1
Изобретение относится к оЬласти моделирования динамических параметров и может быть использовано для динамических испытаний опорных узлов быстровращающихся шпинделей.
Известны устройства для моделирования динамических параметров, основанные на применении электромагнита-вибратора с якорем в виде ферромагнитного цилиндра, установленного ц, консольно в испытуемом шпинделе и приводимого во вращение приводным двигателем последнего. Для моделирования динамических параметров.в них используются две обмотки, распо- 15 ложенные на сердечнике электромагнита, одна из которых питается.постоянным током, другая - переменным током регулируемой частоты l и 2.
Однако они характеризуются не- 20 стабильностью тяговых характеристик элeкtpoмaгнитa при вращении якоря, сравнительно низкими энергетическими показателями, повышенным нагреве
испытуемого шпинделя со стороны якоря электромагнита.
Наиболее близким к предложенному по технической сущности является устройство, содержащее вибратор в виде электромагнита Переменного тока, дуговой статор с трехфазной обмоткой, охватывающий короткозамкнутый ротор, соединенный с валом шпинделя, который приводится во вращение от постороннего двигателя
Однако это устройство не позволяет производить моделирование в реальном масштабе нагрузки обеих опор шпинделя от нулевых и до предельных ее значений, а также не обеспечивает вращение испытуемого шпинделя без применения постороннего двигателя.
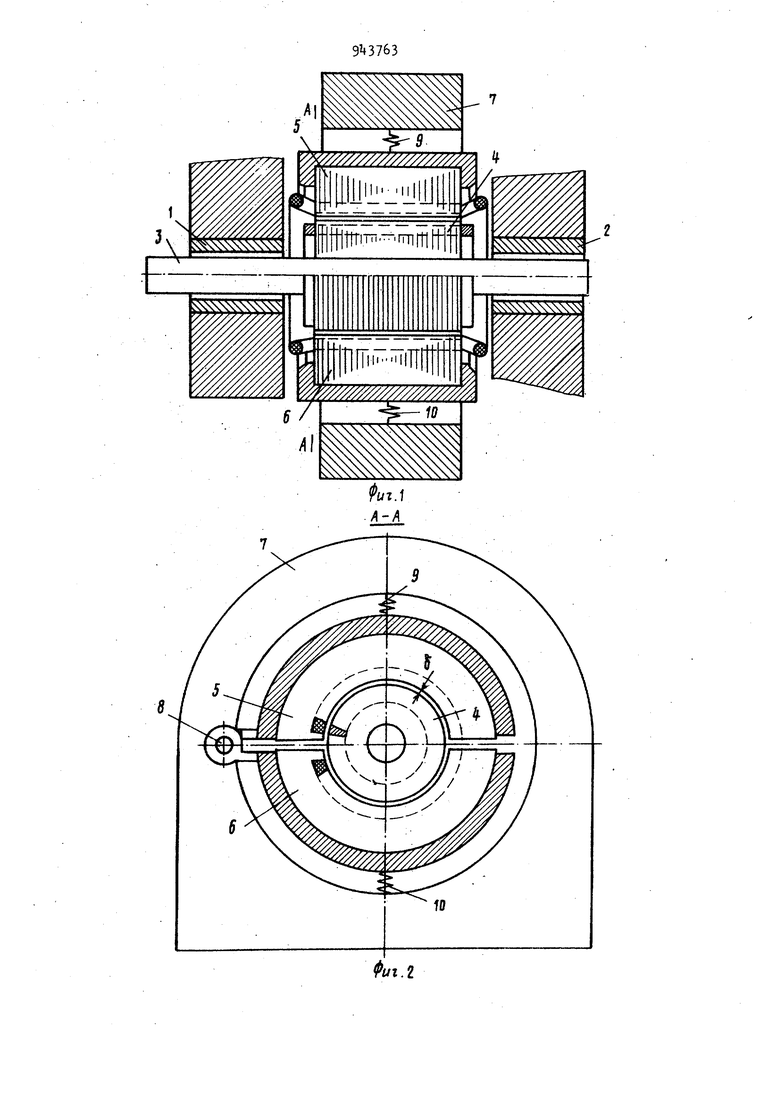
Цель изобретения - расширение функциональных возможностей за счет обеспечения моделирования в реальном масштабе динамических параметров шпинделя и упрощение устройства пу39тем исключения постороннего двигател для вращения шпинделя. Поставленная цель достигается тем что в устройство для моделирования динамических параметров шпинделя, содержащее вал шпинделя, установленный в корпусе и закрепленный в опорах, на валу шпинделя закреплен короткозамкнутый ротор, охватываемый первым дуговым статором, трехфазная обмотка которого соединена с выходом первого регулятора напряжения, электромагнит переменного тока, обмотка которого своими выводами подключена к ВЫХОД.НЫМ выводам однофазного преобразователя частоты, дополнительно введены второй дуговой статор, охватывающий ротор с диаметрально противоположной стороны и закрепленный рд ним концом на оси качания, второй ре гулятор напряжения, трехфазный преобразователь частоты, переключатель и пружинные динамометры, причем трехфазного преобразователя частоты через переключатель соединен с входом первого регулятора напряжения, связанным с входом второго регулятора напряжения, выход которого соединен с трехфазной обмоткой второго дугового статора, в первом дуговом статоре дополнительно уложена обмотка электромагнита переменного тока, а первый дуговой статор закреплен одним концом на оси качания второго дугового статора, другие концы дуговых статоров через пру жинные динамометры прикреплены к корпусу. На фиг. 1 представлено предложенное устройство, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - принципиальная схема устройства. Устройство содержит опоры скольже ния 1 и 2, вал шпинделя 3 на котором закреплен короткозамкнутый ротор «, дугорые статоры 5 и 6, установленное с равномерным рабочим воздушным зазором (S в корпусе 7 на оси качания 8 и пружинных динамометрах 9 и 10, трехфазные обмотки 11 и 12 статоров, регуляторы напряжения 13 и , переключатель 15, трехфазный преобразователь частоты 16, однофазный преобразователь частоты 17, обмотку электромагнита 18, расположенную в сердечнике дугового статора 5. Устройство работает следующим образомВал шпинделя 3 приводится в рабочее состояние путем подачи в опоры скольжения 1 и 2 смазывающего вещества, например сжатого газа или масла под давлением. На выходе трехфазного преобразователя частоты 16 выставляются минимальные значения частоты и напряжения, регуляторы напряжения 13 и It переводятся в положение, соответствующее максимальному значению выходного напряжения, переключатель 15 устанавливается во включенное положение, после чего вал шпинделя 3 приходит во вращение с минимальной частотой. Плавным изменением частоты и напряжения, при котором сохраняется постоянство их отношения (- cohst), производится дальнейший запуск асинхронного двигателя, образованного дуговыми статорами 5 и 6 и короткозамкнутым ротором 4, и частота вращения вала шпинделя 3 доводится до максимального значения. По окончании частотного запуска двигателя производятся динамические испытания опор скольжения 1 и 2, в ходе которых моделируется постоянная составляющая нагрузка обеих опор шпинделя Ff,Qc начиная от нулевого и кончая предельным ее значением. Для достижения режима, при котором постоянная составляющая нагрузки опор шпинделя Р,равна нулю, производится подрегулировка напряжения выходе регулятора И до значения, при котором становится справедливым равенство , Т - силы магнитного тяжения, приложенные со стороны дуговых статоров 5 и 6 К ротору , регистрируемые динамометрами Э и 10) MB суг марная масса вала шпинделя 3 и ротора ; - ускорение силы тяжести. Нагружение опор шпинделя производится путем снижения напряжения на выходе регулятора 13. Предельное значение нагрузки обеспечивается при нулевом напряжении на выходе регулятора 13. П0и этом напряжение на выходе регулятора И должно быть максимальным. Для моделирования переменной сос тавляющей нагрузки опор шпинделя на выходе однофазного преобразователя частоты J к которому подключена обмотка электромагнита 18, устанавливается напряжение требуемой частоты. Возникающая в результате питания обмотки электромагнита переме ным током электромагнитная сила Fg , воздействуя на ротор k, имитирует переменную составляющую нагруз ки опор шпинделя Ff gpewПоскольку в ходе испытаний опорных узлов шпинделя динамическая устойчивость системы вал - смазочный слой - подшипник проверяется на резонансных частотах, для возбуждения колебан «1 ротора 4 под действием силы РЗ требуется небольшая мощност и, следовательно, небольшой объем, занимаемый обмоткой электромагнита 18, и небольшие габариты преобразователя частоты 17. Таким образом, применение предло женного устройства позволяет в значительной степени рационализировать процесс динамических испытаний опор ных узлов быстровращающихся шпинделей, поскольку в ходе мoдeл фoвaния нагрузки при одновременном вращении шпинделя без применени постороннего двигателя достаточно просто определяется ряд .важнейших параметров: жесткость (статическая, динамическая) и перегрузочная способность опор, динамическая устойчивость системы вал - смазочный сло подшипник, характер течения смазывающего вещества в зазоре подшипника, энергети-ческие потери на трение В опорах и другие параметры шпиндел ного узла. Формула изобретения Устройство для моделирования динамических параметров шпинделя, содержащее вал шпинделя, установлен ныи в корпусе и закрепленный в опорах, на валу шпинделя закреплен короткозамкнутый ротор, охватываемый первым дуговым статором, трехфазная обмотка которого соединена с выходом первого регулятора напряжения электромагнит переменного тока, обмотка которого своими выводами подключена к выходным выводам однофазного преобразователя частоты, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения моделирования динамических параметров в реальном масштабе и упрощения устройства, -в него дополнительно введены второй дуговой статор, охватывающий ротор с диаметрально противоположной стороны и закрепленный одним концом на оси качания, второй регулятор напряжения, трехфазный преобразователь частоты, переключатель и пружинные динамометры, причем выход трехфазного преобразователя частоты через переключатель соединен с входом первого регулятора напряжения, связанным с входом второго регулятора напряжения, выход которого соединен с . трехфазной обмоткой второго дугового статора, в пе|эвом дуговом статоре дополнительно уложена обмотка эекэлектромагнита переменного тока, а первый дуговой статор закреплен одним концом на оси качания второго дугового статора, другие концы дуговых статоров через пружинные динамометры прикреплены к корпусу. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № i 05118, кл. G 06 G , 1972. 2.Авторское свидетельство СССР № , кл. G Об G 7Л8, 1977. 3. Авторское свидетельство СССР № 622116, кл. G Об G , Т976 (ПРОТОТИП),
А|
Ж.
-Vi | I . .. . I I //
||tlllTi-- n ni t|ff
w// ////////// m
9
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования силы резания | 1976 |
|
SU622116A1 |
| ЦЕНТРОБЕЖНЫЙ КРИОГЕННЫЙ КОМПРЕССОР | 1992 |
|
RU2034999C1 |
| АСИНХРОННЫЙ СВАРОЧНЫЙ ГЕНЕРАТОР | 2017 |
|
RU2673566C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ И РЕГУЛИРОВАНИЯ АВТОРЕЗОНАНСНЫХ КОЛЕБАНИЙ В ЭЛЕКТРОПРИВОДЕ ВОЗВРАТНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2410826C1 |
| Электромобиль энергосберегающий, экологически чистый и безопасный для людей | 2016 |
|
RU2639012C1 |
| Электромобиль энергосберегающий, экологически чистый и безопасный для людей | 2016 |
|
RU2637265C1 |
| ИСТОЧНИК ПИТАНИЯ ПУТЕВОЙ | 2008 |
|
RU2361033C1 |
| Электропоезд высокоскоростной, энергосберегающий, экологически чистый и безопасный для людей | 2016 |
|
RU2647208C2 |
| Электропривод переменного тока | 1985 |
|
SU1314428A1 |
| Электропоезд высокоскоростной, энергосберегающий, экологически чистый и безопасный для людей | 2016 |
|
RU2646683C1 |