(Я) МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СООСНОЕ ВИБРАЦИОННО-УДАРНОЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРФОРАТОР | 2009 |
|
RU2487795C2 |
| УДАРНО-ВРАЩАТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2200816C2 |
| ВИБРАЦИОННОЕ УСТРОЙСТВО | 1999 |
|
RU2175578C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2012 |
|
RU2596551C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2477212C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2510326C2 |
| БУРИЛЬНЫЙ МОЛОТОК | 2008 |
|
RU2453420C2 |
| Бурильно-отбойная машина возвратно-поступательного действия | 1984 |
|
SU1157223A1 |
| УДАРНЫЙ МЕХАНИЗМ | 2015 |
|
RU2610320C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ БУРА В УДАРНО-ВРАЩАТЕЛЬНОЙ МАШИНЕ | 1996 |
|
RU2141892C1 |



1
Изобретение относится преимущественно к строительству, горному делу и другим отраслям техники, где требуются устройства для технологической обработки деталей и массовых сред, использующие преобразование вращательного движения привода в возвратно-поступательное перемещение исполнительного органа.
Известен механизм преобразования вращательного движения в соосное возвратнопоступательное, содержащий ведущий элемент вращательного движения, ведомый элемент возвратно-поступательного движения, втулку, установленную в корпусе, имеющую отверстие с неравными осями, шарнирный четырехугольник. Одна из вершин этого четырехугольника соединена с ведущим элементом, другая - с ведомым элементом, остальные две опираются на стенки отверстия втулки посредством роликов. При вращении ведущего элемента и соединенного с ним четырехугольника ролики прижимаются к стенкам втулки центробежными силами. Вследствие неравенства осей втулки расстояние между вершинами четырехугольника изменяется, и ведомый элемент совершает возвратно-поступательное движение 1.
Недостатками этого механизма являются сложность конструкции, большое количество и технологическая сложность деталей, невозможность получить значительный ход ведомого элемента при ограниченных поперечных размерах. Попытка увеличения кинетической энергии ведомого элемента приводит к быстрому износу механизма. Область применения механизма ограничивается приводами насосов, компрессоров и других
JQ поршневых машин с безударным движением ведомого элемента.
Известен механизм для преобразования вращательного движения в соосное вибрационно-ударное, включающий корпус, в котором размещены связанные друг с другом
15 сухарем соосные элементы - один вращательного движения, а другой возвратнопоступательного с внутренней полостью, на одном из которых нанесены винтовые пазы двух направлений, элементы переклю2Q чения направления движения 2}.
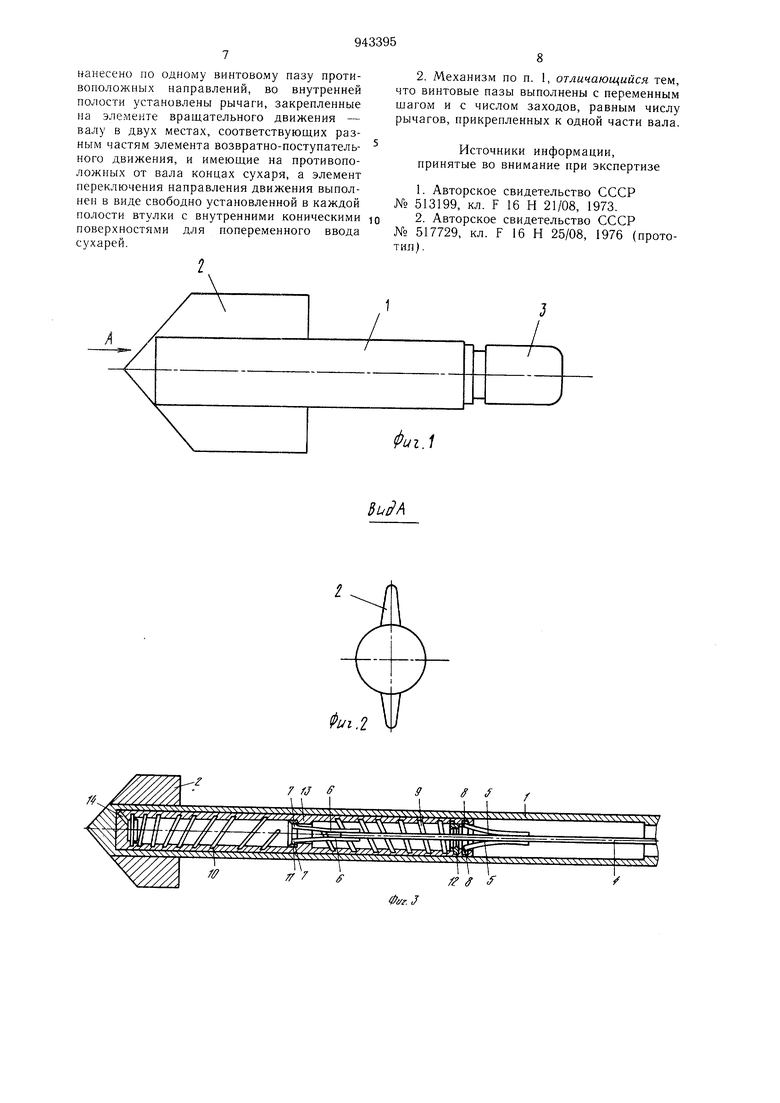
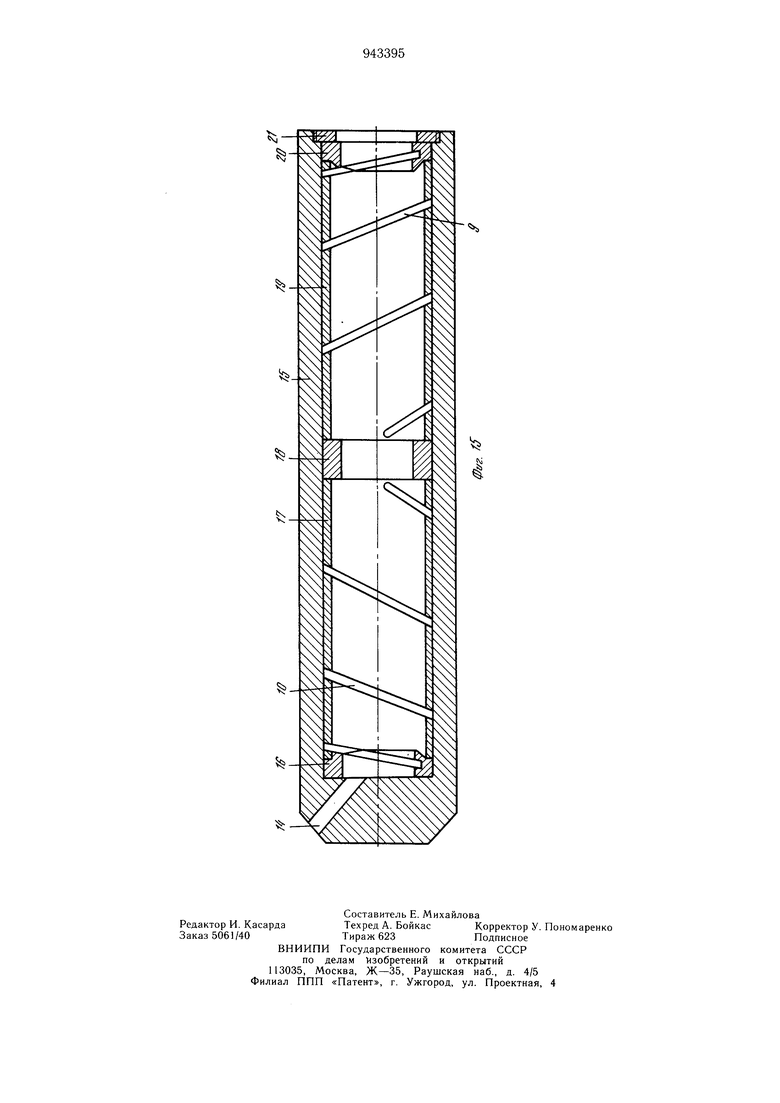
Недостаток данного механизма заключается в том, что он не пригоден для создания ударных и вибрационно-ударных режимов, чем объясняется узкая область его применения. Цель изобретения - повышение эффективносги проходки скважины в уплотнитель 1Ь х грунтах за счет обеспечения работы лкханизма в вибрационно-ударном режиме. Эта цель достигается тем, что внутренняя полость элемента возвратно-поступательного движения, выполненного в виде ударника разделена на две части, на каждой из которых нанесено по одному винтовому пазу противоположных направлений, во внутренней полости установлены рычаги, закрепленные на элементе вращательного движепия - валу в двух местах, соответствующих разным частям элемента возвратно-поступательного движения, и имеющие на противоположных от вала концах сухари, а элемент переключения направления движения выполнен в виде свободно установленной в каждой полости втулки с внутренними коническими поверхностями для попеременного ввода сухарей. Ви гговые пазы выполнены с переменным тагом м с числом заходов, равным числу р)1чаго8, прикрепленных к одной части вала. Яа фиг. I изображено устройство, внешний вид; ia фиг. 2 - вид А на фиг. 1; на фиг. 37возможные различные положсипя частей устройства; на фиг. 8-12 - возможные различные ноложения су.харя и переключаюп1ей втулки; на фиг. 13 и 14 -крайние положения сухаря в направляющем ги-;зу; на фиг. 15 - ударник, поперечное сечение. Механизм включает трубчатый корпус 1 (фиг. 1), заостренный спереди и нееущий стабилизаторы 2, федотврапдающие вра|це1 ие механиз.ма при пробивании скважины. Корнус .может быть цилиндрическим одного диаметра по всей длине или оо ступенями разных диаметров для уменьшения бокового сопротивления внедрению в грунт или в других целях. Сзади к корпусу крепится двигатель врапипелыюго действия, например фланцевый электродвигатель 3. Вал электродвигателя соед.ипяется с элементом вращательного движения валом 4 (фиг. 3). Задний конец вала 4 может иметь подшипниковую опору (не показана) в корпусе 1. Вал представляет собой гибкий упругий ipyTOK из конструкционпой стали и не требует механической (.бработки ио наружному диаметру. К валу 4 в двух местах ненодвижно прикреплены свои.ми концами слегка изогнутые гибкие упругие рычаги 5 и 6, несущие на противоположных концах сухари 7 и 8, которые входят в винтовые пазы 9 и 10 или в .элементы переключения направления движения, переключаюьчие втулки II и 12. Эти втулки могут скользить во внутренней полости элемепта возвратно-поступательного движения - ударника 13 по поверхности, на двух частях которой образованы винтовые пазы 9 и 10. Количество заходов каждого винтового паза равно числу соответствующих гибких рычагов, которое выбирается из конструктивных соображений и исходя из требований динамической уравновешенности механизма. В данном примере приняты двухзаходные винтовые пазы и по два соответствующих им рычага. Для обеспечения постоянного ускорения элемента возвратно-поступательного движения винтовые пазы могут иметь переменный щаг. Переменный шаг может быть использован также для плавного за.медления ударника перед ударом, если необходимо уменьшить энергию удара. Ударник 13 удерживается от вращения скользящей шпонкой (не показана). На переднем конце ударника 13 образовано отверстие 14 для перетока воздуха при движении ударника. Возможная конструкция ударника представлена на фиг. 15. Она включает корпус 15, в который последовательно вставлены концевая втулка 16, втулки 17-19, концевая втулка 20, сжатые гайкой 21. Винтовые пазы фрезеруются на втулках и .могут быть сквозными. Если требуется уменьшить упругие продольные деформации втулок 17 и 19, возникающие при их взаимодействии с сухарями, имеющими криволинейную поверхность 22, то они могут быть прикреплены к корпусу 15 сваркой через отверстия в корпусе. Мехапизм работает следующим образом. После придания .механизму нужного направления и включения электродвигателя начинается внедрение механизма в грунт. Механизм направляется и удерживается от вращения сначала стартовым устройством а затем стабилизатора.ми 2. Пусть в начале работы детали .механизма занимают положение, представленное на фиг. 3. При вращении вала 4 рычаги 5 и 6 под воздействием центробежной силы дополнительно разжимаются с усилием, минимально необходимым для удержания еухарей 7 и 8 в рабочем положении. Сухари 7 прижима1 угся к внутренней поверхности переключающей втулки 11, а сухари 8 входят в винтовые пазы и сообщают ударнику 13 движение вправо, удерживая втулку 12 на месте. Сухари 7 отделены от винтовых пазов 10 переключающей втулкой 11, что в больщем маещтабе представлено па фиг. 8. Положение деталей во время движения вправо видно на фиг. 4. При подходе ударника к крайнему правому положению, когда до него остается еще 5-15 мм, детали занимают положение показанное на фиг. 5, а для сухаря 7 и переключающей втулки 11 - на фиг. 9. Переключающие втулки 11 и 12 унерлись в соответствующие внутренние упоры ударника. При завершении движения ударника в крайнее правое положение сухари 7 и 8 скользят по скосам переключающих втулок 11 и 12, отжимаются к валу 4 и рывко.м переходят в новые положения - сухари 7 входят в винтовые пазы 10, а сухари 8 - в переключающую втулку 12, что представлено на фиг. 6. Ударник 13 наносит удар своим правым торцом по упору корпуса. Энергия удара зависит от скорости ударника, следовательно, от угла наклона винтовых пазов 9 и может быть сделана минимальной. Движение вправо закончилось, детали механизма заняли положение, необходимое для его движения влево (фиг. 6). Это движение начинается благодаря тому, что сухари 8 рычагов 5 отделены от винтовых пазов 9 переключающей втулкой 12, а рычаги 6 сухарями 7 взаимодействуют с винтовыми пазами 10 и сообщают ударнику движение влево. Положение деталей механизма при движении влево представлено на фиг. 7, а в больщем масщтабе для сухаря 7 и переключающей втулки 11 - на фиг. 10. При движении ударника влево переключающая втулка 11 упирается в сухарь 7 и удерживается на месте. Перед окончанием движения ударника влево сухарь 7 и переключающая втулка 11 занимают положение, представленное на фиг. 11, а после завершения хода переходят в положение, показанное на фиг. 3 или 12. При этом ударник 13 наносит удар своим левым торцом по упору корпуса. Энергия удара зависит от скорости ударника и, следовательно, от угла наклона винтовых пазов 10 и может быть сделана максимально допустимой по условиям прочности соударяющихся деталей. Механизм готов к движению ударника вправо. На фиг. 13 и 14 представлены форма сухаря 7 и его взаимодействие с винтовым пазом 10 в месте наибольщего и наименьшего наклона паза. Сухарь может иметь различные конструкции. При той, которая представлена на фиг. 13 и 14, он имеет криволинейную поверхность 22 для взаимодействия с винтовыми пазами, а также участок, ограниченный коническими поверхностями, которыми сухарь контактирует с переключающей втулкой. Этот участок условно показан щтриховы.ми линиями. Возможно шарнирное соединение рьЕчагов с сухарями. Механизм не требует точности изготовления, так как вращающиеся детали - вал 4, рычаги 5 и 6 выполнены гибкими, упругими и могут компенсировать возможные отклонения диаметральных размеров и перекосы. Передача ударов двигателю со стороны корпуса при необходимости ослабляется с помощью обычных средств - амортизаторов. Продольные размеры выбираются так, что между переключающими втулками и соответствующими поверхностями сухарей в момент удара остаются зазоры, показанные, напри.мер, на фиг. 12. Благодаря этому гибкие рычаги и переключающие втулки воспринимают только ту долю энергии ударника, которая необходима для переключения рычагов. Основная доля энергии удара передается непосредственно корпусу. При выборе размеров зазора учитывается также возможный небольщой отскок ударника. При выключении двигателя ударник может остановиться в одном из крайних положений или вблизи от них, незадолго до окончания прямого или обратного хода. Из-за того, что ударник не может разогнаться и накопить энергию, достаточную для переключения, возможно затруднение при повторном запуске. Для устранения этого затруднения достаточно кратковременно реверсировать двигатель. Технико-экономический эффект механизма для преобразования движений, используемого в качестве устройства для пробивания скважин, особенно протяженных, там, где не могут быть применены другие средства, выражается в значительном удещевлении работ за счет применения компактного и недорогого механизма. Важным достоинством механизма является воз.можность получения разнообразных законов движения ударника при прямом и обратном ходе. Благодаря этому на его основе могут быть созданы ручные мащины с уменьщенной отдачей, механизированный инстру.мент, мащины возвратно-поступательного действия для забивания в грунт свай, щпунтов, других конструкций, приводы виброударных технологических мащин, особенно тех, которые применяются для обработки твердых, сыпучих материалов, бетона, грунта. Если сообщить радиальную неуравновешенность валу, то могут быть созданы устройства, у которых продольные удары сочетаются с поперечными вибрациями. Такие устройства могут служить, например, для получения специальных режимов работы вибродоставочных устройств. Формула изобретения 1. Механизм для преобразования вращательного движения в соосное вибрациониоударное, включающий корпус, в котором размещены связанные друг с другом сухарем соосные элементы - один вращательного движения, а другой возвратно-поступательного с внутренней полостью, на одном Ио которых нанесены винтовые пазы двух направлений, элемент переключения направления движения, отличающийся тем, что, с целью повышения эффективности проходки скважины в уплотненных грунтах за счет обеспечения работы механизма в вибрационно-ударном режиме, внутренняя полость элемента возвратно-поступательного движения, выполненного в виде ударника, разделена на две части, на каждой из которых
нанесено no одному винтовому пазу противоположных направлений, во внутренней по.пости установлены рычаги, закрепленные на элементе вращательного движения - валу в двух местах, соответствующих разным частям элемента возвратно-поступательного движения, и имеющие на противоположных от вала концах сухаря, а элемент переключения направления движения выполнен в виде свободно установленной в каждой полости втулки с внутренними коническими поверхностями для попеременного ввода сухарей.
Источники информации, принятые во внимание при экспертизе
№ 517729, кл. F 16 Н 25/08, 1976 (прототнл).
т
Фиг.1 ff f /г ff f f
,
R
(
W
. /
rff
I
/
. /
