(5) СПИРОИДНОЕ ЗАЦЕПЛЕНИЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИЛИНДРИЧЕСКАЯ СПИРОИДНАЯ ФРЕЗА | 1996 |
|
RU2095204C1 |
| Способ нарезания зубьев колеса червячной цилиндрической передачи | 1983 |
|
SU1117158A1 |
| Способ изготовления червячной передачи | 1979 |
|
SU837636A1 |
| Червячная передача с локализованнымпяТНОМ KOHTAKTA | 1979 |
|
SU802678A1 |
| Червячный инструмент | 1980 |
|
SU931334A1 |
| Способ образования червячной передачи с локализованным контактом | 1981 |
|
SU963742A1 |
| БЕЗЗАЗОРНАЯ ЧЕРВЯЧНАЯ ПЕРЕДАЧА И СПОСОБ НАРЕЗАНИЯ ЗУБЬЕВ ЧЕРВЯЧНОГО КОЛЕСА БЕЗЗАЗОРНОЙ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ | 2005 |
|
RU2291337C1 |
| Цилиндрическая спироидная фреза | 1985 |
|
SU1348099A1 |
| ОРТОГОНАЛЬНАЯ ДВУХМОДУЛЬНАЯ ЧЕРВЯЧНАЯ ПЕРЕДАЧА | 1999 |
|
RU2159370C2 |
| Способ изготовления колеса модифицированной глобоидной передачи | 1986 |
|
SU1328092A1 |
I
Изобретение относится к машиностроению и может быть использовано в силовых спироидных передачах.
Известна пространственная зубчатая передача, содержащая конический червяк ц тарельчатое колесо, вершина конуса червяка направлена от плоскости, определяемой линией пересечения и осью тарельчатого колеса ЕП.
Недостатком известной передачи является ее малая технологичность.
Наиболее близким к изобретению :по технической сущности и достигаемому результату является спироидное зацепление одновенцового плоского колеса с рабочим червяком, в котором активные поверхности зубьев колеса взаимоогибаемы с витками производящего червяка и имеют локализованный контакт с витками рабочего червяка, расположенного основным образом относительно колеса. Производящий червяк выполнен с делительным
диаметром, равным делительному диаметру рабочего червяка 2.
Недостатком данного зацепления является ограниченная технологичность изготовления реальной передачи.
Цель изобретения - повышение технологичности изготовления реальной передачи.
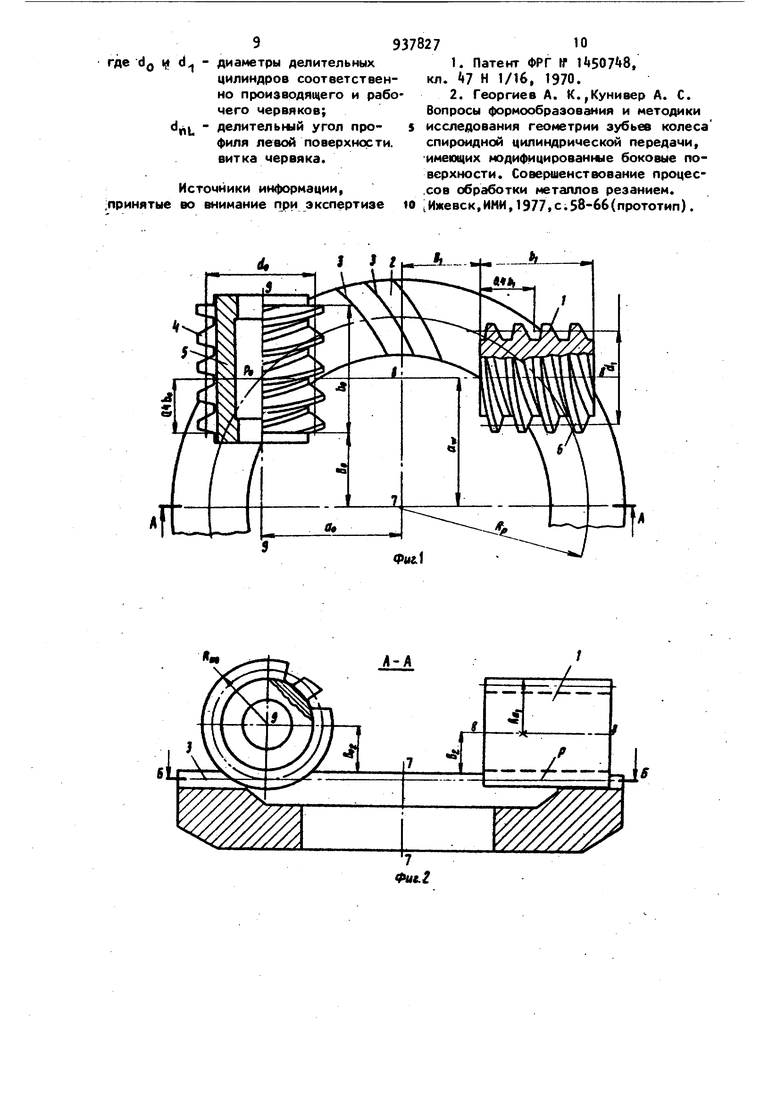
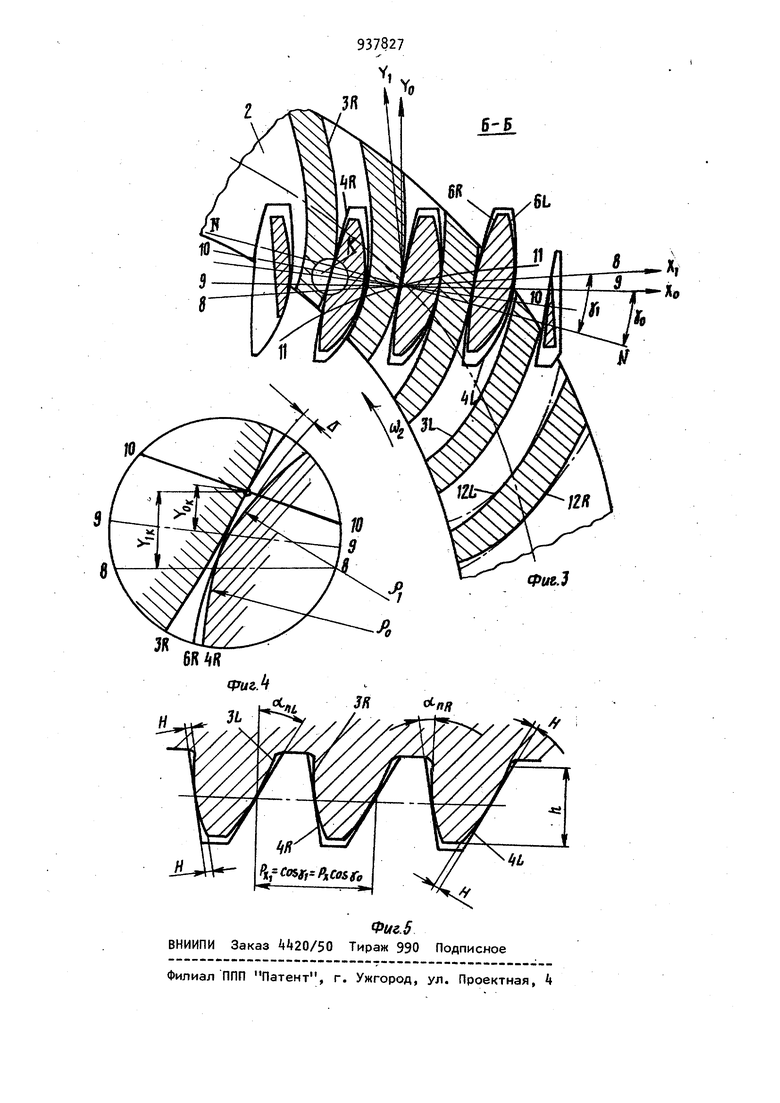
Указанная цель обеспечивается в спироидном зацеплении одновенцового плоского колеса с рабочим червяком, в котором активные поверхности зубьев колеса взаимоогибаемы с витками производящего червяка и имеют локализованный контакт с витками рабочего червяка, расположенного основным образом относительно колеса, производящий червяк выполнен цилиндрическим с нормальным шагом, равным нормальному шагу рабочего червяка, и делительным диаметром, большим делительного диаметра рабочего чярвяка в 1.1391 Л,раза, и станочное межосевое рас.стояние ар выбрано из условия .co3(VVfob гдеЛр м pz сиге радиус и угол расположения центра локализованного пятна контакта; межосевое расстояние передачи; делительные УГЛЫ подъема соответственно производящего и рабоОтношение диаметров яетгельн ° цилиндров рабочего и производящего червяков выбрано равным 3i . ЦУ1 где d. - диаметры дели тел ьных цилиндров соответст венно производящего и рабочего червяков; cL ( - делительный угол профиля левой поверх ности витка червяка. На фиг. 1 показано спироидное зацепление вдоль оси спироидного колеса; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - совмещенный разрез Б-Б на фиг. 2; на -фиг. А окрестность точки К на фиг. 3 в увеличенном масштабе; на.фиг, 5 сечение рабочего и производящёго червяко по линии N-N на фиг. 3. Спироидное зацепление включает одновенцовую цилиндрическую спироидную передачу, которая состоит из цилиндрического рабочего червяка 1 и плоского спироидного колеса 2, зубья 3 ютт орого выполнены взаимоогибаемыми с витками цилиндрического произ водящего червяка 5. Линии витков 6 рабочего червяка 1 имеют то же (на фигурах правое) направление, что и витки производящего червяка 5. Оба червяка расположены относительно колеса основным образом, т.е. так что при взгляде со стороны зубьев 3 в направлении от оси колеса червяк располагается справа от межосевой ли нии 7-8 или соответственно 7-974Взаимное расположение рабочего . червяка и колеса характеризуется межосевым расстоянием а, удалением спироидного червяка от межосевой лиг НИИ В-, и удалением спироидного ко леса В fj, Аналогично положение производящего червяка относительно колеса характеризуется станочным межосевым расстоянием aQ и удалениями В и В (фиг. 1 и 2). Делительный диаметр d рабочего червяка выполнен ё 1,1-1,t раза меньше делительного диаметра d произюэдящего червяка. При этом геометрические параметры рабочего червяка должны быть выбраны из условия его сопряженности с той же воображаемой зубчатой рейкой, с которой сопряжен производящий червяк, т.е. осевые ходы витков Рабочего и РХО производящего червяков должны быть связаны условием, равенства их проекций на плоскость, нормальную делительной линии витка i PxHCOSy sPxoCOSTo где и (, - делительные углы подъема витков. Подст,авляя в (1) известное выраже-, ние для осевого хода через диаметр червяка и соответствующий угол подъема витка (T, (1). получаем непосредственную зависимость между углами У: To - ..(b} Кроме того, дблжны быть равны межДУ собой делительные углы профиля d нормальном сечении N-N витков рабочего и производящего червяков, а делительные углы профиля d-x в осевом сечении червяков должны быть связаны, выражением../. у Ц хо-соз t При этом с целью локализации пятна контакта по высоте зуба колеса профиль витка 6 рабочего червяка может быть выполнен с завалом К головке и можке витка по отношению к профилю витка k производящего червяка (фиг. 5).Фиг. 5 регламентирует только относительное расположение профилей, которое может быть достигнуто как приданием выпуклости профилю рабочего червяка, так и приданием вогнутости профилю производящего червяка. Величину Н профильного завала следует назначать в зависимости от допусков на форму профиля на угол скрещивания осей звеньев в пределах 0,005-0,01 высоты h витка. Относительно колеса рабочий червяк расположен таким образом, чтобы в 1|ентре Р локализованного пятна контакта делительные линии витка рабочего и производящего червяков каса лись одна другой. При этом из просты геометрических соображений имеем ра,венства . c «Rp co9 arcco3(aj, ) ). ( где RP - радиус окружности колеса, проходящей через точку Р. В качестве центра Р локализованно го пятна контакта целесообразно принимать точку, расположенную на пересечении делительного цилиндра колеса с так называемой осью зацепления, ко торая пересекает ось червяка под углом, равным углу у Подъема витка на начальном цилиндре, и межосевую линию под прямым углом. В этом случае радиус колеса в точке Р определяется выражением . йр--Ус 5,Чо.), где -U -PXи - передаточное число передачи. В случае, если основные геометрические параметры передачи рассчитываются по методике, изложенной в проекте ГОСТа. ПГ Передачи спироидные цилиндрические. Расчет геометрии, радиус центра пятна локализованного контакта может быть подсчитан по формуле yaVl8,o,4l3ji,(8) где В - удаление спироидного червяка Ц - длина его нарезанной части, Максимально допустимое удаление BQ производящего червяка и минимальная потребная длина BQ его нарезанной части определяется из того уелоВИЯ, что в сечении плоскостью вершин зубьев спироидного колеса производящий червяк доджен охватывать рабочий. Это условие может быть приведено к виду eo sv Mri-roh( )-. toHV.;w5 Г,-Го}-во-К-1/«а,ЧХ 1 ( где Rq радиус вершин витков рабочего колеса. Зацепление работает следующим об.разом. При вращении производящего червяка 5 с угловой с корысть ЮН) 5 поверхности его витков воспроизводят как свои огибающие боковые поверхности зубьев 3 колеса 2, вращающегося с угловой скорсотью Шп. Сечение плос g,g перпен дикулярной оси ко касательной к делительному цилиндру червяка, точка касания К правых взаимоогибаемых поверхностей зя зуба и kR витка перемещается по линии зацепления 10-10; аналогично точка касания леШ)1х поверхностей 31и kL перемещаеуся по линии 11-11 (фиг„ 3).Окрестность точки касания показана на фиг. . Как видно (фиг. ), в предложенной передаче боковая поверхность ЦК рабочего червяка при его вращении с угловой скоростью tio u)5 отстает от поверхности 3R зуба в его номинальном положении на величину Д, которая и представляет собой продольный,завал. Величина продольного завала измеряется в направлении, перпендИкулярном линии зуба, и с достаточной для практических расчетов точностью моет быть определена выражением де У - координата точки касания в системе координат, ось ) которой параллельна оси производящего червяка, а начало расположено в центре Р локализованного пятна контакта; . . (fi-ToJ- ot () - ордината той же точки в системе, ось Х которой параллельна оси . рабочего червяка; o,5ol -ctep i и p/03doCt«jA - радиусы кривизны поверхности соответственно рабочего и про изводящего червяков в сечении делительно плоскостью колеса. Используемые в выражении (11) кот ординаты Х(з и YQ определяются известными методами теории зацеплений. Отметим, что точка Р будет центро локализованного пятна контакта только в том случае, если определяемая выражением (11) величина д продольного завала будет неотрицательна в произвольной точке касания. Легко видеть, что для правой стороны витка, т.е. на линии зацепления 10-10, это условие выполняется автоматически, а для левой стороны сводится к условию неотрицательности выражения (11) в дифференциальной окрестности точки Р. После преобразований это условие приводится к виду ,1-4«l-ot clnL, . W Знак равенства в выражении (12) соответствует оптимальному значению di отношения do. Линиями 12L, 12R (фиг. З) показаны поверхности, взаимоогибаемые с поверхностями 6L, 6R витков рабочего червяка, линии 3L 3R реальной поверхности зуба колеса касаются линий 12 на окружности радиуса Rp и постепенно отклоняются от них внутрь тела зуба по направлению к его внешнему и внутреннему то{)цам. Такое преднамеренное отклонение позволяет в значительной мере устранить отрица тельное влияние неизбежных погрешностей изготовления и сборки, таких как ошибка осевого шага червяка и отклонение межосевого расстояния передачи, а также эквивалентных им силовых и температурных деформаций звеньев. Сокращение времени приработки, ус ранение вероятности кромочного (по внутренней и внешней кромкам зуба) контакта, плавный вход зубьев в зацепление и обусловленное этим снижение динамических нагрузок, позволяет повысить нагрузочную способность передачи.. Численная величина достигаемого эффекта зависит от степени точ ности и режима работы передачи и может быть объективно оцененатолько на основе статистической обработки экспериментальных данных. Увеличение КПД передачи может быть оценено уменьшением потерь на трение, которое в первом приближении пропорционально уменьшению диаметра рабочего червяка. Предложенное спироидное зацепление по сравнению с лучшими образцами известного зацепления позволяет повысить нагрузочную способность -и увеличить КПД. Формула изобретения 1. Спироидное зацепление одновенцового плоского колеса с рабочим червяком, в котором активные поверхности зубьев колеса взаимоогибаемы с витками производящего червяка и имеют локализованный контакт с витками ра- ; бочегр червяка, расположенного основным образом относительно колеса, о тличающееся тем, что, с целью повышения технологичности изготовления реальной передачи, производящий червяк выполнен цилиндрическим с нормальным шагом, равным нормальному шагу рабочего червяка, и делительным диаметром, большим делительного диаметра рабочего червяка в 1,1-1,4 раза, и станочное межосевое расстояние а о выбрано из условия VRp-COS Vp-y/y); « де RP М Spsorctc радиус и угол Р расположения центра локализованногопятна контакта;0 - межосевцр расстояние передачи; ТоД1 - делительные углы подъема соответственно производящегои рабочего червяков. 2. Зацепление по п о т л и ающееся тем, что отношение иаметров делительных цилиндров рабоего и производящего червяков выбрао равным
где do Н t диаметры делительных
цилиндров соответственно производящего и рабо чего червяков; d|ii. делителы«1й угол про- s филя левой поверхности. витка червяка. Источники информации, :принятые во внимание при экспертизе ю
