113
Изобретение относится к электротехнике и может , быть использовано для частотного управления асинхронными электродвигателями с Короткозамк- нутым ротором в системах и механизмах общепромышленного назначения.
Цель изобретения - повышение стабильности характеристик при изменении температуры нагрева.
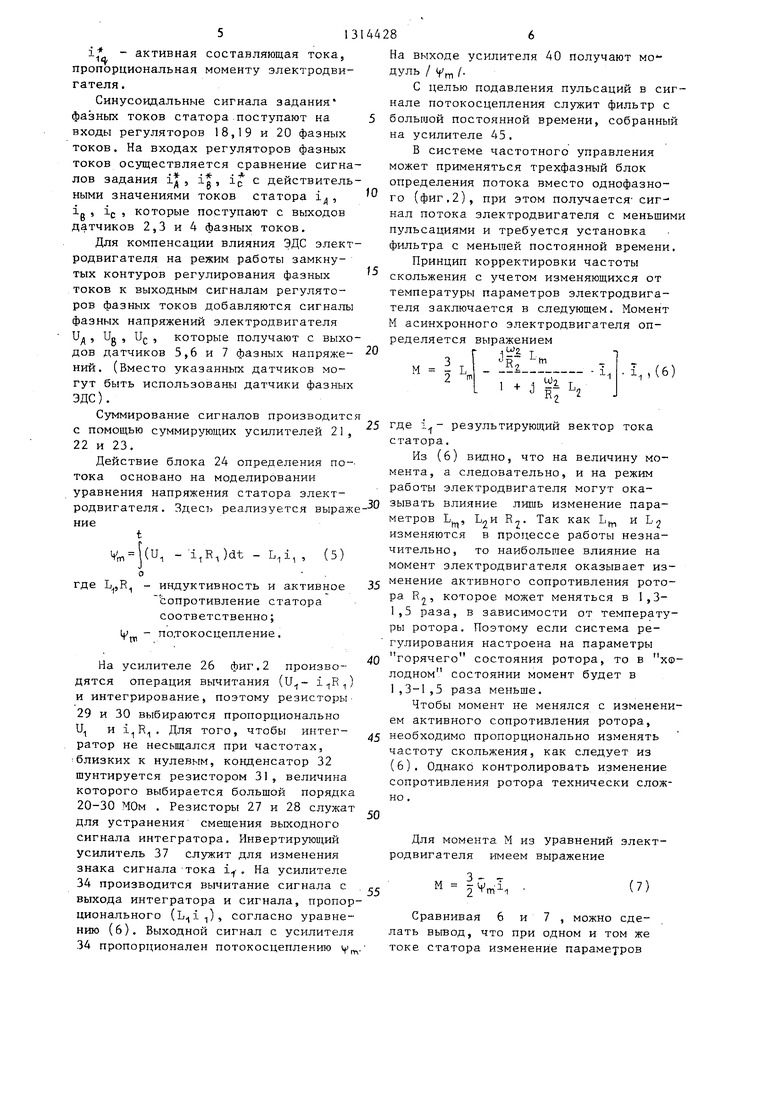
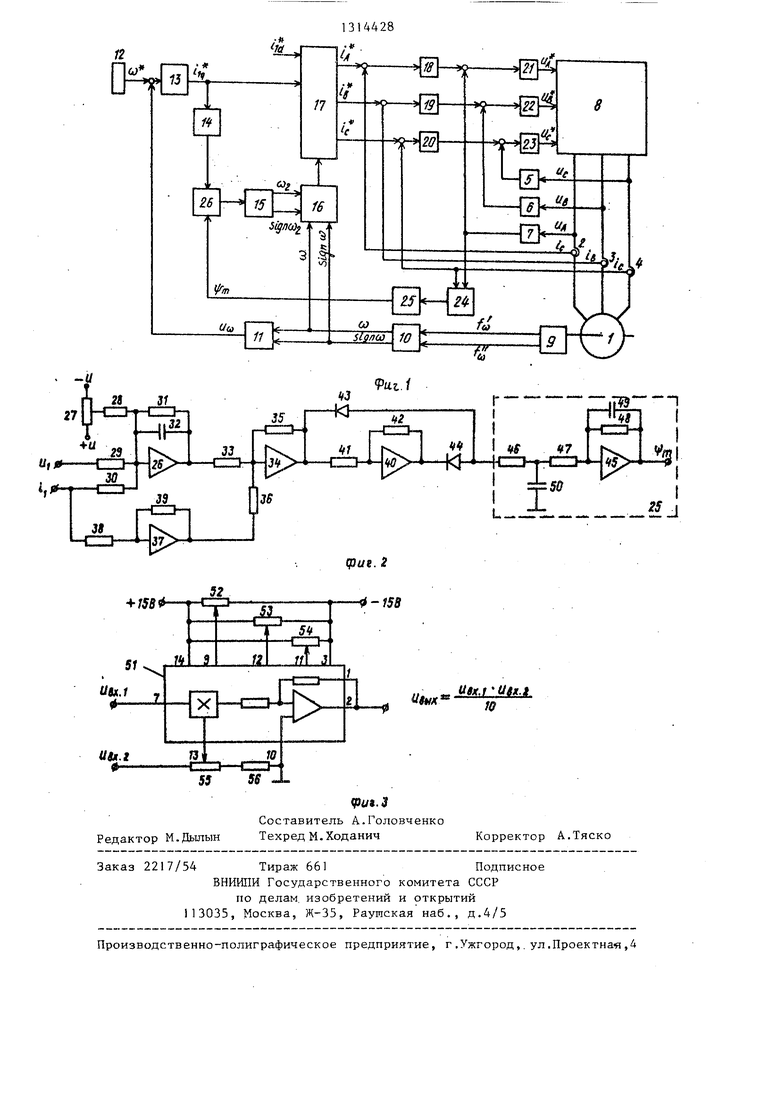
На фиг.1 представлена функциональная схема электропривода переменного тока; на фиг.2 - электрическая схема однофазного блока определения потока с фильтром на выходе; на фиг.З - схема блока умножения.
Электропривод переменного тока содержит асинхронный двигатель 1 (фиг,1) с короткозамкнутым ротором, подключенный через датчики 2,3 и 4 фазных токов и датчики 5,6 и 7 фазных напряжений к выходам преобразователя 8 частоты, импульсный датчик 9 скорости, установленный на валу асинхронного двигателя 1 с короткозамкнутым ротором и выполненный с двумя выходами, подключенными к входам блока 10 определения частоты и направления вращения, блок 11 определения аналогового сигнала частоты вращения, два входа которого подключены к соответствующим выходам блока 10 определения частоты и направления вращения, блок 12 задания скорости, подключенный выходом к первому входу регулятора 13 скорости, второй вход которого соединен с выходом блока 11 определения аналогового сигнала частоты вращения, блок 14 вычисления скольжения, управляемьш генератор 15 частоты скольжения, два выхода которого подключены к первым двум входам блока 16 суммирования частот,третий и четвертый входы которого подключе- ны к соответствующим выходам блока 10 определения частоты и направления вращения, формирователь 17 синусоидальных сигналов задания фазных токов, первый вход которого объединен с входом блока 14 вычисления скольжения и подключен к выходу регулятора 13 скорости, второй вход - к выходу блока 16 суммирования частот, выходы формирователя I7 синусоидальных сигналов задания фазных токов подключены к первым входам соответствующих регуляторов 18,19 и 20 фазных токов, вторые входы которых соединены с выходами соответствующих датчиков 2,3
4428
5
0
5
0
5
0
5
0
55
и 4 фазных токов, при этом выходы регуляторов и 20 фазных токов подключены к первым входам соответствующих суммирующих усилителей 21,22 и 23, вторые входы которых соединены с выходами соответствующих датчиков 5,6 и 7 фазных напряжений, а выходы суммирующих усилителей подключены к соответствующим управляющим входам преобразователя 8 частоты.
В электропривод переменного тока введены блок 24 определения потока, фильтр 25 и блок 26 умножения, первый вход которого подключен к выходу блока 14 вычисления скольжения, второй вход - к выходу фильтра 25, а выход блока 26 умножения подключен к входу управляемого генератора 15 частоты скольжения, при этом входы блока 24 определения потока подключены к выходам датчика 4 фазного тока и датчика 7 фазного напряжения (на фиг.1 представлено подключение входов блока 24 определения потока, выполненного однофазным).
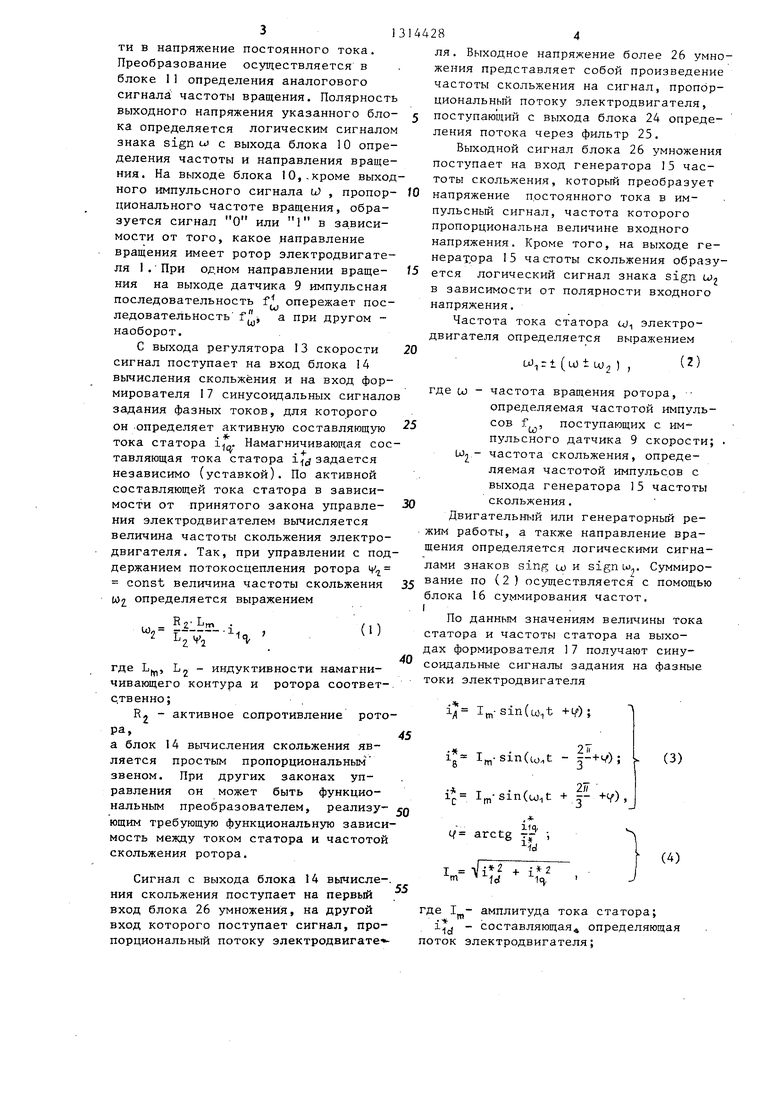
Блок 24 определения потока (однофазный) содержит интегратор 26 (фиг,2) с резисторами 27-31 и конденсатором 32, Выход интегратора 26 через резистор 33 подключен к входу сумми- - рующего усилителя 34 с резистором 35 в цепи обратной связи. К второму входу суммирующего усилителя 34 через резистор 36 подключен выход ин вертирующего усилителя 37 с резисто рами 38 и 39. Выход суммирующего усилителя 34 подключен к входу элемента выделения модуля, собранного на инвертирующем усилителе 40 с резисторами 41 и 42 и диодах 43 и 44.
Фильтр 25 выполнен на операцион- ном усилителе 45 (фиг.2) с резисторами 46-48 и конденсаторах 49 и 50.
Блок 26 умножения может быть вы- . полнен на микросхеме 51 (серии 525ПС2) с резисторами 52-54 коррекции и входными резисторами 55 и 56.
Электропривод переменного тока работает следующим образом.
Заданное значение скорости СО поступающее с выхода блока 12 скорости, и действительное значение скорости (в виде сигнала UQ)J поступающее . с выхода блока 11, сравниваются на входах регулятора 13 скорости. Сигнал 11 получается путем преобразования частоты следования импульсов с выхода датчика 9 скороети в напряжение постоянного тока. Преобразование осуществляется в блоке I1 определения аналогового сигнала частоты вращения. Полярность выходного напряжения указанного блока определяется логическим сигналом знака sign ы с выхода блока 10 определения частоты и направления вращения. На выходе блока 10,.кроме выходного импульсного сигнала и) , пропорционального частоте вращения, образуется сигнал О или 1 в зависимости от того, какое направление вращения имеет ротор электродвигателя 1. При одном направлении вращения на выходе датчика 9 импульсная последовательность f опережает последовательность f а при другом наоборот.
С выхода регулятора 13 скорости сигнал поступает на вход блока 14 вычисления скольжения и на вход формирователя I7 синусоидальных сигнало задания фазных токов, для которого он -определяет активную составляющую тока статора 1. Намагничивающая составляющая тока статора задается независимо (уставкой). По активной составляющей тока статора в зависимости от принятого закона управления электродвигателем вычисляется величина частоты скольжения электродвигателя. Так, при управлении с поддержанием потокосЦепления ротора 4 const величина частоты скольжения (2 определяется выражением
R2 L
2 L
Ч
(1)
где Lf, Lj - индуктивности намагничивающего контура и ротора соответ- с.твенно;
R, - активное сопротивление ротора, а блок 14 вычисления скольжения является простым пропорциональным звеном. При других законах управления он может быть функциональным преобразователем, реализу- ющим требующую функциональную зависимость между током статора и частотой скольжения ротора.
Сигнал с выхода блока 14 вычисле-. ния скольжения поступает на первьй вход блока 26 умножения, на другой вход которого поступает сигнал, пропорциональный потоку электродвигате 3144284
ля. Выходное напряжение более 26 умножения представляет собой произведение частоты скольжения на сигнал, пропорциональный потоку электродвигателя, поступающий с выхода блока 24 определения потока через фильтр 25.
Выходной сигнал блока 26 умножения поступает на вход генератора 15 частоты скольжения, который преобразует напряжение постоянного тока в импульсный сигнал, частота которого пропорциональна величине входного напряжения. Кроме того, на выходе ге- нерахрра 15 частоты скольжения образуется логический сигнал знака sign ы в зависимости от полярности входного напряжения.
Частота тока статора uj электродвигателя определяется выражением
(Z)
W
15
20
UJ,r±(u)tu)2 ) ,
в
25
30
35
40
где W - частота вращения ротора,
определяемая частотой импульсов f, поступающих с им-- пульсного датчика 9 скорости; частота скольжения, определяемая частотой импульсов с выхода генератора 15 частоты скольжения.
Двигательный или генераторный режим работы, а также направление вращения определяется логическими сигналами знаков sing ы и signw Суммирование по (2 ) осуществляется с помощью
блока 16 суммирования частот, I
По данным значениям величины тока
статора и частоты статора на выходах формирователя 17 получают синусоидальные сигналы задания на фазные токи электродвигателя
iT
(u),t +v);
ig (co.t - 3-+);
(3)
i.
2F , sin(u)it + j- +v),
,
Hq,
arctg T- -,
«
I {i т
(4)
+
ч
где амплитуда тока статора;
m
1 - составляющая определяющая поток электродвигателя;
щ
активная составляющая тока,
пропорциональная моменту электродвигателя.
Синусоидальные сигнала задания фазных токов статора поступают на входы регуляторов 18,19 и 20 фазнь х токов. На входах регуляторов фазных токов осуществляется сравнение сигналов задания ij, ig, i с действительными значениями токов статора 1, ig, ip, которые поступают с выходов датчиков 2,3 и 4 фазных токов.
Для компенсации влияния ЭДС электродвигателя на режим работы замкнутых контуров регулирования фазных токов к выходным сигналам регуляторов фазных токов добавляются сигналы фазных напряжений электродвигателя и , Ug , U(. , которые получают с выходов датчиков 5,6 и 7 фазных напряжений. (Вместо указанных датчиков могут быть использованы датчики фазных ЭДС).
Суммирование сигналов производитс с помощью суммирующих усилителей 21, 22 и 23.
Действие блока 24 определения потока основано на моделировании уравнения напряжения статора электродвигателя. Здесь реализуется выраж
ние
t
Vn, j(U, - - L,i, , (5)
о
где - индуктивность и активное сопротивление статора
соответственно; 1 - по.токосцепление.
На усилителе 26 фиг.2 производятся операция вычитания ( ,) и интегрирование, поэтому резисторы 29 и 30 выбираются пропорционально Ц и . Для того, чтобы интег- . ратор не несьщался при частотах, близких к нулевым, конденсатор 32 шунтируется резистором 31, величина которого выбирается большой порядка 20-30 МОм . Резисторы 27 и 28 служат для устранения смещения выходного сигнала интегратора. Инвертирующий усилитель 37 служит для изменения знака сигнала-тока На усилителе 34 производится вычитание сигнала с выхода интегратора и сигнала, пропорционального (), согласно уравнению (6). Выходной сигнал с усилителя 34 пропорционален потокосцеплению у
На выходе усилителя 40 получают мо дуль / Уп1 /
С целью подавления пульсаций в сигнале потокосцепления служит фильтр с большой постоянной времени, собранный на усилителе 45.
В системе частотного управления может применяться трехфазный блок определения потока вместо однофазно- го (фиг.2), при этом получается- сигнал потока электродвигателя с меньшими пульсациями и требуется установка фильтра с меньшей постоянной времени.
Принцип корректировки частоты скольжения с учетом изменяющихся от температуры параметров электродвигателя заключается в следующем. Момент М асинхронного электродвигателя определяется выражением
Г 1- L
JR 1
i-r:TFr
К-5 i
5 где результирующий вектор тока статора.
Из (6) видно, что на величину момента, а следовательно, и на режим работы электродвигателя могут ока- 0 зывать влияние лишь изменение параметров L , R. Так как L и Lj изменяются в процессе работы незначительно, то наибольшее влияние на момент электродвигателя оказывает из1С менение активного сопротивления ротора R,, которое может меняться в 1,3- 1,5 раза, в зависимости от температуры ротора. Поэтому если система регулирования настроена на параметры
Q горячего состояния ротора, то в холодном состоянии момент будет в 1,3-1,5 раза меньше.
Чтобы момент не менялся с изменением активного сопротивления ротора,
45 необходимо пропорционально изменять частоту скольжения, как следует из (6). Однако контролировать изменение сопротивления ротора технически сложно .
Для момента М из уравнений электродвигателя имеем выражение
55
М |Фт1.
(7)
Сравнивая 6 и 7 , можно сделать вывод, что при одном и том же токе статора изменение парамеуров
электродвигателя и прежде всего R ведет к изменению потока.
Следовательно, если с изменением потока электродвигателя пропорционально изменять частоту скольжения, то момент электродвигателя, а также режим его работы, должен оставаться постоянным при изменении температуры
Если электродвигатель 1 находится в холодном состоянии, то сигнал с выхода блока 24 определения потока уменьшается, что приводит к уменьшению .выходного напряжения блока 26 умножения и уменьшению частоты скольжения. С уменьшением частоты скольжения возрастает момент электродвигателя. С нагревом машины поток по- вьшается, что ведет к увеличению частоты скольжения и уменьшению момента .
Таким образом, предлагаемый электропривод переменного тока обеспечивает автоматическое корректирование частоты скольжения при изменениях параметров электродвигателя от нагрева, благодаря чему повышается стабильность моментных и энергетических характеристик в сравнении с изв;ест- ным решением.
Формула изобретения
Электропривод переменного тока, содержащий асинхронньш двигатель с короткозамкнутым ротором, подключенный через датчики фазных токов и напряжений к выходам преобразователя частоты, импульсный датчик скорости установленный на валу асинхронного двигателя с короткозамкнутым ротором и выполненный с двумя выходами, подключенными к входам блока определения частоты и направления враще-- ния, блок определения аналогового сигнала частоты вращения, два входа которого подключены к соответствую- щим выходам блока определения частоты и направления вращения, блок эада20
f5
144288
ния скорости, подключенный выходом к первому входу регулятора скорости, второй вход которого соединен с выходом блока определения аналогового 5 сигнала частоты вращения, блок вычисления скольжения, управляемый генератор частоты скольжения, два выхода которого подключены к первым двум входам блока суммирования часJO тот, третий и четвертый входы которого подключены к соответствующим выходам блока определения частоты и направления вращения, формирователь синус оидальных сигналов задания фазных токов, первый вход которого объединен с входом блока вычисления скольжения и подключен к выходу регулятора скорости, второй вход - к рыходу блока суммирования часчот, выходы формирователя синусоидальных сигналов задания фазных токов подключены к пер- . вым входам соответствующих регуляторов фазных токов, вторые входы которых соединены с выходами соответствующих датчиков фазных токов, при этом выходы регуляторов фазных токов подключены к первым входам соответствующих суммирующих усилителей, вторые входы которых соединены с выходами соответствующих датчиков фазных нап- ряжений, а выходы суммирующих усилителей подключены к соответствующим управляющим входам преобразователя частоты, отличающийся
35 тем, что, с целью повьшения стабильности характеристик при изменении температуры нагрева, в него введены блок определения потока, фильтр и блок умножения, первый вход которого под40 ключен к выходу блока вычисления скольжения, второй вход - к выходу фильтра, а выход блока умножения подключен к входу управляемого генератора частоты скольжения, при этом
45 входы блока определения потока подключены к выходу датчиков фазных токов и напряжений, а выход соединен с входом фильтра.
25
30
9u.i.1
fZJ
Uttix
uex.i пля.г Ю
Редактор М.Дьшын
.1
Составитель А.Головченко Техред М. Ходанич
Заказ 2217/54 Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам, изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород,.ул.Проектная,4
Корректор А.Тяско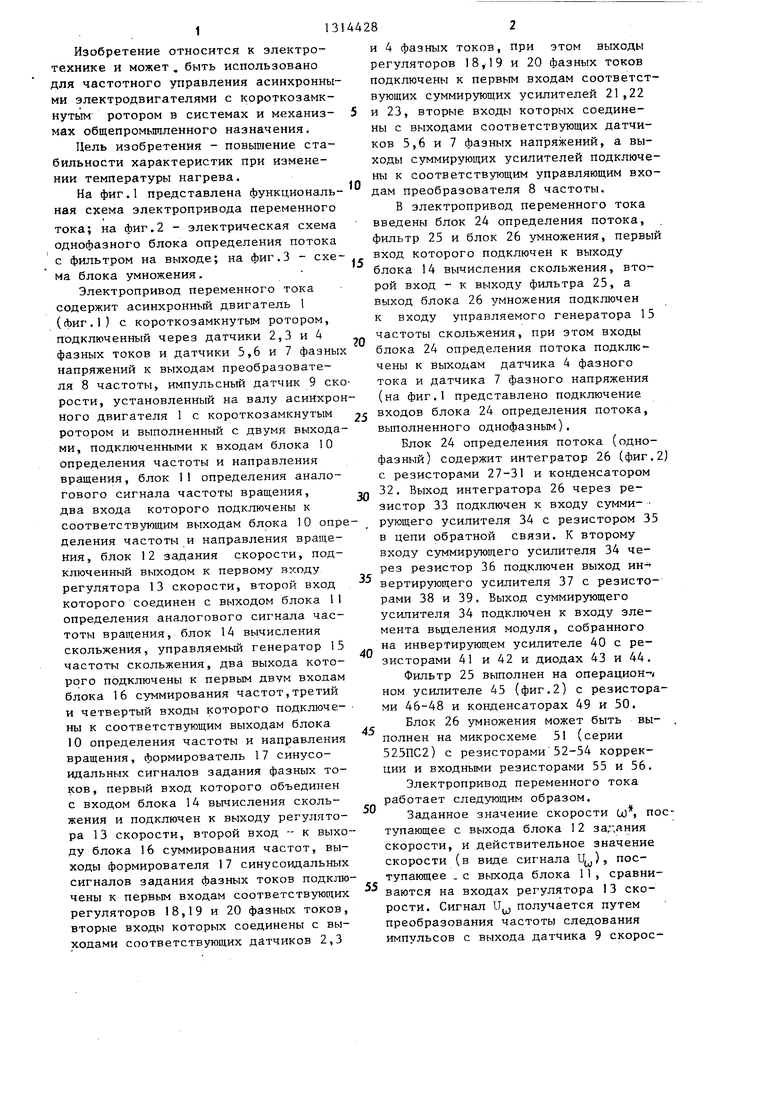
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
Изобретение относится к электротехнике и может быть использовано в системах и механизмах общепромьш- ленного назначения. Целью изобретения является повьшение стабильности характеристик при изменении температуры нагрева. Указанная цель достигается тем, что в электропривод переменного тока введены блок 26 умножения и последовательно соединенные между собой двухвходовый блок 24 определения потока и фильтр 25, Один вход блока 26 соединен с выходом блока 14 вычисления скольжения. Другой вход блока 26 подключен К выходу фильтра 25. Один из входов блока 24 связан с выходом датчика 4 тока в статора асинхронного двигателя (АД) 1 с короткозамкнутым ротором. Другой вход блока 24 соединен с выходом датчика 7 напряжения, подключенного к одной из фаз обмотки статора АД 1. Благодаря введению указанных блоков обеспечивается авто- магнитическая корректировка частоты скольжения при изменении температуры нагрева АД 1. Благодаря этому повышается стабильность момента и улучшаются энергетические показатели электропривода. 3 ил. | сл со Niii N 4 Ю 00
| Шрейнер Р.Т., Дмитренко Ю.А | |||
| Оптимальное частотное управление асинхронными электродвигателями | |||
| - Кишинев: Штиинца, 1982, с | |||
| Система механической тяги | 1919 |
|
SU158A1 |
| Дацковский Л.Х | |||
| и др | |||
| Регулирование асинхронным электроприводом на основе непосредственных преобразователей частоты | |||
| - Электричество,- 1982, № 3. | |||
