(54) УПРАВЛЯЕМЫЙ ИСТОЧНИК ПИТАНИЯ НА БАЗЕ
ЭЛЕКТРОМАШИННЫХ АГРЕГАТОВ С ИНЕРЦИОННЫМИ
НАКОПИТЕЛЯМИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| Ветроэнергетическая установка | 2016 |
|
RU2615564C1 |
| СПОСОБ ЭЛЕКТРОПИТАНИЯ | 2015 |
|
RU2586895C1 |
| Способ изготовления усовершенствованной магнитоэлектрической машины | 2017 |
|
RU2667661C1 |
| Инерционный накопитель энергии | 1989 |
|
SU1781777A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИСТЕМОЙ ГАРАНТИРОВАННОГО ПИТАНИЯ | 1996 |
|
RU2097899C1 |
| СПОСОБ И УСТРОЙСТВО ПРОИЗВОДСТВА ЭЛЕКТРОЭНЕРГИИ ЗА СЧЁТ ТУРБИН И ГЕНЕРАТОРОВ С ПЕРЕМЕННЫМ МОМЕНТОМ ИНЕРЦИИ | 2014 |
|
RU2684867C2 |
| ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2094250C1 |
| СПОСОБ ПУСКА СИНХРОННЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2096902C1 |
| Способ управления дизель-инерционным агрегатом гарантированного питания с асинхронизированной синхронной электрической машиной | 1989 |
|
SU1809494A1 |
1
Иэобрютение относится к технике энергоснабжения импульсных потребителей электроэнергии, установок физичеокого эксперимента либо объектов промышленной технологии, характеризуемых преимущественно индуктивным импедансом нагрузки и необходимостью быстрого управления током в ее uemii, таких, как термоядерные установки с магнитным удержанием плазмы, плазме - ,д ные ускорители, мощные электромагниты и т. п.
Для обеспечения энергией указанных и других подобных им устройств, работающих, как правило, в импульсном жиме, не редко используются источн1пси пита НИН на базе электромашинных ре гатов с инерционными накопителями.
Известны инерционные накопители с регулированием напряжения
Однако в известных вариантах быст. родействие регулирования тока в индуктивной нагрузке существенно ограничено вследствие инерционности цепи возбужд ния генератора и инерционности цепи нагрузки (постоянная времени порядка 1 с.).
Некоторое улучшент е динамических характеристик управляемого электромашинного источншса питания с инерционными накопителями достигается за счет введения электромеханической положительной обратной связи посредством отбора части мощности из цепи нагрузки для создания дополнительного крутящего момеета на валу генератора (в устано&не энергоснабжения с накопителем механической энергии, выполненным в виде маховика 1.21.Однако |я в этом устройстве вз-за инерционности системы электромеханической обратной связи нельзя осуществить быстрое wsMeasaas тока в цепи нагрузки путем BOSftej CTBHH на цепи возбужде-ния генераторе или се жодвигателя в контуре обратной связи.
Таким образом, анализ рассмотренных авалсягов показывает, что с точки зрения требованвй высокого быстродействия и
39422004
большой энергоемкости наиболее приемле- ты. Последние при отсутстоии тока в мым является сочетание инерционного на-обмотках статоров сивдронных гояератокопитепя и эпектрон П)го управляющего устройства в цепи нагрузки. В этом случае знач ггельные пре 5мущества перед иоточниками с другими видами генераторов имеет источник с синхронным генератором и коммутируемой цепью нагрузки.
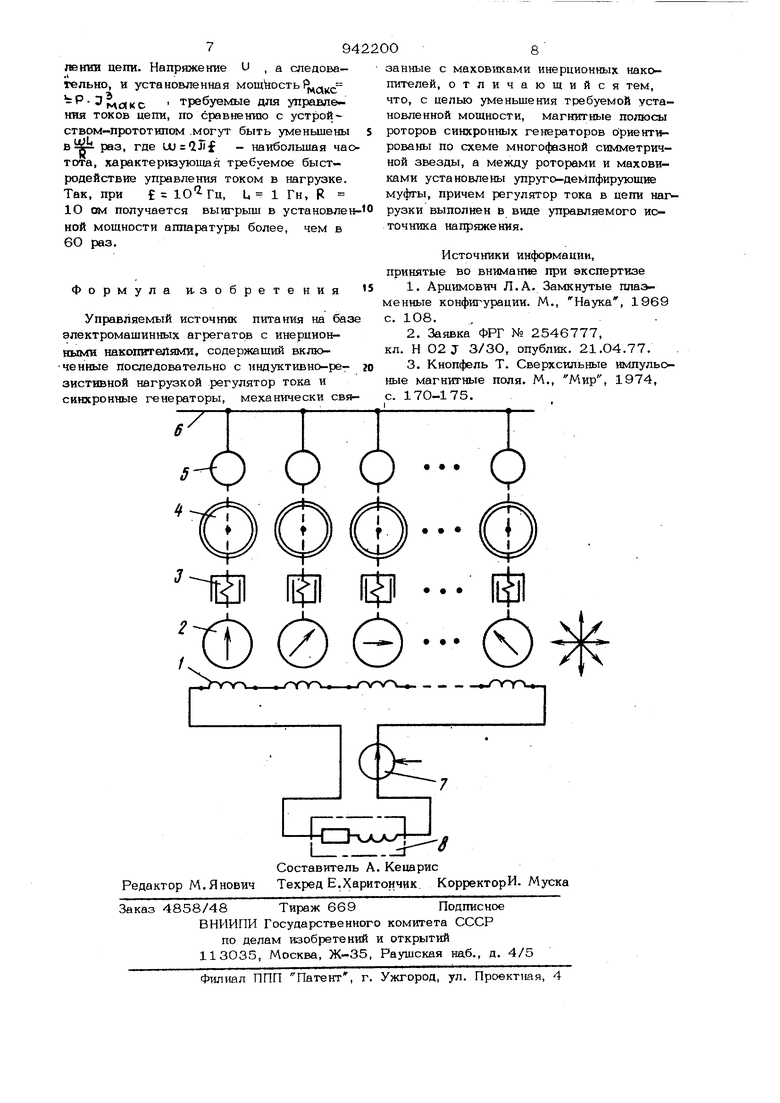
Известен инерционный накопитель, который содержит некоторое число идентичных синхронных генераторов с включенными последовательно обмотками статоров и синфазно ориентированными магнит ными моментами роторов. Последние жестко связаны с .маховиками, приводимыми во вращение синхронными двигателями, питаемыми от сети переменного тока. Обмотки подключены через регулятор тока к индуктивно-резистивной нагрузке З. Так как синхронные генераторы в этом устройстве работают в синфазном режиме, а угловые скорости их вращения 1за рабочий импульс изменяются незначи. тепьно (обычно на величину не более 2О%), то напряжение на входе регулятор тока существенно не меняется. Оно долж но быть примерно равно максимальному напряжению на 1агрузке . , необходимому для соединения требуемой скорости изменения тока через нее. Следоватеяьно, регулятор тока устройствапрототипа должен быть рассчитан на мак симальное напряжение и максималь ный токО| д ц,в 1агрузке. При бопьщой импульсной мощности Pмaкc aкc мallc потребляемой нагрузкой, быстродействующий регулятор тока становится трудно осу ществимым из-за чрезмерно больщой требуемой мощности электронной аппаратуры которая должна возрастать с увеличением требовантш по. быстродействию. Цель изобретения - значительное уменьщение требуемой установленной мощности регулирующей аппаратуры при сохранении основных достоинств прототипа - больщой удельной энергоемкости рекуперации энергии при сбросе нагрузки и возможности быстрого управления токов в нагрузке с преш ущественно индуктивным характером импеданса. Указанная цель достигается тем, что в качестве регулятора тока в цепи нагрузки применяется управляемый источник напряжения , а роторы синхронных генэужторов приводятся во вращение от синхронных двигателей с махоPiiKaNfH 4ej.)e3 упрутчь-демпфирующие муфров задают начальные направления маг нитных моментов из роторов во вращающейся системе отсчета в виде многофазной симметричной звезды, т. е. с равноотстоящими начальными фазами, дающими в сумме 2.JI . Кроме того, муфты обеспечивают возможность демпфированных крутильных колебаний магнитных моментов роторов относительно их невозмущенных направлений. Собственная частота этих колебаний , должна быть ниже частоты синхронных генераторов. На чертеже показано предлагаемое устройство. Предлагаемое устройство состоит из ряда идентичных синхронных генераторов в количестве N 3 с включенными последовательно обмотками 1 статоров. Роторы 2 синхронных генераторов механически связаны через упруго-демпфирующие муфты 3 с маховиками 4, приводимыми во вращение синхронными двигателями 5, питаемыми от сети 6 переменного тока. Обмотки 1 статоров через последовательно включенный упра&ляемый источник 7 напряжения подключены к индуктивно-резистивной нагрузке 8. начальная фазировка магкитных моментов роторов 2 в виде симN -фазной звезды обеспеметричнойчивается начальными углами установки муфт 3 на валах маховиков 4 и синхрофазкостью вращения синхронных двигателей 5, имеющих для устранения неоднозначности их начальных фаз двухполюсные роторы и трехфазные обмотки статоров, рассчитанные на электропитание от промышленной трехфазной сети, Устройство работает следующим обраПеред включением управляемого иоточника 7 напряжения маховики 4 и роторы 2 должны быть приведены во вращение с помощью синхронных двигателей 5. Тогда, благодаря выбранной начальной ориентации магнитных моментов роторов 2 в виде qиммeтpичнoй звезды и последовательному соединению обмоток 1 статора, суммарная электродвижущая, сила на нагрузке 8 равна нулю. Ток в цепи нагрузки 8 не протекает и роторы 2 не испытьшают никаких электродина1ч1ических воздействий из-за отсутствия маг- нитного поля обмоток 1 статора. При подаче управляющего сигнала ш управляемый ис1-очник 7 напряжения последний развива т некотор то алектродвижущую силу и вызывает протека1гае тока через обмотки 1 статора и через нагрузку 8 в направпеЕ1ИИ заданном управляющим сигналом. Возникший ток привод к периодической неравномерности вращения ротора 2 под действием знакопеременных электродинамических усилий со стороны магнитного поля обмоток 1 статора благодаря тому, что упруго-демп- фируюише муфты 3 допускают крутильные колебания. Ранее было указано, что собственная частота крутильных колебаний выбирается ниже частоты синхронного генератора, т. е. частоты периодических сил, дей- ствующих на ротор при его вращении в поле статора. Более конкретно, вращение ротора замедляется , когда его полюсы приближаются к одноименно намагниченным полюсам статора и ускоряется при сближении разноименных полюсов. Это приводит к тому, .что в среднем за период вращения полюсы ротора находятся дольще вблизи одноименных им полюсов статора и меньщее время - вблизи противоположных полюсов. Таким образом, у каждого из синхронных генераторов средний за период магнитный поток ротора направлен навстречу магнитному потоку, который создается током, протекающим по обмотке статора. Благодаря последовательному соединению генераторов и сдвигу их начальных фаз быстропеременные составляющие магнитных потоков через обмотки 1 взаимно компе нсируются. За счет того, что увеличение времени полупериода, в котором полюса ротора и статора отталкиваются, не полностьюкомпенсируется сокращением времени полупериода, соответствующего притяжению разноименных полюсов, средняя длительность всего периода вращения увеличивается. Таким образом,, движение роторов синхронных генераторов в срейнем тормозится пондеромоторными силами при увеличении силы ток& в обмотках ста тора и ускоряется в обратном случае. Это означает, что при увеличении тока в цепи нагрузки энергия маховиков пе- редается к нагрузке. Соответственно, при уменьшении тока энергия возвращает ся, от нагрузки к маховикам, ускоряя их вращения. Тем самым автоматически ; осуществляется режим рекуперации энергии, часть энергии, KOHe4HCk., теряется на активном сопротивлении цепи и поглощается в упруго-демпфирующих муфтах. Впрочем, при электромагнитном демпф ровании можно осуществить рекуперацию энергии. Е)лагодаря первоначальной звездообразной ориентации магнитных моментов роторов переменные составляющие магнитного потока сквозь обмотки 1 статоров взаимно компенсируются, так что при достаточно большом числе N синхронных генераторов суммарная переменная соотавляющая потока оказывается практически равной нулю. Постоянные же соотавляющие магнитного потока, возникаюшие за счет колебаний роторов по фазе и направленные навстречу первичному потоку статора, суммируются. При достаточ- но большой величине магнит(ых моментов роторов 2 втo pVIчный поток Фп по абсолютной величине оказывается больше первичного ф , так что суммарный поток Ф направлен навстречу первичному. Это означает, что- изменяющийся магнитный поток создает электродвижущую силу, .противоположную по направлению индуктивной составляющей падения напряжения по обмотках 1 статора. Указанная электродвижущая сила складывается с напряжением и тхравляемого источника 7 напряжения, усиливая его и приводя к даль-кейшему возрастанию тока 3 в цепи в соответствии с уравнением b-f«- -if где R - суммарное активное сопротиБление цепи, - самоиндукция цепи нагрузки, Ф - суммарный поток магнитного поля сквозь обмотки 1 статоров. Отрицательный коэффициент пропорциональности между потоком Ф и током 3 в обмотках 1, имеющий отрицательную ве личину и размерность -самоиндукции, обозначают через Ц - , Тогда уравнение цепи примет вид: (ь-Цн) Отсюда видно, что при Ц 7 U) система устойчива, так как корень характеристического уравнения в этом случае имеет вещественнуюотриаательгную величину. Основной эффект заключается в том, что при заданной величине требуемой скорости . нарастания тока 3 напряжение U .Ткоторое должен развивать управляемый источник 3 напряжения, может быть уменьшено без потери устойчивости системы до величины R2 падения напряжения на активном сопротив
