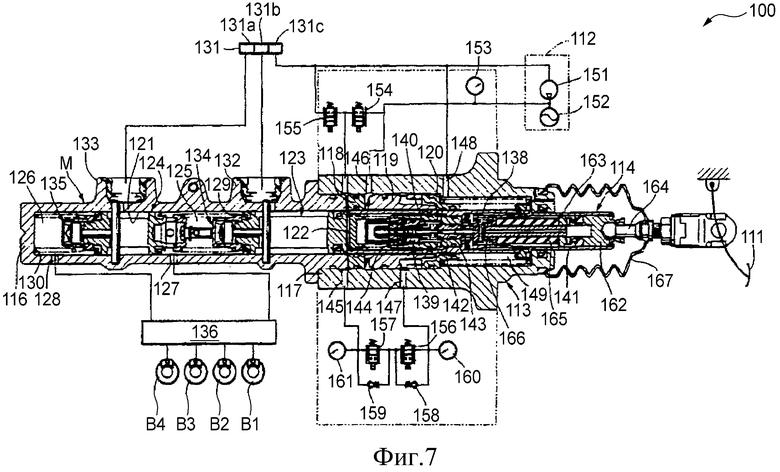
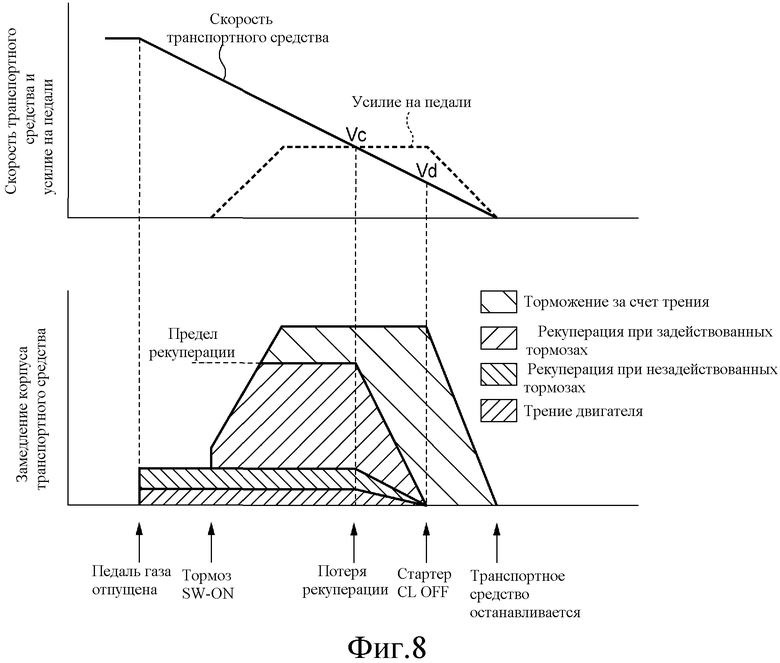
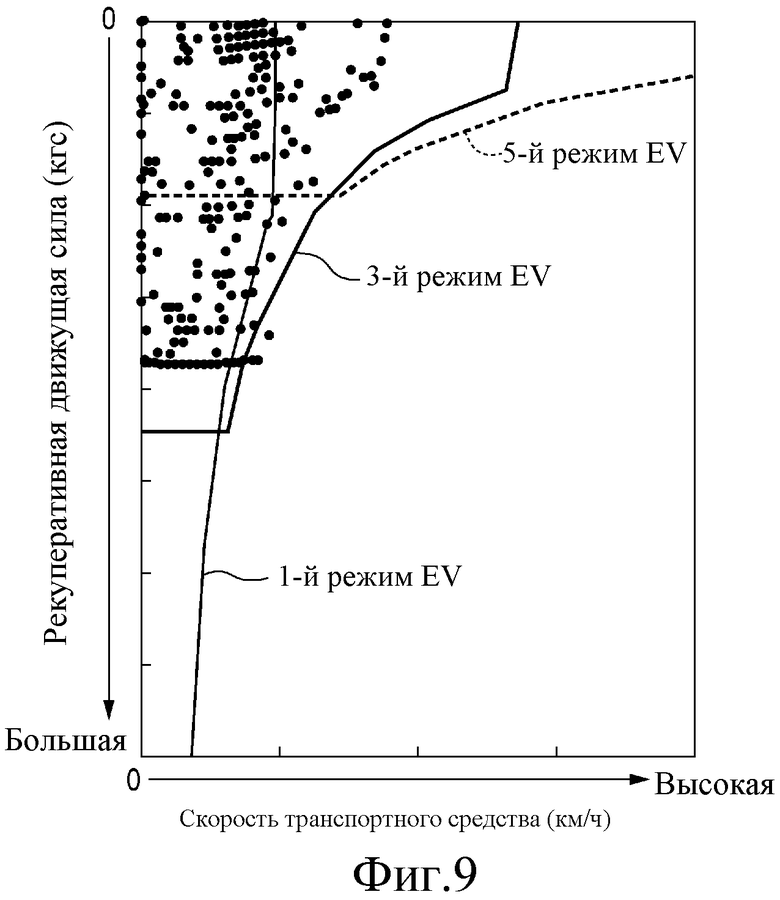
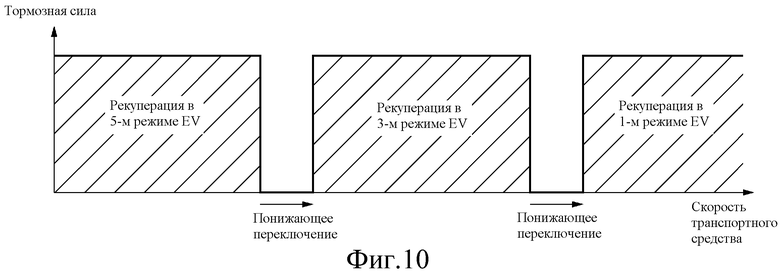
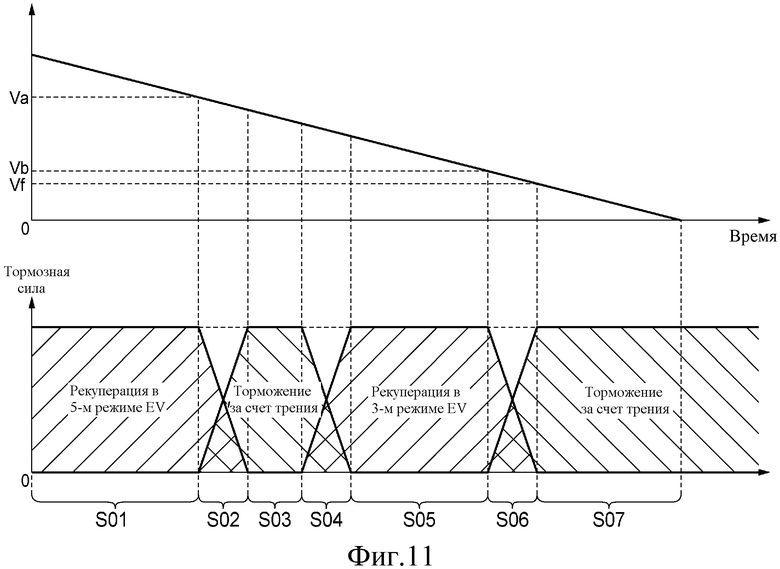
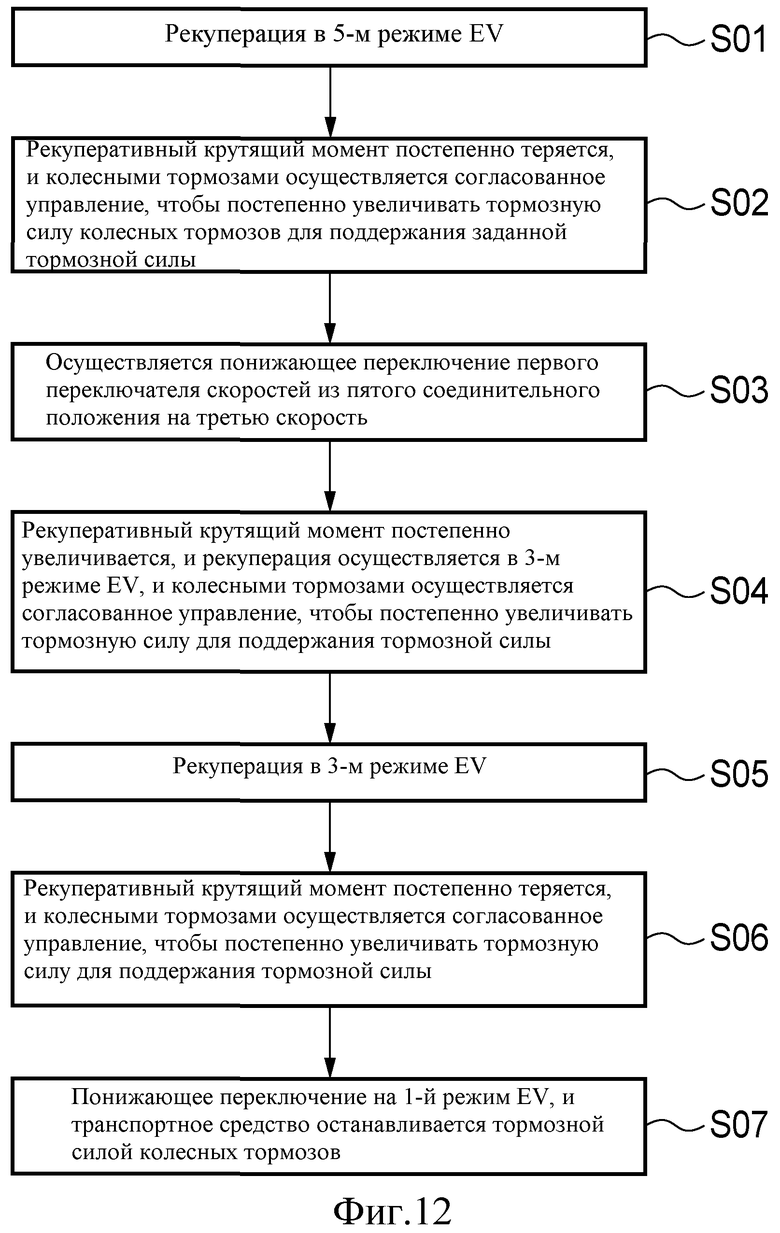
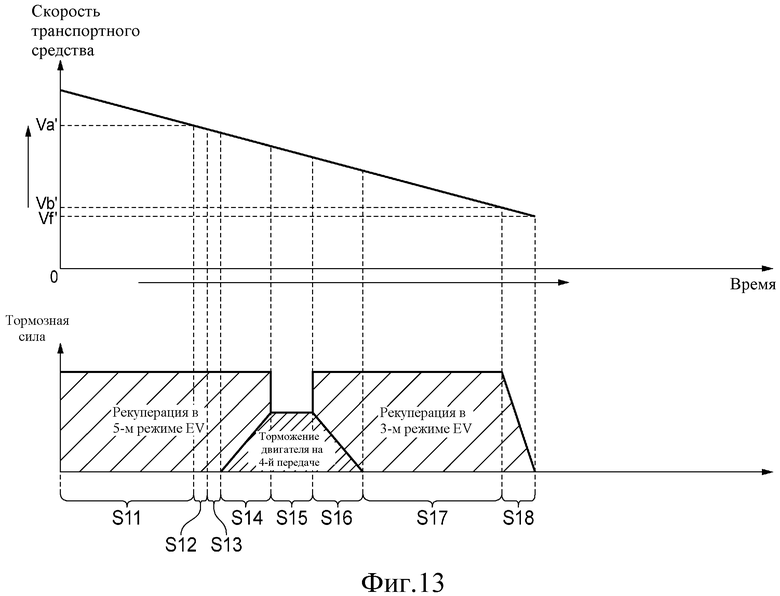
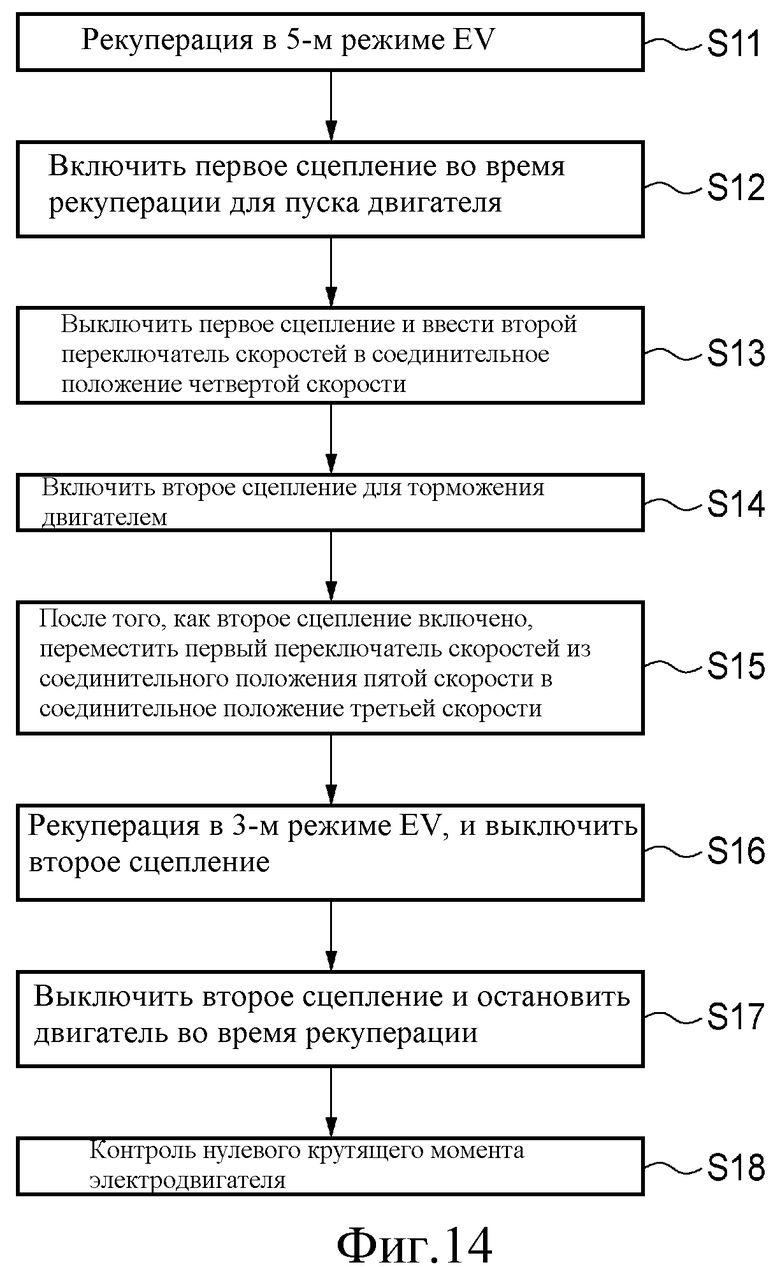
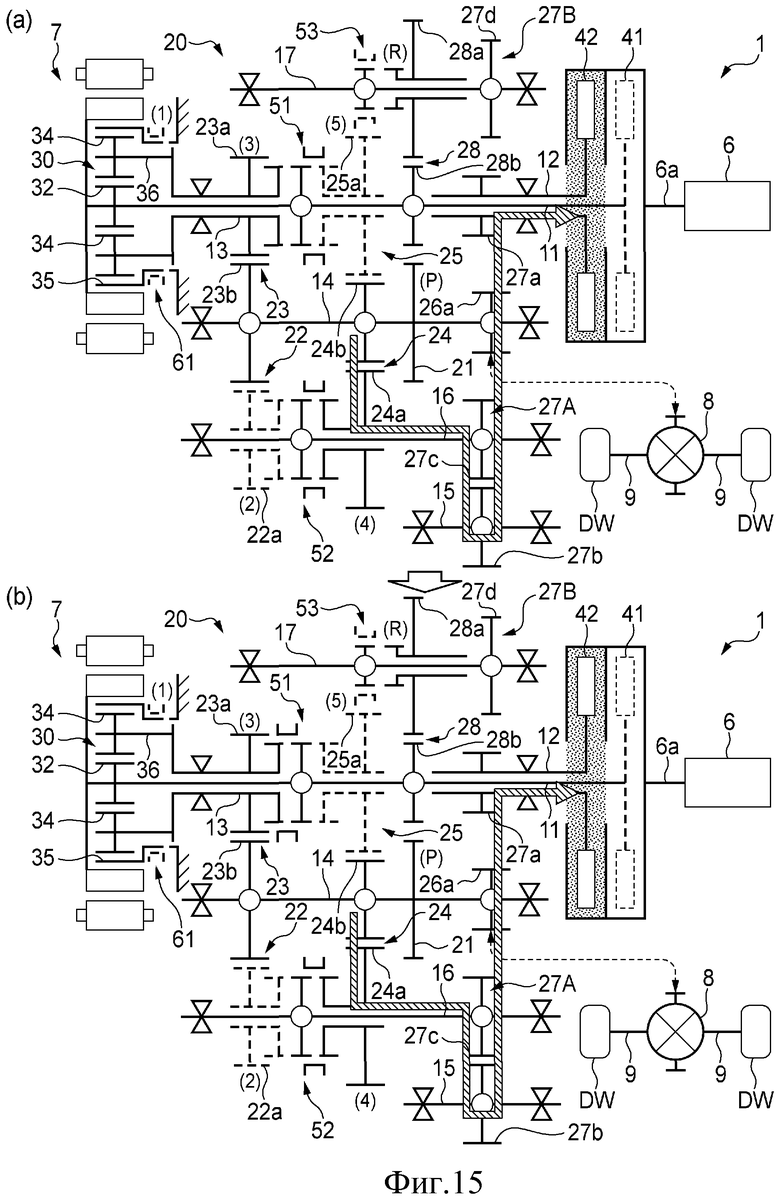
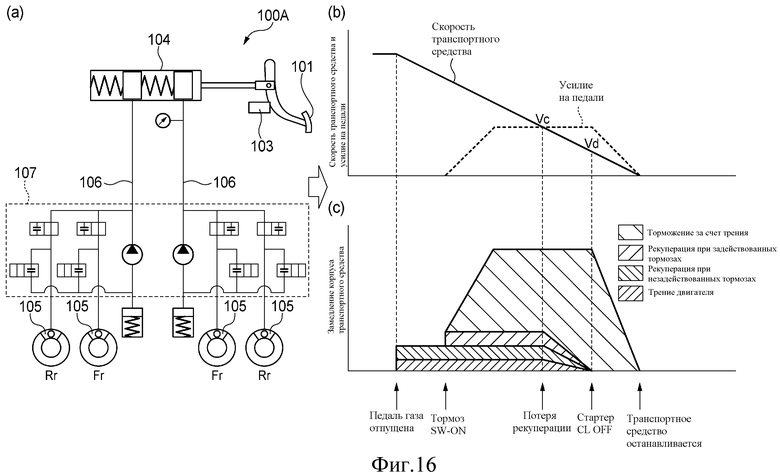
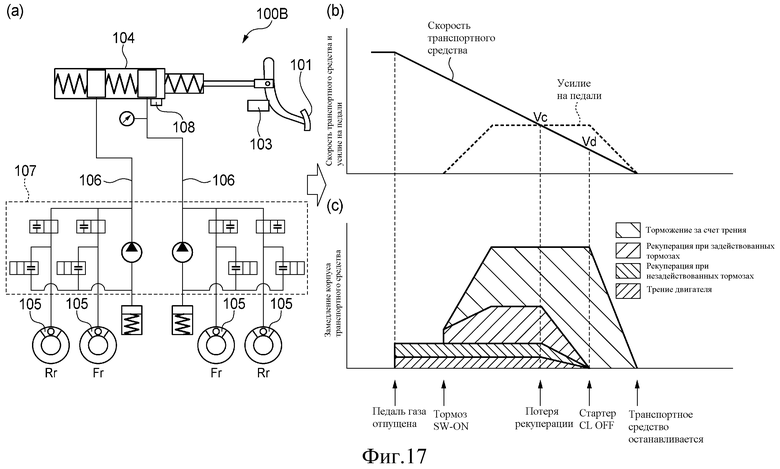
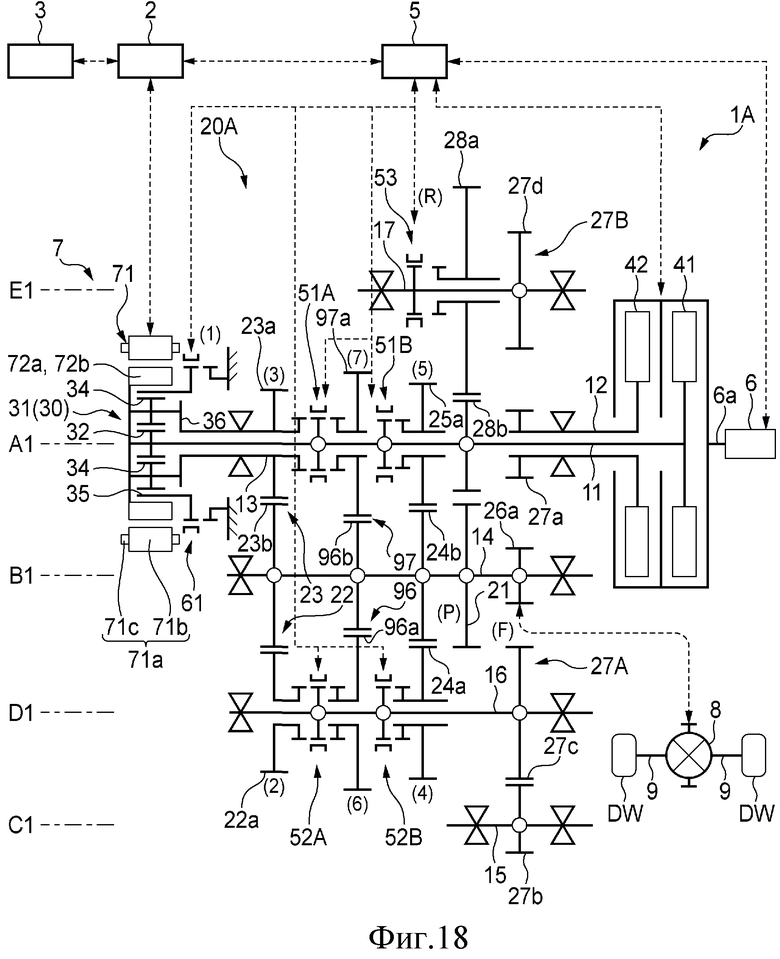
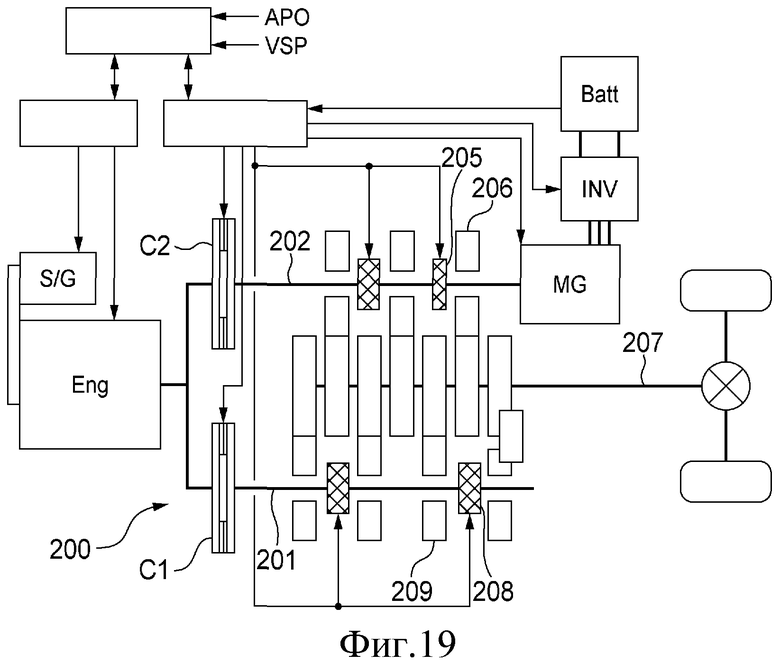
Группа изобретений относится к приводной системе для транспортного средства. Приводная система по первому и второму вариантам содержит двигатель внутреннего сгорания, электродвигатель, первый входной вал, второй входной вал, выходной/входной вал, первый, второй и третий наборы шестерен. Первый, второй входные валы и выходной/входной вал расположены параллельно выходному валу двигателя внутреннего сгорания. Выходной/входной вал выводит мощность на ведомую часть. Первый набор шестерен расположен на первом входном валу. Второй набор шестерен расположен на втором входном валу. Третий набор шестерен расположен на выходном/входном валу. В приводной системе по первому варианту при замедлении транспортного средства во время движения в режиме электромобиля при включении понижающей передачи тормозная сила обеспечивается путем согласованного приведения в действие колесных тормозов, в то время как рекуперация осуществляется электродвигателем. В приводной системе по второму варианту при замедлении транспортного средства во время движения в режиме электромобиля тормозная сила при включении понижающей передачи обеспечивается, извлекая пользу из последствий торможения двигателем. Причем во время понижающего переключения передачи с шестерни для высоких оборотов первого набора шестерен на шестерню для малых оборотов первого набора шестерен запускается двигатель внутреннего сгорания и одна из шестерен второго набора шестерен выбирается вторым блоком переключения, в то время как рекуперация осуществляется электродвигателем. Технический результат заключается в эффективном использовании режима рекуперации при движении транспортного средства за счет электродвигателя. 2 н. и 6 з.п. ф-лы, 19 ил.
1. Приводная система для транспортного средства, содержащая двигатель внутреннего сгорания и электродвигатель, при этом система содержит выходной вал двигателя внутреннего сгорания, при помощи которого выводится мощность от двигателя внутреннего сгорания, первый входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяется с выходным валом двигателя внутреннего сгорания с помощью первого соединяющего и разъединяющего блока, второй входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяется с выходным валом двигателя внутреннего сгорания с помощью второго соединяющего и разъединяющего блока, выходной/входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания и который выводит мощность на ведомую часть, первый набор шестерен, который расположен на первом входном валу и который включает в себя множество шестерен, которые выборочно соединяются с первым входным валом посредством первого блока переключения, второй набор шестерен, который расположен на втором входном валу и который включает в себя множество шестерен, которые выборочно соединяются со вторым входным валом посредством второго блока переключения, и третий набор шестерен, который расположен на выходном/входном валу и который включает в себя множество шестерен, с которыми зацепляются шестерни первого набора шестерен и шестерни второго набора шестерен, при этом, когда транспортное средство замедляется во время движения в режиме электромобиля вследствие выбора шестерни для высоких оборотов из первого набора шестерен, во время включения понижающей передачи тормозная сила обеспечивается путем согласованного приведения в действие колесных тормозов, чтобы компенсировать снижение рекуперативной тормозной силы электродвигателя во время понижающего изменения передачи с шестерни для высоких оборотов первого набора шестерен на шестерню для малых оборотов первого набора шестерен, в то время как рекуперация осуществляется электродвигателем.
2. Система по п.1, в которой первым блоком переключения является синхронизирующая муфта.
3. Система по п.1, в которой, когда скорость транспортного средства уменьшается до заданного значения вследствие осуществления рекуперации после выбора шестерни для малых оборотов, рекуперация останавливается, и выбирается более низкая шестерня для малых оборотов, чем упомянутая шестерня для малых оборотов.
4. Система по п.1, в которой величина рекуперации может быть увеличена в соответствии с усилием на педали, прикладываемым к тормозной педали, а тормозная сила обеспечивается путем управления гидравлическим давлением главного цилиндра в первый раз после того, как величина рекуперации достигает предела рекуперации.
5. Приводная система для транспортного средства, содержащая двигатель внутреннего сгорания и электродвигатель, при этом система содержит выходной вал двигателя внутреннего сгорания, при помощи которого выводится мощность от двигателя внутреннего сгорания, первый входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяется с выходным валом двигателя внутреннего сгорания с помощью первого соединяющего и разъединяющего блока, второй входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания и который выборочно соединяется с выходным валом двигателя внутреннего сгорания с помощью второго соединяющего и разъединяющего блока, выходной/входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания и который выводит мощность на ведомую часть, первый набор шестерен, который расположен на первом входном валу и который включает в себя множество шестерен, которые выборочно соединяются с первым входным валом посредством первого блока переключения, второй набор шестерен, который расположен на втором входном валу и который включает в себя множество шестерен, которые выборочно соединяются со вторым входным валом посредством второго блока переключения, и третий набор шестерен, который расположен на выходном/входном валу и который включает в себя множество шестерен, с которыми зацепляются шестерни первого набора шестерен и шестерни второго набора шестерен, при этом, когда транспортное средство замедляется во время движения в режиме электромобиля вследствие выбора шестерни для высоких оборотов из первого набора шестерен, тормозная сила во время включения понижающей передачи обеспечивается, извлекая пользу из последствий торможения двигателем, путем зацепления второго соединяющего и разъединяющего блока в таком состоянии, что во время понижающего переключения передачи с шестерни для высоких оборотов первого набора шестерен на шестерню для малых оборотов первого набора шестерен запускается двигатель внутреннего сгорания, и одна из шестерен второго набора шестерен выбирается вторым блоком переключения, в то время как рекуперация осуществляется электродвигателем.
6. Система по п.5, в которой система оценивает запрос на замедление, причем, когда делается запрос на замедление на шестерню для малых оборотов из первого набора шестерен, в то время как рекуперация осуществляется шестерней для высоких оборотов из первого набора шестерен, торможение двигателем достигается в таком состоянии, когда выбирается шестерня из второго набора шестерен, и выполняется предварительное включение понижающей передачи с шестерни для высоких оборотов на шестерню для малых оборотов из первого набора шестерен, в то время как транспортное средство движется за счет шестерни из второго набора шестерен.
7. Система по п.5, в которой первым блоком переключения является синхронизирующая муфта.
8. Система по п.5, в которой, когда скорость транспортного средства уменьшается до заданного значения вследствие осуществления рекуперации после выбора шестерни для малых оборотов, рекуперация останавливается, и выбирается более низкая шестерня для малых оборотов, чем упомянутая шестерня для малых оборотов.
| СПОСОБ КОНСЕРВАЦИИ ТОПЛИВОРЕГУЛИРУЮЩЕЙ СИСТЕМЫ | 1981 |
|
RU2067680C1 |
| JP 2007534899 A, 29.11.2007 | |||
| JP 2002095106 A, 29.03.2002 | |||
| EP 0758591 A1, 19.02.1997 | |||
| СПОСОБ РАБОТЫ КОМБИНИРОВАННОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1998 |
|
RU2223183C2 |

