Изобретение относится к устройству реверсивных беззазорных червячных передач с переменной толщиной витка червяка, используемых, как правило, в приводах, оснащенных системой автоматического контроля точности изделий, например, в нажимных устройствах прокатных станов.
При этом беззазорность передачи должна сохраняться и по мере износа зубьев червячного колеса. Для достижения этой цели червяк выполняется с переменной вдоль оси толщиной витка, т.е. осевой шаг рxL по левой стороне витка выполняется отличным от шага рxR по правой стороне витка. Соответственно, осевые модули по левой mxL и по правой стороне витка mxR также различны. По мере износа зубьев червячного колеса червяк перемещают в осевом направлении, в зацепление вводится более толстый участок витка, и таким образом производится выборка зазора.
Известна червячная передача, содержащая двухшаговый рабочий червяк и сопряженное с ним одношаговое червячное колесо. Двойной шаг червяка в передаче получается за счет выполнения образующей начальной поверхности рабочего червяка под углом к оси рабочего червяка. При такой конструкции рабочего червяка шаги для левого и правого профиля вдоль оси различны, а в направлении образующей начальной поверхности одинаковы (см. патент РФ №2044194, кл. F 16 Н 1/16, заявлен 13.01.1992 г., опубликован 20.09.1995 г.). Нарезание зубьев червячного колеса в известной беззазорной червячной передаче осуществляется стандартизованными червячными фрезами для червячных колес. Однако, так как образующая начальной поверхности рабочего червяка расположена под углом к оси рабочего червяка, то впадины зубьев этого червяка располагаются на конической поверхности.
Известной червячной передаче присущи два недостатка. Во-первых, рабочий червяк невозможно отшлифовать на существующих червячно-шлифовальных станках без их значительной модернизации, а, во-вторых, из-за выполнения впадин зубьев рабочего червяка на конической поверхности происходит уменьшение радиального зазора в червячной передаче при перемещении червяка вдоль оси, что может привести к заклиниванию.
Наиболее близкой из известных беззазорных червячных передач является беззазорная червячная передача, описанная в отчете ЭНИМСа «Геометрический расчет червячных передач с червяками двойного шага» Захарьев Д.А., Острецов Г.В., Шарова С.С. Москва, 1953 г. Эта беззазорная червячная передача содержит рабочий червяк с переменной толщиной витка, обеспечиваемой разностью осевых модулей для правой и левой стороны витка, и червячное колесо, активные поверхности зубьев которого выполнены как огибающие производящей поверхности червячной фрезы. Разность правого и левого шагов Δрx=pxL-pxR обычно принимается в пределах (0,1...0,2)·mxcp. Осевой угол профиля на обеих сторонах витка рабочего червяка выполнялся равным стандартному αx1=20°. Переменная толщина витка червяка известной червячной передачи позволяет регулировать боковой зазор посредством осевого смещения рабочего червяка, что обеспечивает получение необходимого бокового зазора в передаче. Нарезание зубьев червячного колеса известной беззазорной червячной передачи выполнялось либо специальной фрезой, производящая поверхность которой была бы идентична активной поверхности витков червяка, либо однорезцовой летучкой в два прохода раздельно для каждой стороны зуба. Для первого из проходов тангенциальная подача рассчитывалась, исходя из осевого модуля mxL, для второго - из mxR.
Недостатком известного способа нарезания является то, что он крайне нетехнологичен и трудоемок. Кроме того, профили зубьев в среднем сечении колеса получаются несимметричными, причем профиль, соответствующий большему модулю, как правило, получается подрезанным.
Задача настоящего изобретения состоит в создании беззазорной червячной передачи, позволяющей за счет изменения конструкции червяка упростить изготовление червячного колеса и снизить трудоемкость изготовления передачи.
Поставленная задача достигается тем, что в беззазорной червячной передаче, содержащей рабочий червяк с переменной толщиной витка, обеспечиваемой разностью осевых модулей для правой и левой стороны витка, и червячное колесо, активные поверхности зубьев которого выполнены как огибающие производящей поверхности червячной фрезы, согласно изобретению осевые углы профиля для правой и левой стороны витка рабочего червяка выполнены различными между собой и при этом угол профиля витка червяка на стороне с большим значением модуля выполнен большим, чем угол профиля на противоположной стороне витка, а осевые модули и углы профиля для обеих сторон витка производящей поверхности фрезы для обработки зубьев червячного колеса выполнены равными между собой, причем указанные углы и модули связаны между собой зависимостями
mxR·cosγRcosαnR=mxL·cosγLcosαnL=mx0·cosγ0cosαn0.
где mxR, mxL - осевые модули соответственно правой и левой сторон витка червяка;
mx0 - осевой модуль червячной фрезы;
γ0, γR и γL - делительные углы подъема червячной фрезы и правой и левой сторон витка червяка, определяемые как
γ0=arctg(mx0·z0/d0), γR,L=arctg(mxR,L·z1/d1);
αn0, αnR и αnL - нормальные углы профиля червячной фрезы и правой и левой стороны витка червяка, связанные с осевыми углами профиля αх0, αxR и αxL зависимостями
tgαn0=tgαx0cosγ0; tgαnR,L=tgαxR,LcosγR,L;
z0 и d0 - число заходов и делительный диаметр червячной фрезы.
Z1 и d1 - число заходов и делительный диаметр рабочего червяка.
Кроме того, в способе нарезания зубьев червячного колеса беззазорной передачи, согласно изобретению, ось фрезы при обработке зубьев червячного колеса развернута по отношению к средней плоскости колеса в сторону увеличения наклона зуба червячной фрезы на угол
Δγ=γR-γ0 (если mxR<mxL) или
Δγ=γL-γ0, (если mxR>mxL),
а делительный диаметр фрезы выполнен большим делительного диаметра червяка и выбран из условия
Такое конструктивное выполнение беззазорной червячной передачи и выполнение способа нарезания зубьев червячного колеса беззазорной червячной передачи позволяют упростить изготовление червячного колеса за счет изменения конструкции червяка и снизить трудоемкость изготовления передачи за счет повышения технологичности червячного колеса. Это достигается благодаря тому, что зубья червячного колеса нарезают обычной архимедовой червячной фрезой увеличенного по отношению к червяку диаметра со стандартными модулем mx0, осевым углом профиля αx0 и соответствующим им модулем зацепления mb0, а равенство шагов зацепления на двух сторонах витка обеспечивать за счет коррекции осевых углов αxL и αxR профиля червяка.
Для пояснения изобретения ниже приводится конкретный пример выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
на фиг.1 изображено сечение предлагаемой беззазорной червячной передачи плоскостью, проходящей через ось O1-О1 червяка и перпендикулярной оси O2-O2 колеса;
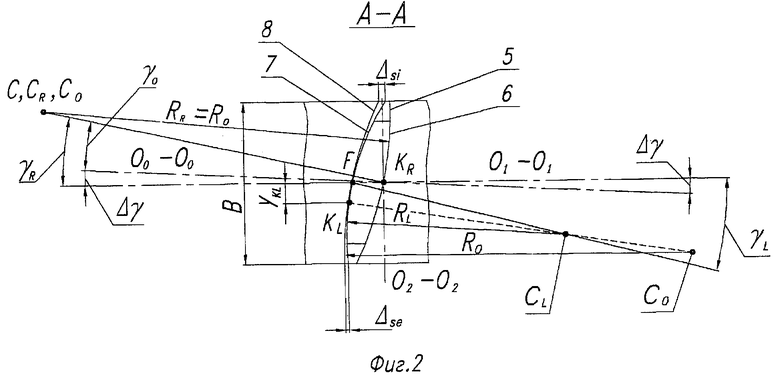
на фиг.2 изображено сечение предлагаемой беззазорной червячной передачи плоскостью А-А (на фиг.1), касательной к делительному цилиндру червяка и параллельной оси O2-О2 колеса.
Предлагаемая передача (фиг.1) включает в себя рабочий червяк 1 и червячное колесо 2. Рабочий червяк 1 снабжен одним или несколькими витками (заходами) 3. Для достижения беззазорности передачи осевые шаги по левой рxL и правой рxR стороне витка выполнены различными между собой. При этом осевые углы профиля витка αxL и αxR также различны и выбраны таким образом, чтобы осевой шаг зацепления
pb=pxRcosαxR=pxLcosαxL
был одинаков для обеих сторон витка.
Червячное колесо 2 снабжено зубьями 4. Правый и левый торцовые профили зубьев 4 в рассматриваемом сечении выполнены симметричными и очерчены по эвольвентам общей основной окружности радиуса Rb2=z2pb/2π, где z2 - число зубьев червячного колеса. Профили зубьев червячного колеса ограничены окружностью вершин радиуса Ra2.
Профили витков 3 червяка 1 зацепляются с профилями зубьев 4 червячного колеса 2 по линиям зацепления NR-AR для правого профиля и NL-AL для левого профиля. Обе линии зацепления касаются основной окружности колеса в точках NR и NL и пересекают межосевой перпендикуляр передачи в, соответственно, правом РR и левом PL полюсах зацепления. Расстояния от точек РR и РL до оси О1-О1 червяка 1 определяет собой радиусы начальных цилиндров червяка для разных сторон профиля.
Ось червяка O1-O1 (фиг.2) расположена горизонтально. Зубья 4 червячного колеса 2 нарезаются обычной архимедовой червячной фрезой увеличенного по отношению к червяку 1 диаметра. Ось фрезы О0-О0 развернута относительно оси червяка O1-О1 на угол Δγ (для того, чтобы не загромождать рисунок, сама фреза на нем не показана).
Правый профиль 5 витка 3 червяка 1 касается профиля 6 зуба 4 червячного колеса 2 в точке КR. Точка KR расположена в средней плоскости колеса, и пятно контакта распространяется практически на всю ширину В колеса. На левой стороне 7 витка червяка пятно контакта локализовано в продольном направлении и смещено в сторону входа червяка в зацепление. Центр его находится в точке KL, отстоящей от средней плоскости колеса на величину yKL.
Для правой стороны витка центры кривизны профилей рассматриваемых сечений витка червяка и фрезы совпадают между собой в точке С. Прямая КRС представляет собой общую нормаль к правому профилю 5 витка 3 червяка и зубу 4 червячного колеса в точке КR. Прямая КRС составляет с осью червяка O1-O1 угол γR, равный углу подъема правой стороны витка червяка на делительном цилиндре. С проекцией оси фрезы О0-О0 прямая КRС составляет угол γ0, равный углу подъема витка червячной фрезы на ее делительном цилиндре. Расстояние KRC=RR=R0 представляет собой радиусы кривизны указанных профилей в расчетной точке KR.
Центр СL кривизны левого профиля 7 витка 3 червяка расположен на прямой FCL, составляющей с осью O1-О1 угол γL равный углу подъема левой стороны витка на делительном цилиндре. Точка СL и центр С0 кривизны рассматриваемого сечения витка фрезы лежат на прямой KLС0, которая представляет собой общую нормаль к левому профилю 7 витка 3 червяка и профилю 8 зуба 4 червячного колеса в точке KL. Расстояние CLKR=RR и C0KL=R0 представляют собой радиусы кривизны указанных сечений в расчетной точке.
Показанные на фиг.1 и 2 плоские сечения предлагаемой беззазорной червячной передачи вполне адекватно иллюстрируют ее принципиальные особенности. Пространственный характер зацепления учтен более строгими математическими формулами, приведенными ниже в примере расчета геометрических параметров.
Беззазорная червячная передача работает следующим образом.
Вводим в зацепление витки червяка и зубья червячного колеса, выдержав расстояние между осями О1-О1 и О2-O2 равным aw. Перемещая червяк вдоль оси О1-О1, добиваемся минимального бокового зазора fmin, исключающего заклинивание зубьев в передаче.
При вращении червяка вокруг оси О1-O1 витки 3 червяка 1 зацепляются с зубьями 4 червячного колеса 2, поворачивая все колесо вокруг оси O2-О2. Направление поворота червячного колеса зависит от направления захода (левое или правое) червяка и направления его вращения. Если червяк правый, то при повороте червяка вокруг оси O1-O1 в направлении, показанном стрелкой ω1, червячное колесо будет вращаться вокруг оси O2-O2 в сторону ω2пр. Если червяк левый, то при повороте червяка вокруг оси О1-O1 в сторону ω1 червячное колесо повернется вокруг оси O2-О2 в сторону ω2лев.
В процессе работы зубья 4 червячного колеса 2 изнашиваются. При этом в передаче появляется дополнительный боковой зазор ft, больший требуемого fmin. При реверсе передачи (т.е. при изменении направления вращения червяка) червяк 1 должен будет повернуться на некоторый угол Δϕ1, равный Δϕ1=2ft/(z1mxcp), прежде чем он начнет поворачивать червячное колесо 2 противоположной стороной витка. Указанный угол определяет возможную точность настройки положения червячного колеса, точность системы автоматического контроля изделия, в которой используется предлагаемая передача, и, в конечном счете, точность самого выпускаемого изделия.
Для восстановления минимального бокового зазора необходимо переместить червяк 1 вдоль оси O1-O1 по стрелке М, вводя в зацепление участок витка с большей толщиной. Необходимая величина Δ перемещения червяка определяется выражением:
Δ=πmxcp(ft-fmin)/Δpx.
Пример расчета беззазорной червячной передачи согласно предполагаемому изобретению.
Исходные данные передачи:
aw - межосевое расстояние передачи;
z1 - число витков (заходов) червяка;
z2 - число зубьев колеса;
d1 - делительный диаметр червяка, мм;
mxcp - средний осевой модуль червяка;
mxL - осевой модуль по левой стороне витка;
mxR - осевой модуль по правой стороне витка.
Исходные данные фрезы:
mх0 - осевой модуль червячной фрезы;
d0 - делительный диаметр червячной фрезы, мм;
z0 - число витков (заходов) червячной фрезы;
αх0 - угол профиля фрезы в осевом сечении, град;
γ0 - делительный угол подъема витка червячной фрезы.
По этим исходным данным находим последовательно:
осевые шаги для левого и правого профиля червяка
РxL=πmxL
рxR=πmxR
разность осевых шагов левого и правого профиля
Δpx=pxL-pxR
делительные углы подъема для левой и правой стороны витка червяка
γL=arctg(mxL·z1/d1)
γR=arctg(mxR·z1/d1)
нормальный угол профиля червячной фрезы
αn0=arctg(tgαx0·cosγ0) модуль зацепления
mb0=mх0·cosγ0cosαn0.
нормальные углы профиля для левой и правой стороны витка червяка
αnL=arccos[mb0/(mxL·cosγL)]
αnR=arccos[mb0/(mxRcosγR)]
осевые углы профиля для левой и правой стороны витка червяка
αxL=arctg(tgαnL/cosγL)
αxR=arctg(tgαnR/cosγR).
В случае если получившиеся значения αxR выходят за пределы диапазона (15°...25°), корректируем исходные значения mxL и mxR, по возможности сохраняя заданную разность Δрх, и повторяем расчет.
После этого определяем радиусы кривизны сечения витка плоскостью, касательной к его делительному цилиндру,
RR=0,5d1/(tgαxRcos3γR)
RL=0,5d1/(tgαxLcos3γL)
и сравниваем больший из них с радиусом кривизны аналогичного сечения витка фрезы
R0=0,5d0/(tgαx0cos3γ0).
Для случая mxR<mxL условие R0>RR означает, что в передаче обеспечивается локализация пятна контакта. Если условие R0>RR не выполнено, то необходимо увеличить диаметр фрезы и повторить расчет. На другой стороне витка RL будет заведомо меньше R0.
Если mxR>mxL то аналогично локализация пятна контакта будет обеспечиваться при выполнении условия R0>RL. При невыполнении условия R0>RL также необходимо увеличить диаметр фрезы и повторить расчет. На правой стороне витка RR будет заведомо меньше R0.
Станочное межосевое расстояние при нарезании зубьев составляет
a0=aw+0,5(d0-d1).
Ось фрезы должна быть развернута относительно средней плоскости колеса в сторону увеличения наклона зуба на угол
Δγ=γR-γ0, если mxR<mxL или
Δγ=γL-γ0, если mxR>mxL.
При этом в показанном на фиг.2 случае mxR<mxL расчетная точка на правой стороне зуба расположена в средней плоскости колеса, а пятно контакта распространяется практически на всю ширину червячного колеса. На левой стороне зуба пятно контакта локализовано в продольном направлении и центр его немного смещен в сторону входа червяка в зацепление на величину, определяемую выражением
yKL=-R0RL[sin(Δγ+γ0)-sinγL]/(R0-RL).
В случае mxR>mxL, картина контакта на двух сторонах витка, показанная на фиг.2, развернется на 180° относительно точки КR.
Величина продольного отвода у торцов колеса приближенно определяется выражениями:
со стороны входа витка червяка в зацепление
Δsi≈(0,5В+yкL)2(1/RL-1/R0)/2cos2γL;
со стороны выхода витка из зацепления

Предложенная беззазорная червячная передача позволяет упростить изготовление червячного колеса за счет изменения конструкции червяка и снизить трудоемкость изготовления передачи за счет повышения технологичности червячного колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Червячная передача | 1980 |
|
SU947531A1 |
| ОРТОГОНАЛЬНАЯ ДВУХМОДУЛЬНАЯ ЧЕРВЯЧНАЯ ПЕРЕДАЧА | 1999 |
|
RU2159370C2 |
| Червячная передача | 1988 |
|
SU1573263A1 |
| СПОСОБ КОМПЕНСАЦИИ ЗАЗОРОВ В ЧЕРВЯЧНЫХ ПЕРЕДАЧАХ ПРИ ВОЗВРАТНО-ВРАЩАТЕЛЬНОМ ДВИЖЕНИИ И БЕЗЗАЗОРНАЯ ЧЕРВЯЧНАЯ ПЕРЕДАЧА | 2020 |
|
RU2737563C1 |
| Червячная передача | 1983 |
|
SU1128020A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА | 1992 |
|
RU2044194C1 |
| Способ нарезания зубьев колеса червячной цилиндрической передачи | 1983 |
|
SU1117158A1 |
| Способ изготовления червячной передачи | 1979 |
|
SU837636A1 |
| СПОСОБ ОБРАБОТКИ ЧЕРВЯЧНОГО КОЛЕСА МОДИФИЦИРОВАННОЙ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ | 1991 |
|
RU2116873C1 |
| Способ обработки червячного колеса | 1980 |
|
SU992138A1 |
Изобретение относится к устройству реверсивных беззазорных червячных передач с переменной толщиной витка червяка и может быть использовано в приводах, оснащенных системой автоматического контроля точности изделий, например в нажимных устройствах прокатных станов. Передача содержит рабочий червяк с переменной толщиной витка и червячное колесо. Осевые углы профиля для правой и левой сторон витка рабочего червяка выполнены различными между собой. Углы профиля для обеих сторон витка производящей поверхности фрезы для обработки зубьев червячного колеса выполнены равными между собой и связаны между собой определенными зависимостями. Приведен способ нарезания зубьев червячного колеса беззазорной червячной передачи, который осуществляется путем разворота оси фрезы при обработке зубьев червячного колеса по отношению к средней плоскости колеса в сторону увеличения наклона зуба червячной фрезы на заданный угол. Делительный диаметр фрезы выполнен большим делительного диаметра червяка и выбран из заданного условия. Технический результат - упрощение изготовления червячного колеса и снижение трудоемкости изготовления передачи. 2 н.п. ф-лы, 2 ил.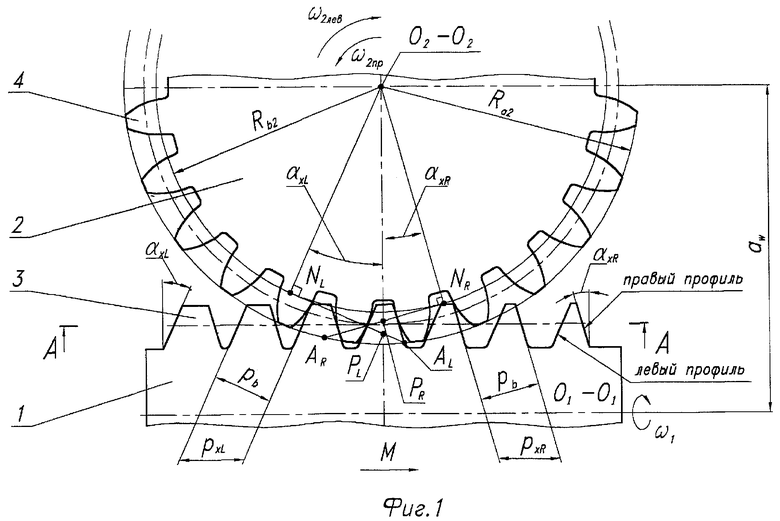
mxR·cosγRcosαnR=mxLcosγLcosαnL=mx0cosγ0cosαn0,
где mxR, mxL - осевые модули соответственно правой и левой сторон витка червяка;
mx0 - осевой модуль червячной фрезы;
γ0, γR и γL - делительные углы подъема червячной фрезы и правой и левой сторон витка червяка, определяемые как
γ0=arctg(mx0·z0/d0), γR,L=arctg(mxR,L·z1/d1);
αn0, αnR и αnL - нормальные углы профиля червячной фрезы и правой и левой сторон витка червяка, связанные с осевыми углами профиля αх0, αxR и αxL зависимостями:
tgαn0=tgαx0·cosγ0; tgαnR,L=tgαxR,LcosγR,L;
z0 и d0 - число заходов и делительный диаметр червячной фрезы,
z1 и d1 - число заходов и делительный диаметр рабочего червяка.
Δγ=γR-γ0, если mxR<mxL, или
Δγ=γL-γ0, если mxR>mxL,
а делительный диаметр фрезы выполнен большим делительного диаметра червяка и выбран из условия
| ЗАХАРЬЕВ Д.А., ОСТРЕЦОВ Г.В., ШАРОВ С.С | |||
| Геометрический расчет червячных передач с червяками двойного шага | |||
| - М.: ЭНИМС, 1953 | |||
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА | 1992 |
|
RU2044194C1 |
| Аппарат для воздействия электрическимпОлЕМ HA МиКРООРгАНизМы, НАХОдящиЕСяВ жидКОй СРЕдЕ | 1979 |
|
SU844629A2 |

