(54) УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ЮТОРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки роторов и устройство для его осуществления | 1980 |
|
SU943546A1 |
| Устройство для балансировки роторов | 1980 |
|
SU938042A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Устройство для балансировки роторов | 1980 |
|
SU938043A1 |
| Устройство для балансировки роторов | 1977 |
|
SU772361A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1971 |
|
SU424371A3 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1979 |
|
SU778467A1 |
| Способ изготовления ротора электростатического гироскопа и устройство для осуществления этого способа | 2016 |
|
RU2638870C1 |
| Балансировочное устройство | 1980 |
|
SU945698A1 |
| Способ изготовления ротора шарового гироскопа | 2020 |
|
RU2743492C1 |
1
Изобретение относится к балансировочной технике и может быть использовано для лазерной обработки изделий, например сферических.
Известно устройство для балансировки шаровых роторов гиромоторов лучом лазера за счет испарения некоторой массы с поверхности ротора в тяжелом его месте, содержащее вакуумнуй камеру, в которой размещается балансируемый ротор, блок управления, соединенный с ним оптически1С квантовый генератор РКГ и механизм корректировки с оптической системой, связанной с выходом ОКГ I .
Недостатком устройства является низкая производительность балансировки из-за того, что испарение массы с поверхности ротора требует постоянного удаления продуктов эрозии для вакуумной камеры, а это требует остановки ротора и подготовки камеры к последующему циклу балансировки.
Наиболее близким к изобретению по технической сущности является . устройство для балансировки роторов, содержащее вакуумную камеру, в которой размещается балансируемый ротор , блок управления, соединенней с ним ОКГ и механизм корректировки с оптической системой, связанной с выходом ОКГ 2..
Однако устройство не позволяет
10 балансировать сферические роторы, что снижает его производительность.
Цель изобретения - повышение производительности при балансировке сферических роторов.
IS
Поставленная цель достигается тем, что устрсЛство снабжено электростатической подвеской ротора, выполненной в виде трех соединенных с блоком управления электродов, ус20тановленных во взаимно перпевдикулярных плоскостях.
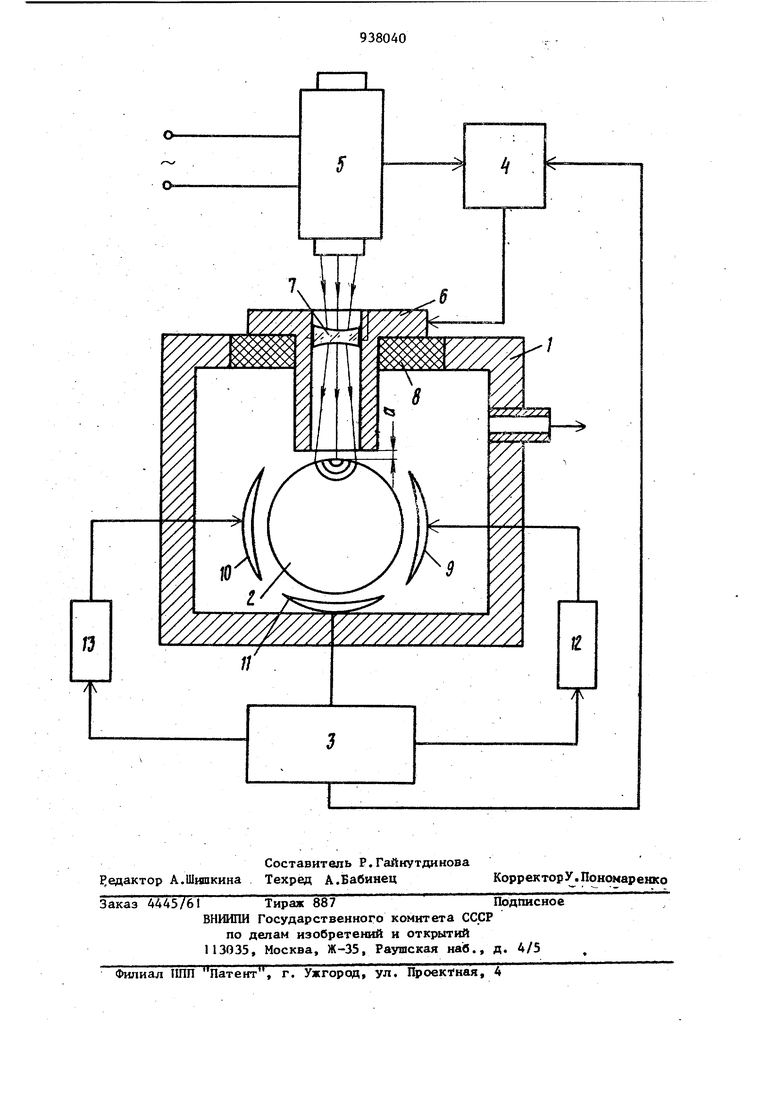
На чертеже изображено Устройство для балансировки роторов, общий вид. Устройство содержит вакуумную камеру I, в которой размещается балансируеьвлй ротор 2, блок 3 управле ния, соединенный с ним через блок 4 управления величиной силы прецессии ОКГ 5, механизм корректировки, выполненный в виде за зрепленной на камере I втулки 6 из титанового спл ва, оптической систе в виде рассе ивающей линзы 7, размещенной во втулке 6 и связанной с выходом ОКГ 5, и изолятора 8, посредством которого втулка связана с камерой 1, а также электростатическую подвеску ротора 2, выполненную в виДе трех электродов 9-11, при этом электроды 9 и .10 соединены с блоком 3 управления через соответствукмцие блоки 12 и 13 с мостовой схемой поддер жания уровня ротора 2 и устанавлива ются диаметрально относительно рото ра 2, а электрод -11 соединен с блоком 3 управления и установлен диаме рально с линзой 7 механизма корректировки в плоскости, перпендикулярной плоскости расположения электродов 9 и 10. Устройство работает следукицим об раз ом. Вакуумная камера 1 приводится в рабочее состояние: из нее откачивается воздух посредством вакуумного насоса и штуцера (не показаны),вклю чается в работу электростатическая подвеска и через электроды 9 и 10 и блоки 3, 12 и 13 ротор 2 приводится во вращение с заданной частотой. Блок 4 отслеживает дисбаланс ротора 2 и включает в работу ОКГ 5. Излучение лазера ОКГ 5 через лин зу 7, установленную во втулке 6, служащей анодом для системы полиров ки и сбора материалов эрозии, попадает на поверхность ротора 2 и вызывает эмиссию ионов и электронов, имеющих отрицательный заряд. Расфокусировка линзы 7 обеспечивает полировку наибольшей площади и не создает условий прожига. При достижении заданного съема материала происходит перераспределение масс ротора 2. Для поддержания постоянно го зазора О между оптической системой и поверхностью балансируемого ротора 2 включается в работу электрод 11, управляемый блоком 3. По мере нагрева и съема корректирующей массы с ротора 2 под действием 0I 4 излучения лазера ОКГ 5 происходит дрейф ротора 2 так, что обрабатываются все новые и новые зоны поверхности ротора 2 до тех пор, пока не уравновесятся динамические составляющие ротора 2, при этом процессом балансировки управляет электрод 11, который следит за величиной зазора Q. Как только определенная зона поверхности ротора 2 обрабатыва;ется, ротор 2 поворачивается с тем чтобы другая зона обрабатываемой поверхности оказалась в зоне действия излучения лазера ОКГ 5 и т.д., т.е. ротор 2 автоматически поворачивает относительно оси вращения тяжелой точкой. Испаренный с поверхности ротора 2 материал концентрируется внутри втулки 6. Наличие электростатической подвески ротора, исключающей механическую установку сферического ротора в корпусе, позволяет повысить производительность балансировки за счет возможности балансировки сферического ротора с одного установа, при этом электростатическая подвеска позволяет последовательно воздействовать на все зоны поверхности ротора. Формула изобретения Устройство для балансировки роторов, содержащее вакуумную камеру, в которой размещается балансируемый , ротор, блок управления, соединенный с ним оптический кваитовыА генератор и механизм корректировки с оптической системой, связанной с выходом оптического квантового генератора, отличающееся тем, что, с целью повышения производительнос- -и при балансировке сферических роторов, оно снабжено, электростатической подвеской ротора, выполненной в виде трех соединенм 1х с блоком управления электродов, установленных во взаимно перпендикулярных плоскостях. Источники информации, принятые во внимание при экспертизе 1.Скворчевский А.К., Промыслов Е.В. Уравновешивание вращающихся масс гироприборов. Л., Судостроение, 1979, с. 162-164. 2.Авторское .свидетельство СССР 571121, кл. G 01 М 1/38, 1974 (прототип).
